 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneraLight: Improving Environment Generalization of Traffic Signal Control via Meta Reinforcement Learning
Sep 17, 2020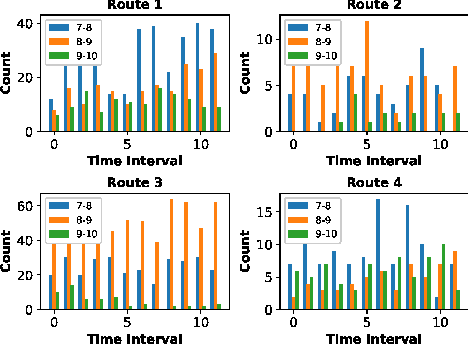

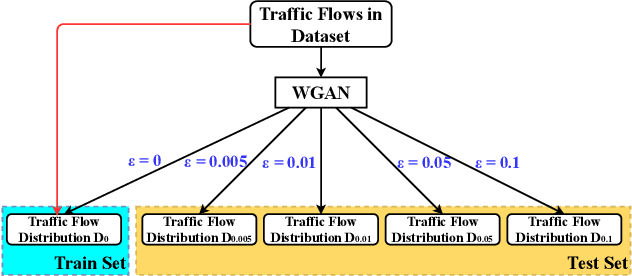
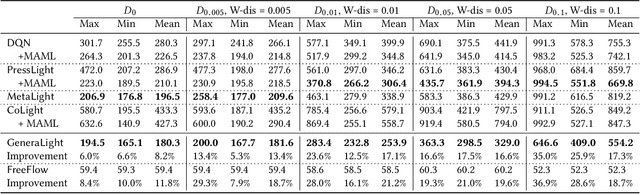
The heavy traffic congestion problem has always been a concern for modern cities. To alleviate traffic congestion, researchers use reinforcement learning (RL) to develop better traffic signal control (TSC) algorithms in recent years. However, most RL models are trained and tested in the same traffic flow environment, which results in a serious overfitting problem. Since the traffic flow environment in the real world keeps varying, these models can hardly be applied due to the lack of generalization ability. Besides, the limited number of accessible traffic flow data brings extra difficulty in testing the generalization ability of the models. In this paper, we design a novel traffic flow generator based on Wasserstein generative adversarial network to generate sufficient diverse and quality traffic flows and use them to build proper training and testing environments. Then we propose a meta-RL TSC framework GeneraLight to improve the generalization ability of TSC models. GeneraLight boosts the generalization performance by combining the idea of flow clustering and model-agnostic meta-learning. We conduct extensive experiments on multiple real-world datasets to show the superior performance of GeneraLight on generalizing to different traffic flows.
CityFlow: A Multi-Agent Reinforcement Learning Environment for Large Scale City Traffic Scenario
May 13, 2019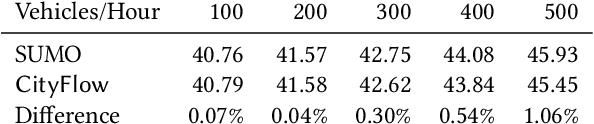
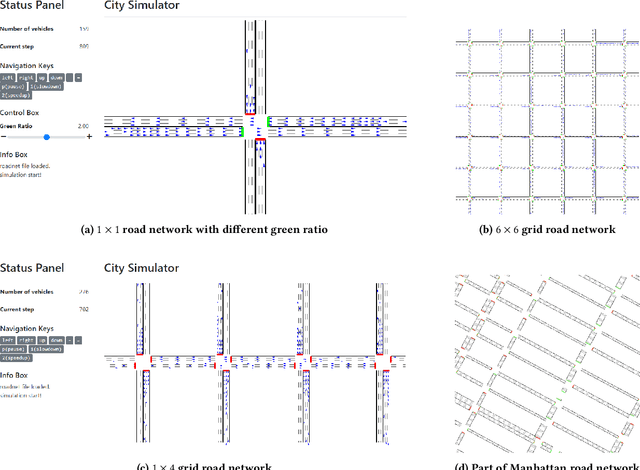
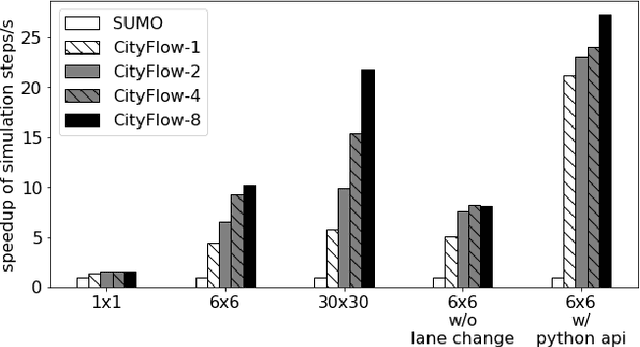
Traffic signal control is an emerging application scenario for reinforcement learning. Besides being as an important problem that affects people's daily life in commuting, traffic signal control poses its unique challenges for reinforcement learning in terms of adapting to dynamic traffic environment and coordinating thousands of agents including vehicles and pedestrians. A key factor in the success of modern reinforcement learning relies on a good simulator to generate a large number of data samples for learning. The most commonly used open-source traffic simulator SUMO is, however, not scalable to large road network and large traffic flow, which hinders the study of reinforcement learning on traffic scenarios. This motivates us to create a new traffic simulator CityFlow with fundamentally optimized data structures and efficient algorithms. CityFlow can support flexible definitions for road network and traffic flow based on synthetic and real-world data. It also provides user-friendly interface for reinforcement learning. Most importantly, CityFlow is more than twenty times faster than SUMO and is capable of supporting city-wide traffic simulation with an interactive render for monitoring. Besides traffic signal control, CityFlow could serve as the base for other transportation studies and can create new possibilities to test machine learning methods in the intelligent transportation domain.
Learning Phase Competition for Traffic Signal Control
May 12, 2019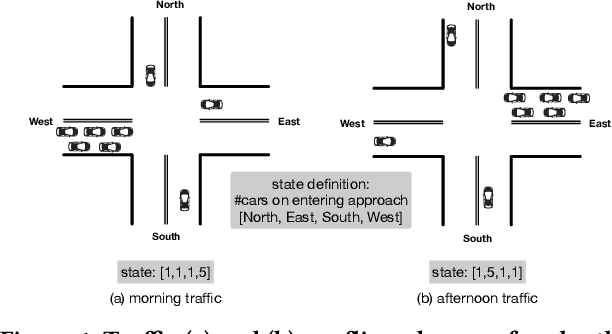
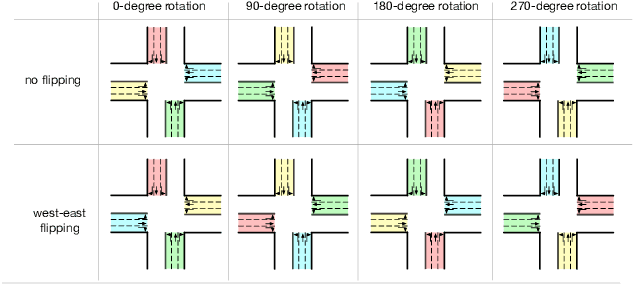
Increasingly available city data and advanced learning techniques have empowered people to improve the efficiency of our city functions. Among them, improving the urban transportation efficiency is one of the most prominent topics. Recent studies have proposed to use reinforcement learning (RL) for traffic signal control. Different from traditional transportation approaches which rely heavily on prior knowledge, RL can learn directly from the feedback. On the other side, without a careful model design, existing RL methods typically take a long time to converge and the learned models may not be able to adapt to new scenarios. For example, a model that is trained well for morning traffic may not work for the afternoon traffic because the traffic flow could be reversed, resulting in a very different state representation. In this paper, we propose a novel design called FRAP, which is based on the intuitive principle of phase competition in traffic signal control: when two traffic signals conflict, priority should be given to one with larger traffic movement (i.e., higher demand). Through the phase competition modeling, our model achieves invariance to symmetrical cases such as flipping and rotation in traffic flow. By conducting comprehensive experiments, we demonstrate that our model finds better solutions than existing RL methods in the complicated all-phase selection problem, converges much faster during training, and achieves superior generalizability for different road structures and traffic conditions.
CoLight: Learning Network-level Cooperation for Traffic Signal Control
May 11, 2019
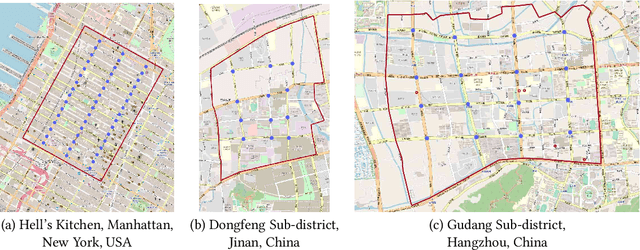
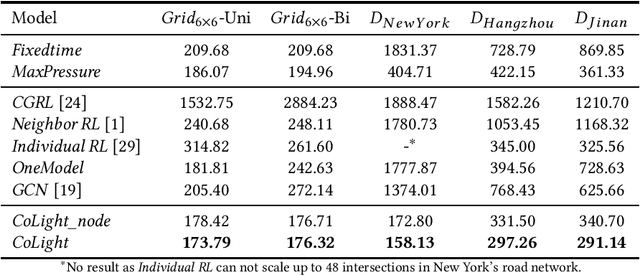
Cooperation is critical in multi-agent reinforcement learning (MARL). In the context of traffic signal control, good cooperation among the traffic signal agents enables the vehicles to move through intersections more smoothly. Conventional transportation approaches implement cooperation by pre-calculating the offsets between two intersections. Such pre-calculated offsets are not suitable for dynamic traffic environments. To incorporate cooperation in reinforcement learning (RL), two typical approaches are proposed to take the influence of other agents into consideration: (1) learning the communications (i.e., the representation of influences between agents) and (2) learning joint actions for agents. While joint modeling of actions has shown a preferred trend in recent studies, an in-depth study of improving the learning of communications between agents has not been systematically studied in the context of traffic signal control. To learn the communications between agents, in this paper, we propose to use graph attentional network to facilitate cooperation. Specifically, for a target intersection in a network, our proposed model, CoLight, cannot only incorporate the influences of neighboring intersections but learn to differentiate their impacts to the target intersection. To the best of our knowledge, we are the first to use graph attentional network in the setting of reinforcement learning for traffic signal control. In experiments, we demonstrate that by learning the communication, the proposed model can achieve surprisingly good performance, whereas the existing approaches based on joint action modeling fail to learn well.
pg-Causality: Identifying Spatiotemporal Causal Pathways for Air Pollutants with Urban Big Data
Apr 18, 2018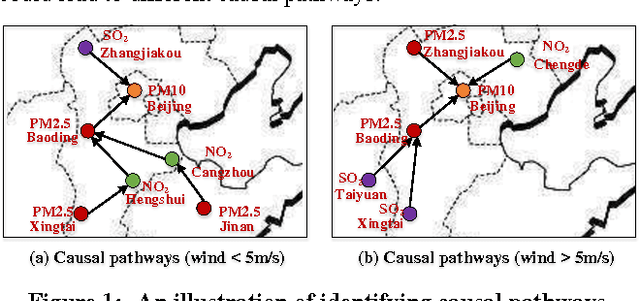
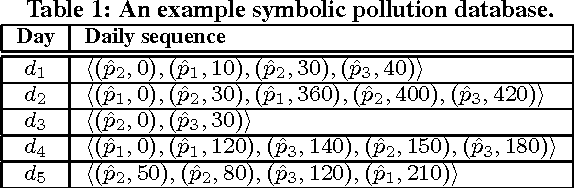
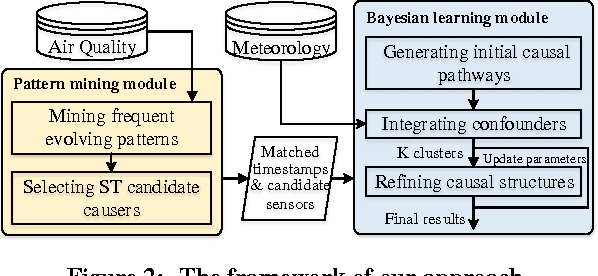
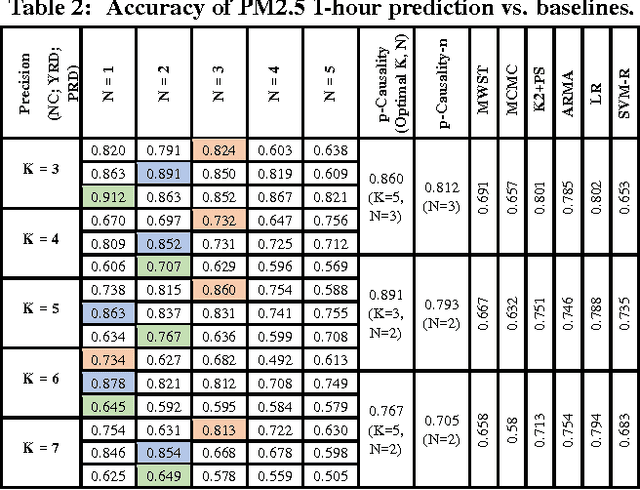
Many countries are suffering from severe air pollution. Understanding how different air pollutants accumulate and propagate is critical to making relevant public policies. In this paper, we use urban big data (air quality data and meteorological data) to identify the \emph{spatiotemporal (ST) causal pathways} for air pollutants. This problem is challenging because: (1) there are numerous noisy and low-pollution periods in the raw air quality data, which may lead to unreliable causality analysis, (2) for large-scale data in the ST space, the computational complexity of constructing a causal structure is very high, and (3) the \emph{ST causal pathways} are complex due to the interactions of multiple pollutants and the influence of environmental factors. Therefore, we present \emph{p-Causality}, a novel pattern-aided causality analysis approach that combines the strengths of \emph{pattern mining} and \emph{Bayesian learning} to efficiently and faithfully identify the \emph{ST causal pathways}. First, \emph{Pattern mining} helps suppress the noise by capturing frequent evolving patterns (FEPs) of each monitoring sensor, and greatly reduce the complexity by selecting the pattern-matched sensors as "causers". Then, \emph{Bayesian learning} carefully encodes the local and ST causal relations with a Gaussian Bayesian network (GBN)-based graphical model, which also integrates environmental influences to minimize biases in the final results. We evaluate our approach with three real-world data sets containing 982 air quality sensors, in three regions of China from 01-Jun-2013 to 19-Dec-2015. Results show that our approach outperforms the traditional causal structure learning methods in time efficiency, inference accuracy and interpretability.