 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBest Segmentation Buddies for Image-Shape Correspondence
May 18, 2026Finding correspondences is a fundamental and extensively researched problem in computer vision and graphics. In this work, we examine the underexplored task of estimating segmentation-to-segmentation correspondence between images in the wild and untextured 3D shapes. This task is highly challenging due to substantial differences in appearance, geometry, and viewpoint. Our approach bridges the cross-modality gap by linking pixels in the image segment to vertices in the corresponding semantic part of the 3D shape. To achieve this, we first distill deep visual features from a 2D vision model onto the 3D shape surface, allowing for the computation of feature similarity between image pixels and shape vertices. Then, we identify Best Segmentation Buddies, vertices whose most similar image pixel lies within the image segmentation region, enabling the reliable discovery of vertices in semantically corresponding shape parts. Finally, we leverage distilled 3D features from the 2D image segmentation model to segment the shape directly in 3D, bootstrapping the correspondence process. We demonstrate the generality and robustness of our approach across a wide range of image-shape pairs, showcasing accurate and semantically meaningful correspondences. Our project page is at https://threedle.github.io/bsb/.
MeshOn: Intersection-Free Mesh-to-Mesh Composition
Apr 09, 2026We propose MeshOn, a method that finds physically and semantically realistic compositions of two input meshes. Given an accessory, a base mesh with a user-defined target region, and optional text strings for both meshes, MeshOn uses a multi-step optimization framework to realistically fit the meshes onto each other while preventing intersections. We initialize the shapes' rigid configuration via a structured alignment scheme using Vision-to-Language Models, which we then optimize using a combination of attractive geometric losses, and a physics-inspired barrier loss that prevents surface intersections. We then obtain a final deformation of the object, assisted by a diffusion prior. Our method successfully fits accessories of various materials over a breadth of target regions, and is designed to fit directly into existing digital artist workflows. We demonstrate the robustness and accuracy of our pipeline by comparing it with generative approaches and traditional registration algorithms.
Deep Feature Deformation Weights
Jan 18, 2026Handle-based mesh deformation has been a long-standing paradigm in computer graphics, enabling intuitive shape edits from sparse controls. Classic techniques offer precise and rapid deformation control. However, they solve an optimization problem with constraints defined by control handle placement, requiring a user to know apriori the ideal distribution of handles on the shape to accomplish the desired edit. The mapping from handle set to deformation behavior is often unintuitive and, importantly, non-semantic. Modern data-driven methods, on the other hand, leverage a data prior to obtain semantic edits, but are slow and imprecise. We propose a technique that fuses the semantic prior of data with the precise control and speed of traditional frameworks. Our approach is surprisingly simple yet effective: deep feature proximity makes for smooth and semantic deformation weights, with no need for additional regularization. The weights can be computed in real-time for any surface point, whereas prior methods require optimization for new handles. Moreover, the semantic prior from deep features enables co-deformation of semantic parts. We introduce an improved feature distillation pipeline, barycentric feature distillation, which efficiently uses the visual signal from shape renders to minimize distillation cost. This allows our weights to be computed for high resolution meshes in under a minute, in contrast to potentially hours for both classical and neural methods. We preserve and extend properties of classical methods through feature space constraints and locality weighting. Our field representation allows for automatic detection of semantic symmetries, which we use to produce symmetry-preserving deformations. We show a proof-of-concept application which can produce deformations for meshes up to 1 million faces in real-time on a consumer-grade machine.
LL3M: Large Language 3D Modelers
Aug 11, 2025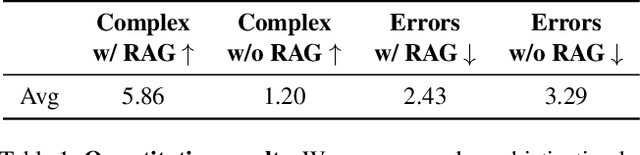
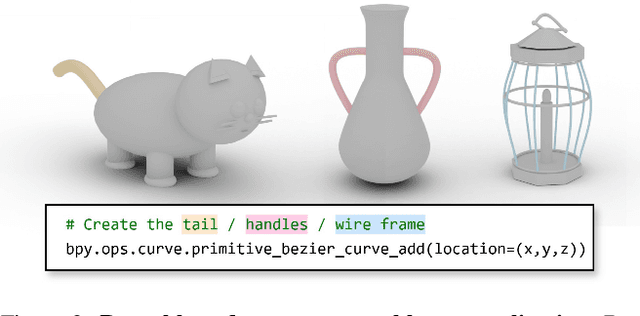
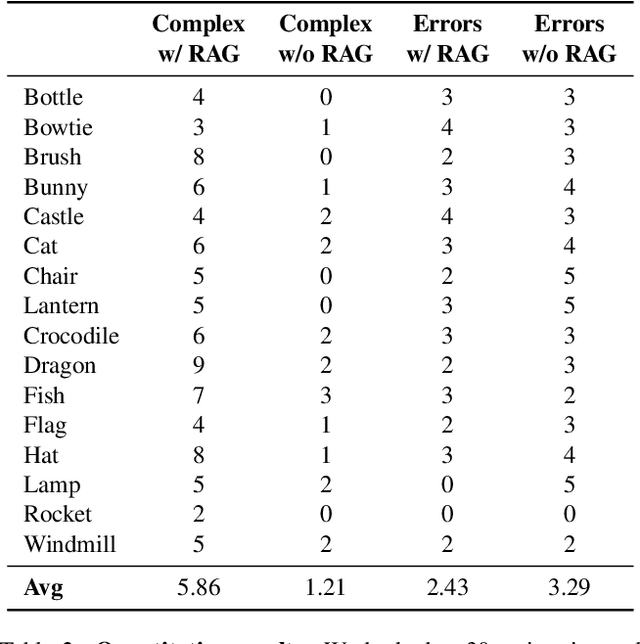

We present LL3M, a multi-agent system that leverages pretrained large language models (LLMs) to generate 3D assets by writing interpretable Python code in Blender. We break away from the typical generative approach that learns from a collection of 3D data. Instead, we reformulate shape generation as a code-writing task, enabling greater modularity, editability, and integration with artist workflows. Given a text prompt, LL3M coordinates a team of specialized LLM agents to plan, retrieve, write, debug, and refine Blender scripts that generate and edit geometry and appearance. The generated code works as a high-level, interpretable, human-readable, well-documented representation of scenes and objects, making full use of sophisticated Blender constructs (e.g. B-meshes, geometry modifiers, shader nodes) for diverse, unconstrained shapes, materials, and scenes. This code presents many avenues for further agent and human editing and experimentation via code tweaks or procedural parameters. This medium naturally enables a co-creative loop in our system: agents can automatically self-critique using code and visuals, while iterative user instructions provide an intuitive way to refine assets. A shared code context across agents enables awareness of previous attempts, and a retrieval-augmented generation knowledge base built from Blender API documentation, BlenderRAG, equips agents with examples, types, and functions empowering advanced modeling operations and code correctness. We demonstrate the effectiveness of LL3M across diverse shape categories, style and material edits, and user-driven refinements. Our experiments showcase the power of code as a generative and interpretable medium for 3D asset creation. Our project page is at https://threedle.github.io/ll3m.
WIR3D: Visually-Informed and Geometry-Aware 3D Shape Abstraction
May 07, 2025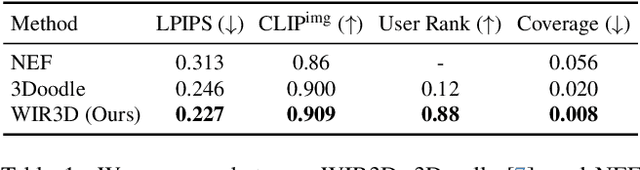

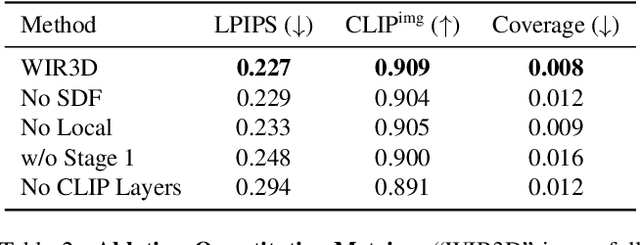
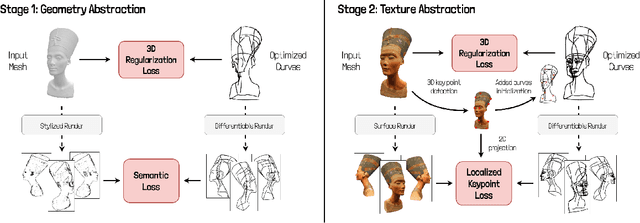
We present WIR3D, a technique for abstracting 3D shapes through a sparse set of visually meaningful curves in 3D. We optimize the parameters of Bezier curves such that they faithfully represent both the geometry and salient visual features (e.g. texture) of the shape from arbitrary viewpoints. We leverage the intermediate activations of a pre-trained foundation model (CLIP) to guide our optimization process. We divide our optimization into two phases: one for capturing the coarse geometry of the shape, and the other for representing fine-grained features. Our second phase supervision is spatially guided by a novel localized keypoint loss. This spatial guidance enables user control over abstracted features. We ensure fidelity to the original surface through a neural SDF loss, which allows the curves to be used as intuitive deformation handles. We successfully apply our method for shape abstraction over a broad dataset of shapes with varying complexity, geometric structure, and texture, and demonstrate downstream applications for feature control and shape deformation.
Geometry in Style: 3D Stylization via Surface Normal Deformation
Mar 29, 2025We present Geometry in Style, a new method for identity-preserving mesh stylization. Existing techniques either adhere to the original shape through overly restrictive deformations such as bump maps or significantly modify the input shape using expressive deformations that may introduce artifacts or alter the identity of the source shape. In contrast, we represent a deformation of a triangle mesh as a target normal vector for each vertex neighborhood. The deformations we recover from target normals are expressive enough to enable detailed stylizations yet restrictive enough to preserve the shape's identity. We achieve such deformations using our novel differentiable As-Rigid-As-Possible (dARAP) layer, a neural-network-ready adaptation of the classical ARAP algorithm which we use to solve for per-vertex rotations and deformed vertices. As a differentiable layer, dARAP is paired with a visual loss from a text-to-image model to drive deformations toward style prompts, altogether giving us Geometry in Style. Our project page is at https://threedle.github.io/geometry-in-style.
Structurally Disentangled Feature Fields Distillation for 3D Understanding and Editing
Feb 20, 2025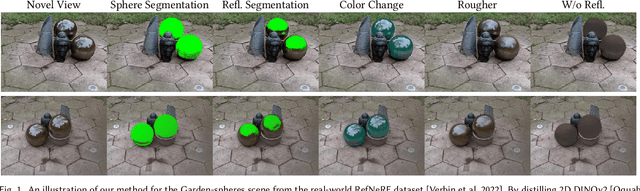
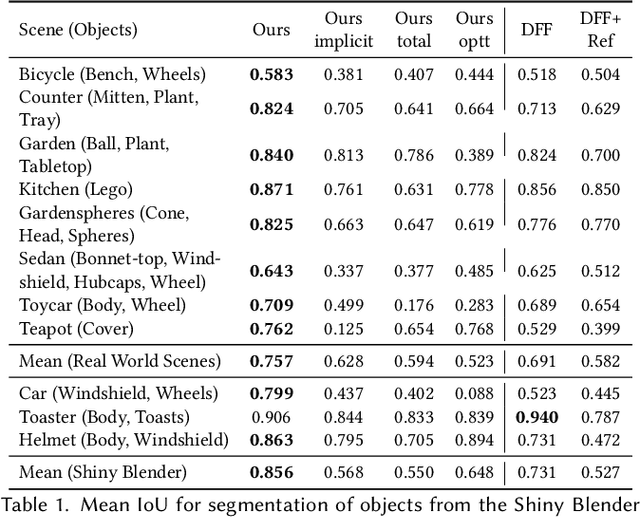
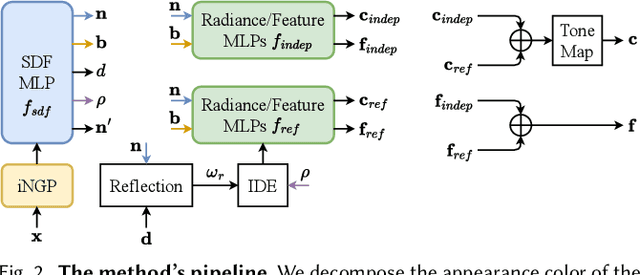
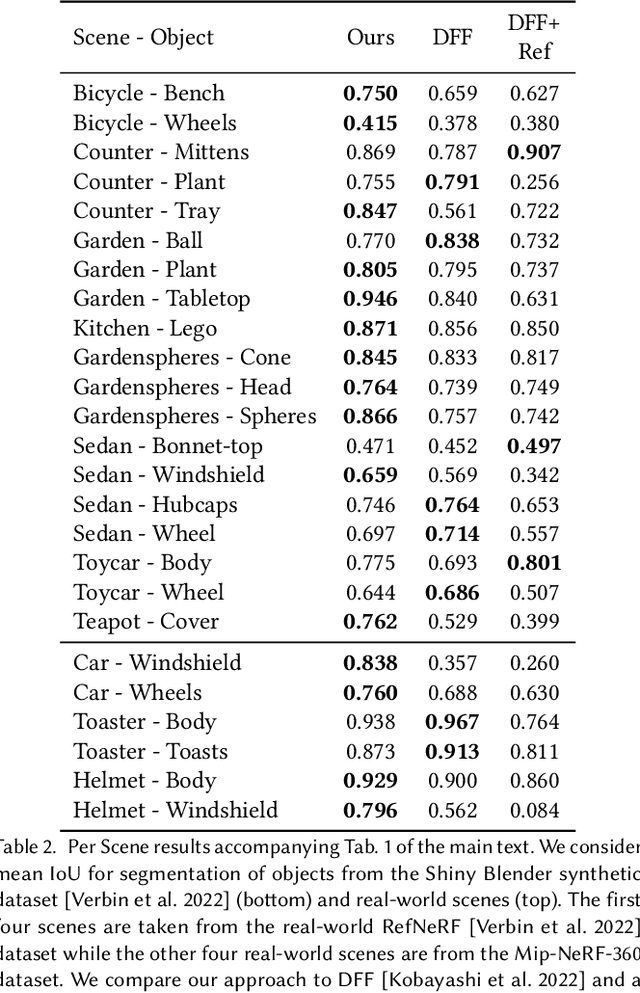
Recent work has demonstrated the ability to leverage or distill pre-trained 2D features obtained using large pre-trained 2D models into 3D features, enabling impressive 3D editing and understanding capabilities using only 2D supervision. Although impressive, models assume that 3D features are captured using a single feature field and often make a simplifying assumption that features are view-independent. In this work, we propose instead to capture 3D features using multiple disentangled feature fields that capture different structural components of 3D features involving view-dependent and view-independent components, which can be learned from 2D feature supervision only. Subsequently, each element can be controlled in isolation, enabling semantic and structural understanding and editing capabilities. For instance, using a user click, one can segment 3D features corresponding to a given object and then segment, edit, or remove their view-dependent (reflective) properties. We evaluate our approach on the task of 3D segmentation and demonstrate a set of novel understanding and editing tasks.
MeshUp: Multi-Target Mesh Deformation via Blended Score Distillation
Aug 27, 2024We propose MeshUp, a technique that deforms a 3D mesh towards multiple target concepts, and intuitively controls the region where each concept is expressed. Conveniently, the concepts can be defined as either text queries, e.g., "a dog" and "a turtle," or inspirational images, and the local regions can be selected as any number of vertices on the mesh. We can effectively control the influence of the concepts and mix them together using a novel score distillation approach, referred to as the Blended Score Distillation (BSD). BSD operates on each attention layer of the denoising U-Net of a diffusion model as it extracts and injects the per-objective activations into a unified denoising pipeline from which the deformation gradients are calculated. To localize the expression of these activations, we create a probabilistic Region of Interest (ROI) map on the surface of the mesh, and turn it into 3D-consistent masks that we use to control the expression of these activations. We demonstrate the effectiveness of BSD empirically and show that it can deform various meshes towards multiple objectives.
DGD: Dynamic 3D Gaussians Distillation
May 29, 2024



We tackle the task of learning dynamic 3D semantic radiance fields given a single monocular video as input. Our learned semantic radiance field captures per-point semantics as well as color and geometric properties for a dynamic 3D scene, enabling the generation of novel views and their corresponding semantics. This enables the segmentation and tracking of a diverse set of 3D semantic entities, specified using a simple and intuitive interface that includes a user click or a text prompt. To this end, we present DGD, a unified 3D representation for both the appearance and semantics of a dynamic 3D scene, building upon the recently proposed dynamic 3D Gaussians representation. Our representation is optimized over time with both color and semantic information. Key to our method is the joint optimization of the appearance and semantic attributes, which jointly affect the geometric properties of the scene. We evaluate our approach in its ability to enable dense semantic 3D object tracking and demonstrate high-quality results that are fast to render, for a diverse set of scenes. Our project webpage is available on https://isaaclabe.github.io/DGD-Website/
iSeg: Interactive 3D Segmentation via Interactive Attention
Apr 04, 2024We present iSeg, a new interactive technique for segmenting 3D shapes. Previous works have focused mainly on leveraging pre-trained 2D foundation models for 3D segmentation based on text. However, text may be insufficient for accurately describing fine-grained spatial segmentations. Moreover, achieving a consistent 3D segmentation using a 2D model is challenging since occluded areas of the same semantic region may not be visible together from any 2D view. Thus, we design a segmentation method conditioned on fine user clicks, which operates entirely in 3D. Our system accepts user clicks directly on the shape's surface, indicating the inclusion or exclusion of regions from the desired shape partition. To accommodate various click settings, we propose a novel interactive attention module capable of processing different numbers and types of clicks, enabling the training of a single unified interactive segmentation model. We apply iSeg to a myriad of shapes from different domains, demonstrating its versatility and faithfulness to the user's specifications. Our project page is at https://threedle.github.io/iSeg/.