 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Self-Optimizing Electron Microscope: Robust Tuning of Aberration Coefficients via Physics-Aware Multi-Objective Bayesian Optimization
Jan 26, 2026Realizing high-throughput aberration-corrected Scanning Transmission Electron Microscopy (STEM) exploration of atomic structures requires rapid tuning of multipole probe correctors while compensating for the inevitable drift of the optical column. While automated alignment routines exist, conventional approaches rely on serial, gradient-free searches (e.g., Nelder-Mead) that are sample-inefficient and struggle to correct multiple interacting parameters simultaneously. Conversely, emerging deep learning methods offer speed but often lack the flexibility to adapt to varying sample conditions without extensive retraining. Here, we introduce a Multi-Objective Bayesian Optimization (MOBO) framework for rapid, data-efficient aberration correction. Importantly, this framework does not prescribe a single notion of image quality; instead, it enables user-defined, physically motivated reward formulations (e.g., symmetry-induced objectives) and uses Pareto fronts to expose the resulting trade-offs between competing experimental priorities. By using Gaussian Process regression to model the aberration landscape probabilistically, our workflow actively selects the most informative lens settings to evaluate next, rather than performing an exhaustive blind search. We demonstrate that this active learning loop is more robust than traditional optimization algorithms and effectively tunes focus, astigmatism, and higher-order aberrations. By balancing competing objectives, this approach enables "self-optimizing" microscopy by dynamically sustaining optimal performance during experiments.
Deep Feature Deformation Weights
Jan 18, 2026Handle-based mesh deformation has been a long-standing paradigm in computer graphics, enabling intuitive shape edits from sparse controls. Classic techniques offer precise and rapid deformation control. However, they solve an optimization problem with constraints defined by control handle placement, requiring a user to know apriori the ideal distribution of handles on the shape to accomplish the desired edit. The mapping from handle set to deformation behavior is often unintuitive and, importantly, non-semantic. Modern data-driven methods, on the other hand, leverage a data prior to obtain semantic edits, but are slow and imprecise. We propose a technique that fuses the semantic prior of data with the precise control and speed of traditional frameworks. Our approach is surprisingly simple yet effective: deep feature proximity makes for smooth and semantic deformation weights, with no need for additional regularization. The weights can be computed in real-time for any surface point, whereas prior methods require optimization for new handles. Moreover, the semantic prior from deep features enables co-deformation of semantic parts. We introduce an improved feature distillation pipeline, barycentric feature distillation, which efficiently uses the visual signal from shape renders to minimize distillation cost. This allows our weights to be computed for high resolution meshes in under a minute, in contrast to potentially hours for both classical and neural methods. We preserve and extend properties of classical methods through feature space constraints and locality weighting. Our field representation allows for automatic detection of semantic symmetries, which we use to produce symmetry-preserving deformations. We show a proof-of-concept application which can produce deformations for meshes up to 1 million faces in real-time on a consumer-grade machine.
Mic-hackathon 2024: Hackathon on Machine Learning for Electron and Scanning Probe Microscopy
Jun 10, 2025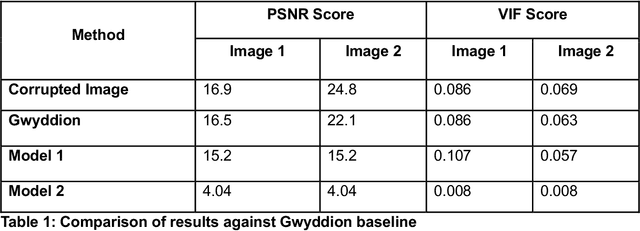

Microscopy is a primary source of information on materials structure and functionality at nanometer and atomic scales. The data generated is often well-structured, enriched with metadata and sample histories, though not always consistent in detail or format. The adoption of Data Management Plans (DMPs) by major funding agencies promotes preservation and access. However, deriving insights remains difficult due to the lack of standardized code ecosystems, benchmarks, and integration strategies. As a result, data usage is inefficient and analysis time is extensive. In addition to post-acquisition analysis, new APIs from major microscope manufacturers enable real-time, ML-based analytics for automated decision-making and ML-agent-controlled microscope operation. Yet, a gap remains between the ML and microscopy communities, limiting the impact of these methods on physics, materials discovery, and optimization. Hackathons help bridge this divide by fostering collaboration between ML researchers and microscopy experts. They encourage the development of novel solutions that apply ML to microscopy, while preparing a future workforce for instrumentation, materials science, and applied ML. This hackathon produced benchmark datasets and digital twins of microscopes to support community growth and standardized workflows. All related code is available at GitHub: https://github.com/KalininGroup/Mic-hackathon-2024-codes-publication/tree/1.0.0.1
WIR3D: Visually-Informed and Geometry-Aware 3D Shape Abstraction
May 07, 2025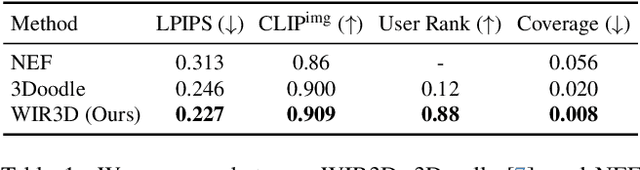

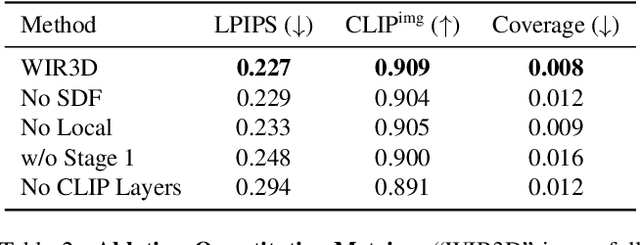
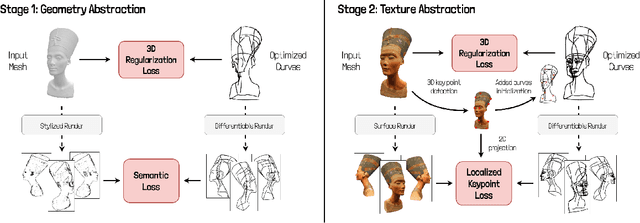
We present WIR3D, a technique for abstracting 3D shapes through a sparse set of visually meaningful curves in 3D. We optimize the parameters of Bezier curves such that they faithfully represent both the geometry and salient visual features (e.g. texture) of the shape from arbitrary viewpoints. We leverage the intermediate activations of a pre-trained foundation model (CLIP) to guide our optimization process. We divide our optimization into two phases: one for capturing the coarse geometry of the shape, and the other for representing fine-grained features. Our second phase supervision is spatially guided by a novel localized keypoint loss. This spatial guidance enables user control over abstracted features. We ensure fidelity to the original surface through a neural SDF loss, which allows the curves to be used as intuitive deformation handles. We successfully apply our method for shape abstraction over a broad dataset of shapes with varying complexity, geometric structure, and texture, and demonstrate downstream applications for feature control and shape deformation.
Adaptive Self-Supervised Learning Strategies for Dynamic On-Device LLM Personalization
Sep 25, 2024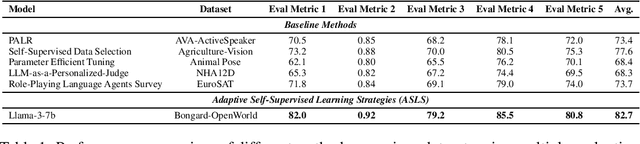
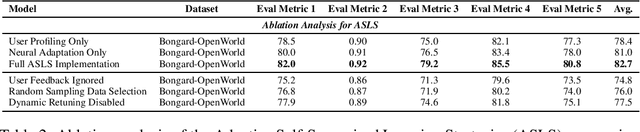
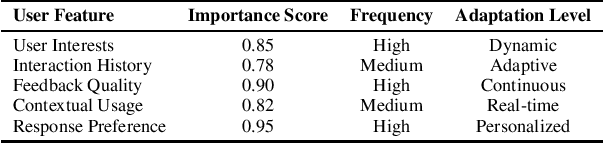
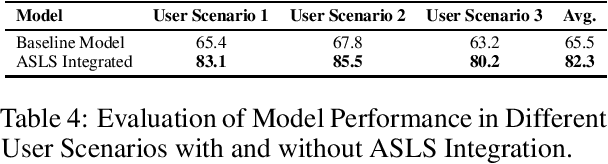
Large language models (LLMs) have revolutionized how we interact with technology, but their personalization to individual user preferences remains a significant challenge, particularly in on-device applications. Traditional methods often depend heavily on labeled datasets and can be resource-intensive. To address these issues, we present Adaptive Self-Supervised Learning Strategies (ASLS), which utilizes self-supervised learning techniques to personalize LLMs dynamically. The framework comprises a user profiling layer for collecting interaction data and a neural adaptation layer for real-time model fine-tuning. This innovative approach enables continuous learning from user feedback, allowing the model to generate responses that align closely with user-specific contexts. The adaptive mechanisms of ASLS minimize computational demands and enhance personalization efficiency. Experimental results across various user scenarios illustrate the superior performance of ASLS in boosting user engagement and satisfaction, highlighting its potential to redefine LLMs as highly responsive and context-aware systems on-device.
General targeted machine learning for modern causal mediation analysis
Aug 26, 2024Causal mediation analyses investigate the mechanisms through which causes exert their effects, and are therefore central to scientific progress. The literature on the non-parametric definition and identification of mediational effects in rigourous causal models has grown significantly in recent years, and there has been important progress to address challenges in the interpretation and identification of such effects. Despite great progress in the causal inference front, statistical methodology for non-parametric estimation has lagged behind, with few or no methods available for tackling non-parametric estimation in the presence of multiple, continuous, or high-dimensional mediators. In this paper we show that the identification formulas for six popular non-parametric approaches to mediation analysis proposed in recent years can be recovered from just two statistical estimands. We leverage this finding to propose an all-purpose one-step estimation algorithm that can be coupled with machine learning in any mediation study that uses any of these six definitions of mediation. The estimators have desirable properties, such as $\sqrt{n}$-convergence and asymptotic normality. Estimating the first-order correction for the one-step estimator requires estimation of complex density ratios on the potentially high-dimensional mediators, a challenge that is solved using recent advancements in so-called Riesz learning. We illustrate the properties of our methods in a simulation study and illustrate its use on real data to estimate the extent to which pain management practices mediate the total effect of having a chronic pain disorder on opioid use disorder.
Invariant Discovery of Features Across Multiple Length Scales: Applications in Microscopy and Autonomous Materials Characterization
Aug 01, 2024Physical imaging is a foundational characterization method in areas from condensed matter physics and chemistry to astronomy and spans length scales from atomic to universe. Images encapsulate crucial data regarding atomic bonding, materials microstructures, and dynamic phenomena such as microstructural evolution and turbulence, among other phenomena. The challenge lies in effectively extracting and interpreting this information. Variational Autoencoders (VAEs) have emerged as powerful tools for identifying underlying factors of variation in image data, providing a systematic approach to distilling meaningful patterns from complex datasets. However, a significant hurdle in their application is the definition and selection of appropriate descriptors reflecting local structure. Here we introduce the scale-invariant VAE approach (SI-VAE) based on the progressive training of the VAE with the descriptors sampled at different length scales. The SI-VAE allows the discovery of the length scale dependent factors of variation in the system. Here, we illustrate this approach using the ferroelectric domain images and generalize it to the movies of the electron-beam induced phenomena in graphene and topography evolution across combinatorial libraries. This approach can further be used to initialize the decision making in automated experiments including structure-property discovery and can be applied across a broad range of imaging methods. This approach is universal and can be applied to any spatially resolved data including both experimental imaging studies and simulations, and can be particularly useful for exploration of phenomena such as turbulence, scale-invariant transformation fronts, etc.
HyperFields: Towards Zero-Shot Generation of NeRFs from Text
Oct 27, 2023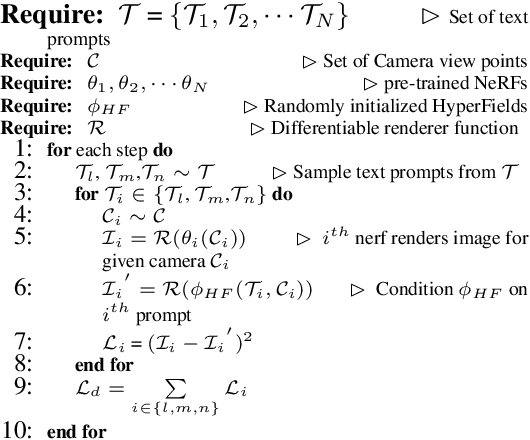
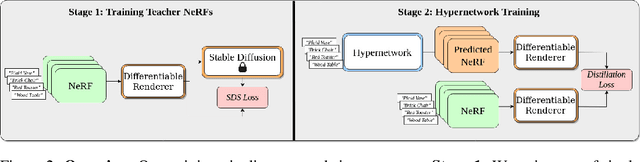

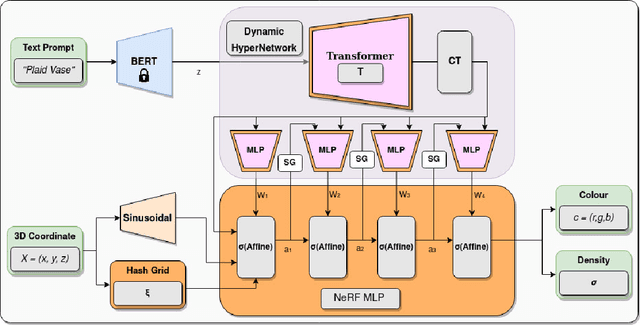
We introduce HyperFields, a method for generating text-conditioned Neural Radiance Fields (NeRFs) with a single forward pass and (optionally) some fine-tuning. Key to our approach are: (i) a dynamic hypernetwork, which learns a smooth mapping from text token embeddings to the space of NeRFs; (ii) NeRF distillation training, which distills scenes encoded in individual NeRFs into one dynamic hypernetwork. These techniques enable a single network to fit over a hundred unique scenes. We further demonstrate that HyperFields learns a more general map between text and NeRFs, and consequently is capable of predicting novel in-distribution and out-of-distribution scenes -- either zero-shot or with a few finetuning steps. Finetuning HyperFields benefits from accelerated convergence thanks to the learned general map, and is capable of synthesizing novel scenes 5 to 10 times faster than existing neural optimization-based methods. Our ablation experiments show that both the dynamic architecture and NeRF distillation are critical to the expressivity of HyperFields.
TEDi: Temporally-Entangled Diffusion for Long-Term Motion Synthesis
Jul 29, 2023The gradual nature of a diffusion process that synthesizes samples in small increments constitutes a key ingredient of Denoising Diffusion Probabilistic Models (DDPM), which have presented unprecedented quality in image synthesis and been recently explored in the motion domain. In this work, we propose to adapt the gradual diffusion concept (operating along a diffusion time-axis) into the temporal-axis of the motion sequence. Our key idea is to extend the DDPM framework to support temporally varying denoising, thereby entangling the two axes. Using our special formulation, we iteratively denoise a motion buffer that contains a set of increasingly-noised poses, which auto-regressively produces an arbitrarily long stream of frames. With a stationary diffusion time-axis, in each diffusion step we increment only the temporal-axis of the motion such that the framework produces a new, clean frame which is removed from the beginning of the buffer, followed by a newly drawn noise vector that is appended to it. This new mechanism paves the way towards a new framework for long-term motion synthesis with applications to character animation and other domains.
DA Wand: Distortion-Aware Selection using Neural Mesh Parameterization
Dec 14, 2022We present a neural technique for learning to select a local sub-region around a point which can be used for mesh parameterization. The motivation for our framework is driven by interactive workflows used for decaling, texturing, or painting on surfaces. Our key idea is to incorporate segmentation probabilities as weights of a classical parameterization method, implemented as a novel differentiable parameterization layer within a neural network framework. We train a segmentation network to select 3D regions that are parameterized into 2D and penalized by the resulting distortion, giving rise to segmentations which are distortion-aware. Following training, a user can use our system to interactively select a point on the mesh and obtain a large, meaningful region around the selection which induces a low-distortion parameterization. Our code and project page are currently available.