 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLIPM-Guided Reinforcement Learning for Stable and Perceptive Locomotion in Bipedal Robots
Sep 11, 2025Achieving stable and robust perceptive locomotion for bipedal robots in unstructured outdoor environments remains a critical challenge due to complex terrain geometry and susceptibility to external disturbances. In this work, we propose a novel reward design inspired by the Linear Inverted Pendulum Model (LIPM) to enable perceptive and stable locomotion in the wild. The LIPM provides theoretical guidance for dynamic balance by regulating the center of mass (CoM) height and the torso orientation. These are key factors for terrain-aware locomotion, as they help ensure a stable viewpoint for the robot's camera. Building on this insight, we design a reward function that promotes balance and dynamic stability while encouraging accurate CoM trajectory tracking. To adaptively trade off between velocity tracking and stability, we leverage the Reward Fusion Module (RFM) approach that prioritizes stability when needed. A double-critic architecture is adopted to separately evaluate stability and locomotion objectives, improving training efficiency and robustness. We validate our approach through extensive experiments on a bipedal robot in both simulation and real-world outdoor environments. The results demonstrate superior terrain adaptability, disturbance rejection, and consistent performance across a wide range of speeds and perceptual conditions.
A Trustworthy Multi-LLM Network: Challenges,Solutions, and A Use Case
May 06, 2025Large Language Models (LLMs) demonstrate strong potential across a variety of tasks in communications and networking due to their advanced reasoning capabilities. However, because different LLMs have different model structures and are trained using distinct corpora and methods, they may offer varying optimization strategies for the same network issues. Moreover, the limitations of an individual LLM's training data, aggravated by the potential maliciousness of its hosting device, can result in responses with low confidence or even bias. To address these challenges, we propose a blockchain-enabled collaborative framework that connects multiple LLMs into a Trustworthy Multi-LLM Network (MultiLLMN). This architecture enables the cooperative evaluation and selection of the most reliable and high-quality responses to complex network optimization problems. Specifically, we begin by reviewing related work and highlighting the limitations of existing LLMs in collaboration and trust, emphasizing the need for trustworthiness in LLM-based systems. We then introduce the workflow and design of the proposed Trustworthy MultiLLMN framework. Given the severity of False Base Station (FBS) attacks in B5G and 6G communication systems and the difficulty of addressing such threats through traditional modeling techniques, we present FBS defense as a case study to empirically validate the effectiveness of our approach. Finally, we outline promising future research directions in this emerging area.
Convergence of Symbiotic Communications and Blockchain for Sustainable and Trustworthy 6G Wireless Networks
Aug 11, 2024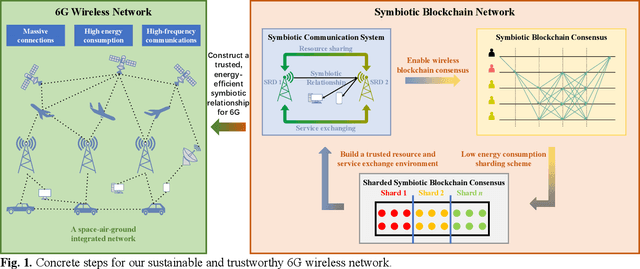
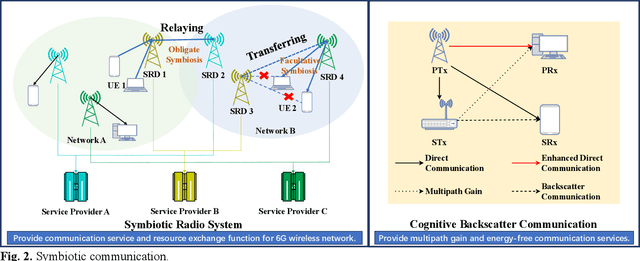
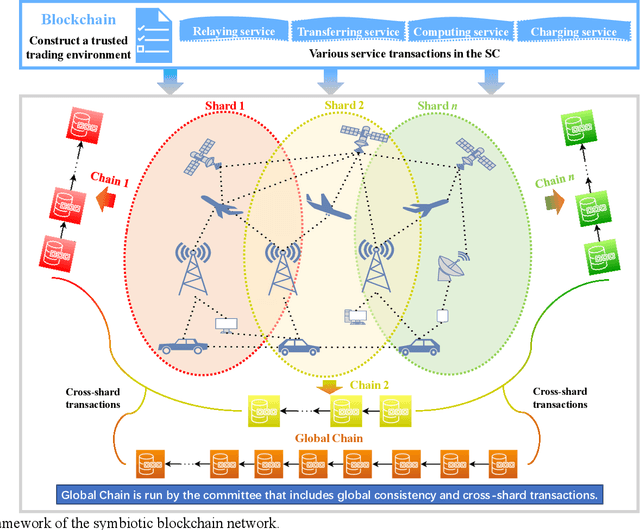
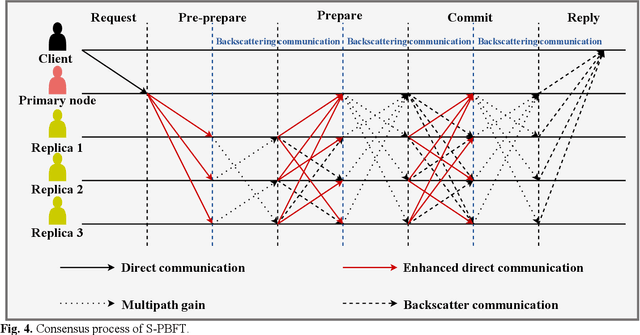
Symbiotic communication (SC) is known as a new wireless communication paradigm, similar to the natural ecosystem population, and can enable multiple communication systems to cooperate and mutualize through service exchange and resource sharing. As a result, SC is seen as an important potential technology for future sixth-generation (6G) communications, solving the problem of lack of spectrum resources and energy inefficiency. Symbiotic relationships among communication systems can complement radio resources in 6G. However, the absence of established trust relationships among diverse communication systems presents a formidable hurdle in ensuring efficient and trusted resource and service exchange within SC frameworks. To better realize trusted SC services in 6G, in this paper, we propose a solution that converges SC and blockchain, called a symbiotic blockchain network (SBN). Specifically, we first use cognitive backscatter communication to transform blockchain consensus, that is, the symbiotic blockchain consensus (SBC), so that it can be better suited for the wireless network. Then, for SBC, we propose a highly energy-efficient sharding scheme to meet the extremely low power consumption requirements in 6G. Finally, such a blockchain scheme guarantees trusted transactions of communication services in SC. Through ablation experiments, our proposed SBN demonstrates significant efficacy in mitigating energy consumption and reducing processing latency in adversarial networks, which is expected to achieve a sustainable and trusted 6G wireless network.
Combining Teacher-Student with Representation Learning: A Concurrent Teacher-Student Reinforcement Learning Paradigm for Legged Locomotion
May 17, 2024Thanks to the explosive developments of data-driven learning methodologies recently, reinforcement learning (RL) emerges as a promising solution to address the legged locomotion problem in robotics. In this manuscript, we propose a novel concurrent teacher-student reinforcement learning architecture for legged locomotion over challenging terrains, based only on proprioceptive measurements in real-world deployment. Different from convectional teacher-student architecture that trains the teacher policy via RL and transfers the knowledge to the student policy through supervised learning, our proposed architecture trains teacher and student policy networks concurrently under the reinforcement learning paradigm. To achieve this, we develop a new training scheme based on conventional proximal policy gradient (PPO) method to accommodate the interaction between teacher policy network and student policy network. The effectiveness of the proposed architecture as well as the new training scheme is demonstrated through extensive indoor and outdoor experiments on quadrupedal robots and point-foot bipedal robot, showcasing robust locomotion over challenging terrains and improved performance compared to two-stage training methods.
POMDP-Guided Active Force-Based Search for Robotic Insertion
Apr 05, 2024In robotic insertion tasks where the uncertainty exceeds the allowable tolerance, a good search strategy is essential for successful insertion and significantly influences efficiency. The commonly used blind search method is time-consuming and does not exploit the rich contact information. In this paper, we propose a novel search strategy that actively utilizes the information contained in the contact configuration and shows high efficiency. In particular, we formulate this problem as a Partially Observable Markov Decision Process (POMDP) with carefully designed primitives based on an in-depth analysis of the contact configuration's static stability. From the formulated POMDP, we can derive a novel search strategy. Thanks to its simplicity, this search strategy can be incorporated into a Finite-State-Machine (FSM) controller. The behaviors of the FSM controller are realized through a low-level Cartesian Impedance Controller. Our method is based purely on the robot's proprioceptive sensing and does not need visual or tactile sensors. To evaluate the effectiveness of our proposed strategy and control framework, we conduct extensive comparison experiments in simulation, where we compare our method with the baseline approach. The results demonstrate that our proposed method achieves a higher success rate with a shorter search time and search trajectory length compared to the baseline method. Additionally, we show that our method is robust to various initial displacement errors.
BC4LLM: Trusted Artificial Intelligence When Blockchain Meets Large Language Models
Oct 10, 2023In recent years, artificial intelligence (AI) and machine learning (ML) are reshaping society's production methods and productivity, and also changing the paradigm of scientific research. Among them, the AI language model represented by ChatGPT has made great progress. Such large language models (LLMs) serve people in the form of AI-generated content (AIGC) and are widely used in consulting, healthcare, and education. However, it is difficult to guarantee the authenticity and reliability of AIGC learning data. In addition, there are also hidden dangers of privacy disclosure in distributed AI training. Moreover, the content generated by LLMs is difficult to identify and trace, and it is difficult to cross-platform mutual recognition. The above information security issues in the coming era of AI powered by LLMs will be infinitely amplified and affect everyone's life. Therefore, we consider empowering LLMs using blockchain technology with superior security features to propose a vision for trusted AI. This paper mainly introduces the motivation and technical route of blockchain for LLM (BC4LLM), including reliable learning corpus, secure training process, and identifiable generated content. Meanwhile, this paper also reviews the potential applications and future challenges, especially in the frontier communication networks field, including network resource allocation, dynamic spectrum sharing, and semantic communication. Based on the above work combined and the prospect of blockchain and LLMs, it is expected to help the early realization of trusted AI and provide guidance for the academic community.
ESCM: An Efficient and Secure Communication Mechanism for UAV Networks
Apr 26, 2023



UAV (unmanned aerial vehicle) is gradually entering various human activities. It has also become an important part of satellite-air-ground-sea integrated network (SAGS) for 6G communication. In order to achieve high mobility, UAV has strict requirements on communication latency, and it cannot be illegally controlled as weapons of attack with malicious intentions. Therefore, an efficient and secure communication method specifically designed for UAV network is required. This paper proposes a communication mechanism named ESCM for the above requirements. For high efficiency of communication, ESCM designs a routing protocol based on artificial bee colony algorithm (ABC) for UAV network to accelerate communication between UAVs. Meanwhile, we plan to use blockchain to guarantee the communication security of UAV networks. However, blockchain has unstable links in high mobility network scenarios, resulting in low consensus efficiency and high communication overhead. Therefore, ESCM also introduces the concept of the digital twin, mapping the UAVs from the physical world into Cyberspace, transforming the UAV network into a static network. And this virtual UAV network is called CyberUAV. Then, in CyberUAV, we design a blockchain system and propose a consensus algorithm based on network coding, named proof of network coding (PoNC). PoNC not only ensures the security of ESCM, but also further improves the performance of ESCM through network coding. Simulation results show that ESCM has obvious advantages in communication efficiency and security. Moreover, encoding messages through PoNC consensus can increase the network throughput, and make mobile blockchain static through digital twin can improve the consensus success rate.
Performance Analysis and Comparison of Non-ideal Wireless PBFT and RAFT Consensus Networks in 6G Communications
Apr 18, 2023Due to advantages in security and privacy, blockchain is considered a key enabling technology to support 6G communications. Practical Byzantine Fault Tolerance (PBFT) and RAFT are seen as the most applicable consensus mechanisms (CMs) in blockchain-enabled wireless networks. However, previous studies on PBFT and RAFT rarely consider the channel performance of the physical layer, such as path loss and channel fading, resulting in research results that are far from real networks. Additionally, 6G communications will widely deploy high-frequency signals such as terahertz (THz) and millimeter wave (mmWave), while performances of PBFT and RAFT are still unknown when these signals are transmitted in wireless PBFT or RAFT networks. Therefore, it is urgent to study the performance of non-ideal wireless PBFT and RAFT networks with THz and mmWave signals, to better make PBFT and RAFT play a role in the 6G era. In this paper, we study and compare the performance of THz and mmWave signals in non-ideal wireless PBFT and RAFT networks, considering Rayleigh Fading (RF) and close-in Free Space (FS) reference distance path loss. Performance is evaluated by five metrics: consensus success rate, latency, throughput, reliability gain, and energy consumption. Meanwhile, we find and derive that there is a maximum distance between two nodes that can make CMs inevitably successful, and it is named the active distance of CMs. The research results not only analyze the performance of non-ideal wireless PBFT and RAFT networks, but also provide important references for the future transmission of THz and mmWave signals in PBFT and RAFT networks.
Performance Analysis of Non-ideal Wireless PBFT Networks with mmWave and Terahertz Signals
Mar 28, 2023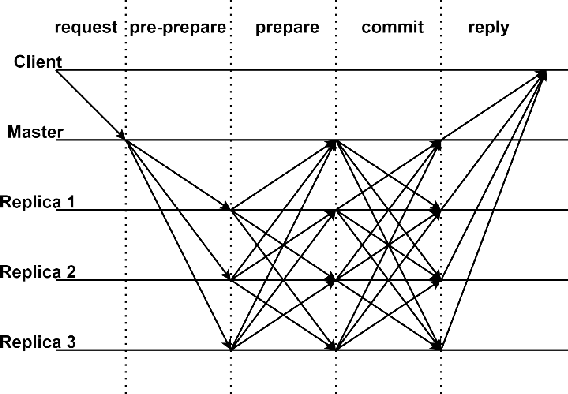
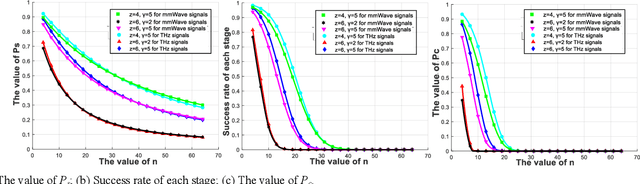
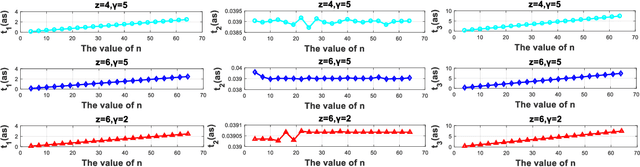
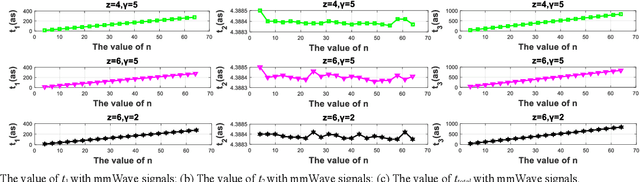
Due to advantages in security and privacy, blockchain is considered a key enabling technology to support 6G communications. Practical Byzantine Fault Tolerance (PBFT) is seen as the most applicable consensus mechanism in blockchain-enabled wireless networks. However, previous studies on PBFT do not consider the channel performance of the physical layer, such as path loss and channel fading, resulting in research results that are far from real networks. Additionally, 6G communications will widely deploy high frequency signals such as millimeter wave (mmWave) and terahertz (THz), while the performance of PBFT is still unknown when these signals are transmitted in wireless PBFT networks. Therefore, it is urgent to study the performance of non-ideal wireless PBFT networks with mmWave and THz siganls, so as to better make PBFT play a role in 6G era. In this paper, we study and compare the performance of mmWave and THz signals in non-ideal wireless PBFT networks, considering Rayleigh Fading (RF) and close-in Free Space (FS) reference distance path loss. Performance is evaluated by consensus success rate and delay. Meanwhile, we find and derive that there is a maximum distance between two nodes that can make PBFT consensus inevitably successful, and it is named active distance of PBFT in this paper. The research results not only analyze the performance of non-ideal wireless PBFT networks, but also provide an important reference for the future transmission of mmWave and THz signals in PBFT networks.