 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRAG-GFM: Overcoming In-Memory Bottlenecks in Graph Foundation Models via Retrieval-Augmented Generation
Jan 24, 2026Graph Foundation Models (GFMs) have emerged as a frontier in graph learning, which are expected to deliver transferable representations across diverse tasks. However, GFMs remain constrained by in-memory bottlenecks: they attempt to encode knowledge into model parameters, which limits semantic capacity, introduces heavy lossy compression with conflicts, and entangles graph representation with the knowledge in ways that hinder efficient adaptation, undermining scalability and interpretability. In this work,we propose RAG-GFM, a Retrieval-Augmented Generation aided Graph Foundation Model that offloads knowledge from parameters and complements parameterized learning. To externalize graph knowledge, we build a dual-modal unified retrieval module, where a semantic store from prefix-structured text and a structural store from centrality-based motif. To preserve heterogeneous information, we design a dual-view alignment objective that contrasts both modalities to capture both content and relational patterns. To enable efficient downstream adaptation, we perform in-context augmentation to enrich supporting instances with retrieved texts and motifs as contextual evidence. Extensive experiments on five benchmark graph datasets demonstrate that RAG-GFM consistently outperforms 13 state-of-the-art baselines in both cross-domain node and graph classification, achieving superior effectiveness and efficiency.
Overcoming In-Memory Bottlenecks in Graph Foundation Models via Retrieval-Augmented Generation
Jan 21, 2026Graph Foundation Models (GFMs) have emerged as a frontier in graph learning, which are expected to deliver transferable representations across diverse tasks. However, GFMs remain constrained by in-memory bottlenecks: they attempt to encode knowledge into model parameters, which limits semantic capacity, introduces heavy lossy compression with conflicts, and entangles graph representation with the knowledge in ways that hinder efficient adaptation, undermining scalability and interpretability. In this work,we propose RAG-GFM, a Retrieval-Augmented Generation aided Graph Foundation Model that offloads knowledge from parameters and complements parameterized learning. To externalize graph knowledge, we build a dual-modal unified retrieval module, where a semantic store from prefix-structured text and a structural store from centrality-based motif. To preserve heterogeneous information, we design a dual-view alignment objective that contrasts both modalities to capture both content and relational patterns. To enable efficient downstream adaptation, we perform in-context augmentation to enrich supporting instances with retrieved texts and motifs as contextual evidence. Extensive experiments on five benchmark graph datasets demonstrate that RAG-GFM consistently outperforms 13 state-of-the-art baselines in both cross-domain node and graph classification, achieving superior effectiveness and efficiency.
Is the Information Bottleneck Robust Enough? Towards Label-Noise Resistant Information Bottleneck Learning
Dec 11, 2025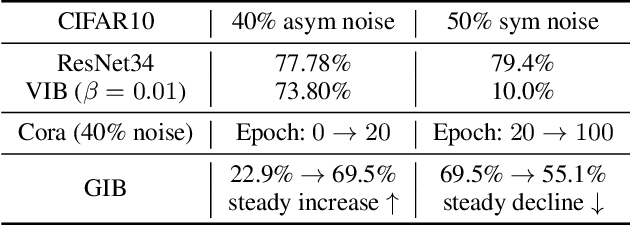
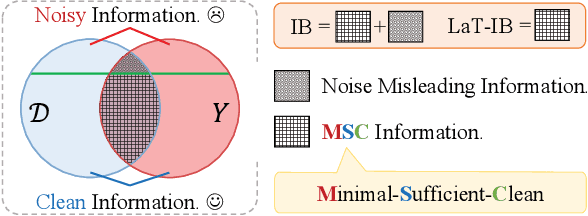
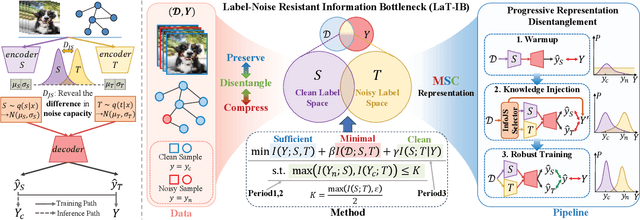
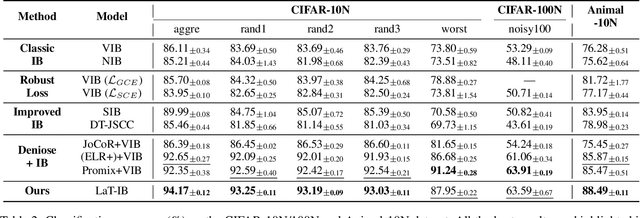
The Information Bottleneck (IB) principle facilitates effective representation learning by preserving label-relevant information while compressing irrelevant information. However, its strong reliance on accurate labels makes it inherently vulnerable to label noise, prevalent in real-world scenarios, resulting in significant performance degradation and overfitting. To address this issue, we propose LaT-IB, a novel Label-Noise ResistanT Information Bottleneck method which introduces a "Minimal-Sufficient-Clean" (MSC) criterion. Instantiated as a mutual information regularizer to retain task-relevant information while discarding noise, MSC addresses standard IB's vulnerability to noisy label supervision. To achieve this, LaT-IB employs a noise-aware latent disentanglement that decomposes the latent representation into components aligned with to the clean label space and the noise space. Theoretically, we first derive mutual information bounds for each component of our objective including prediction, compression, and disentanglement, and moreover prove that optimizing it encourages representations invariant to input noise and separates clean and noisy label information. Furthermore, we design a three-phase training framework: Warmup, Knowledge Injection and Robust Training, to progressively guide the model toward noise-resistant representations. Extensive experiments demonstrate that LaT-IB achieves superior robustness and efficiency under label noise, significantly enhancing robustness and applicability in real-world scenarios with label noise.
GRAVER: Generative Graph Vocabularies for Robust Graph Foundation Models Fine-tuning
Nov 05, 2025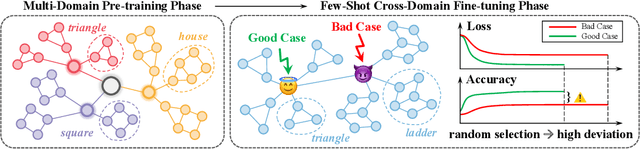
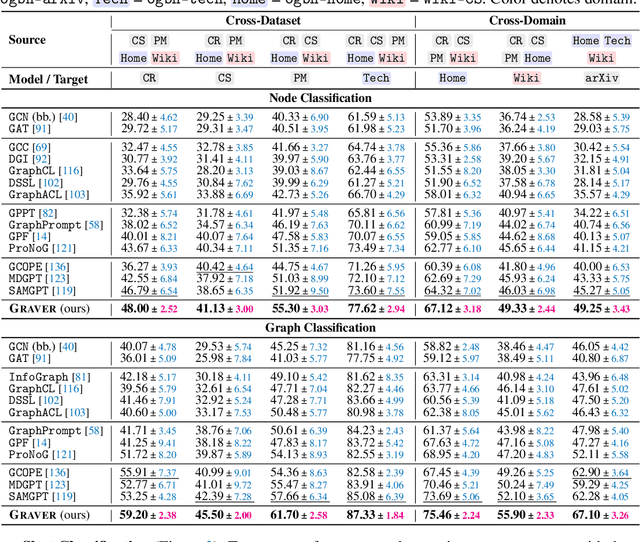
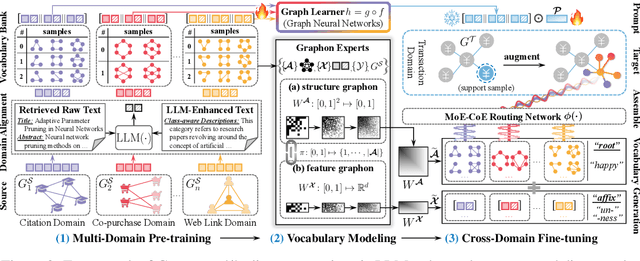
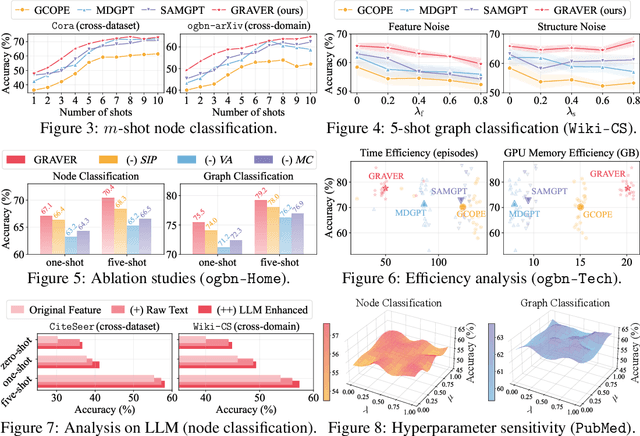
Inspired by the remarkable success of foundation models in language and vision, Graph Foundation Models (GFMs) hold significant promise for broad applicability across diverse graph tasks and domains. However, existing GFMs struggle with unstable few-shot fine-tuning, where both performance and adaptation efficiency exhibit significant fluctuations caused by the randomness in the support sample selection and structural discrepancies between the pre-trained and target graphs. How to fine-tune GFMs robustly and efficiently to enable trustworthy knowledge transfer across domains and tasks is the major challenge. In this paper, we propose GRAVER, a novel Generative gRAph VocabulariEs for Robust GFM fine-tuning framework that tackles the aforementioned instability via generative augmentations. Specifically, to identify transferable units, we analyze and extract key class-specific subgraph patterns by ego-graph disentanglement and validate their transferability both theoretically and empirically. To enable effective pre-training across diverse domains, we leverage a universal task template based on ego-graph similarity and construct graph vocabularies via graphon-based generative experts. To facilitate robust and efficient prompt fine-tuning, we grave the support samples with in-context vocabularies, where the lightweight MoE-CoE network attentively routes knowledge from source domains. Extensive experiments demonstrate the superiority of GRAVER over effectiveness, robustness, and efficiency on downstream few-shot node and graph classification tasks compared with 15 state-of-the-art baselines.
Robust Graph Condensation via Classification Complexity Mitigation
Oct 30, 2025Graph condensation (GC) has gained significant attention for its ability to synthesize smaller yet informative graphs. However, existing studies often overlook the robustness of GC in scenarios where the original graph is corrupted. In such cases, we observe that the performance of GC deteriorates significantly, while existing robust graph learning technologies offer only limited effectiveness. Through both empirical investigation and theoretical analysis, we reveal that GC is inherently an intrinsic-dimension-reducing process, synthesizing a condensed graph with lower classification complexity. Although this property is critical for effective GC performance, it remains highly vulnerable to adversarial perturbations. To tackle this vulnerability and improve GC robustness, we adopt the geometry perspective of graph data manifold and propose a novel Manifold-constrained Robust Graph Condensation framework named MRGC. Specifically, we introduce three graph data manifold learning modules that guide the condensed graph to lie within a smooth, low-dimensional manifold with minimal class ambiguity, thereby preserving the classification complexity reduction capability of GC and ensuring robust performance under universal adversarial attacks. Extensive experiments demonstrate the robustness of \ModelName\ across diverse attack scenarios.
Robust Graph Learning Against Adversarial Evasion Attacks via Prior-Free Diffusion-Based Structure Purification
Feb 07, 2025Adversarial evasion attacks pose significant threats to graph learning, with lines of studies that have improved the robustness of Graph Neural Networks (GNNs). However, existing works rely on priors about clean graphs or attacking strategies, which are often heuristic and inconsistent. To achieve robust graph learning over different types of evasion attacks and diverse datasets, we investigate this problem from a prior-free structure purification perspective. Specifically, we propose a novel Diffusion-based Structure Purification framework named DiffSP, which creatively incorporates the graph diffusion model to learn intrinsic distributions of clean graphs and purify the perturbed structures by removing adversaries under the direction of the captured predictive patterns without relying on priors. DiffSP is divided into the forward diffusion process and the reverse denoising process, during which structure purification is achieved. To avoid valuable information loss during the forward process, we propose an LID-driven nonisotropic diffusion mechanism to selectively inject noise anisotropically. To promote semantic alignment between the clean graph and the purified graph generated during the reverse process, we reduce the generation uncertainty by the proposed graph transfer entropy guided denoising mechanism. Extensive experiments demonstrate the superior robustness of DiffSP against evasion attacks.
Decomposing and Fusing Intra- and Inter-Sensor Spatio-Temporal Signal for Multi-Sensor Wearable Human Activity Recognition
Jan 19, 2025



Wearable Human Activity Recognition (WHAR) is a prominent research area within ubiquitous computing. Multi-sensor synchronous measurement has proven to be more effective for WHAR than using a single sensor. However, existing WHAR methods use shared convolutional kernels for indiscriminate temporal feature extraction across each sensor variable, which fails to effectively capture spatio-temporal relationships of intra-sensor and inter-sensor variables. We propose the DecomposeWHAR model consisting of a decomposition phase and a fusion phase to better model the relationships between modality variables. The decomposition creates high-dimensional representations of each intra-sensor variable through the improved Depth Separable Convolution to capture local temporal features while preserving their unique characteristics. The fusion phase begins by capturing relationships between intra-sensor variables and fusing their features at both the channel and variable levels. Long-range temporal dependencies are modeled using the State Space Model (SSM), and later cross-sensor interactions are dynamically captured through a self-attention mechanism, highlighting inter-sensor spatial correlations. Our model demonstrates superior performance on three widely used WHAR datasets, significantly outperforming state-of-the-art models while maintaining acceptable computational efficiency. Our codes and supplementary materials are available at https://github.com/Anakin2555/DecomposeWHAR.
Discrete Curvature Graph Information Bottleneck
Dec 28, 2024Graph neural networks(GNNs) have been demonstrated to depend on whether the node effective information is sufficiently passing. Discrete curvature (Ricci curvature) is used to study graph connectivity and information propagation efficiency with a geometric perspective, and has been raised in recent years to explore the efficient message-passing structure of GNNs. However, most empirical studies are based on directly observed graph structures or heuristic topological assumptions and lack in-depth exploration of underlying optimal information transport structures for downstream tasks. We suggest that graph curvature optimization is more in-depth and essential than directly rewiring or learning for graph structure with richer message-passing characterization and better information transport interpretability. From both graph geometry and information theory perspectives, we propose the novel Discrete Curvature Graph Information Bottleneck (CurvGIB) framework to optimize the information transport structure and learn better node representations simultaneously. CurvGIB advances the Variational Information Bottleneck (VIB) principle for Ricci curvature optimization to learn the optimal information transport pattern for specific downstream tasks. The learned Ricci curvature is used to refine the optimal transport structure of the graph, and the node representation is fully and efficiently learned. Moreover, for the computational complexity of Ricci curvature differentiation, we combine Ricci flow and VIB to deduce a curvature optimization approximation to form a tractable IB objective function. Extensive experiments on various datasets demonstrate the superior effectiveness and interpretability of CurvGIB.
GraphMoRE: Mitigating Topological Heterogeneity via Mixture of Riemannian Experts
Dec 15, 2024



Real-world graphs have inherently complex and diverse topological patterns, known as topological heterogeneity. Most existing works learn graph representation in a single constant curvature space that is insufficient to match the complex geometric shapes, resulting in low-quality embeddings with high distortion. This also constitutes a critical challenge for graph foundation models, which are expected to uniformly handle a wide variety of diverse graph data. Recent studies have indicated that product manifold gains the possibility to address topological heterogeneity. However, the product manifold is still homogeneous, which is inadequate and inflexible for representing the mixed heterogeneous topology. In this paper, we propose a novel Graph Mixture of Riemannian Experts (GraphMoRE) framework to effectively tackle topological heterogeneity by personalized fine-grained topology geometry pattern preservation. Specifically, to minimize the embedding distortion, we propose a topology-aware gating mechanism to select the optimal embedding space for each node. By fusing the outputs of diverse Riemannian experts with learned gating weights, we construct personalized mixed curvature spaces for nodes, effectively embedding the graph into a heterogeneous manifold with varying curvatures at different points. Furthermore, to fairly measure pairwise distances between different embedding spaces, we present a concise and effective alignment strategy. Extensive experiments on real-world and synthetic datasets demonstrate that our method achieves superior performance with lower distortion, highlighting its potential for modeling complex graphs with topological heterogeneity, and providing a novel architectural perspective for graph foundation models.
DG-Mamba: Robust and Efficient Dynamic Graph Structure Learning with Selective State Space Models
Dec 11, 2024



Dynamic graphs exhibit intertwined spatio-temporal evolutionary patterns, widely existing in the real world. Nevertheless, the structure incompleteness, noise, and redundancy result in poor robustness for Dynamic Graph Neural Networks (DGNNs). Dynamic Graph Structure Learning (DGSL) offers a promising way to optimize graph structures. However, aside from encountering unacceptable quadratic complexity, it overly relies on heuristic priors, making it hard to discover underlying predictive patterns. How to efficiently refine the dynamic structures, capture intrinsic dependencies, and learn robust representations, remains under-explored. In this work, we propose the novel DG-Mamba, a robust and efficient Dynamic Graph structure learning framework with the Selective State Space Models (Mamba). To accelerate the spatio-temporal structure learning, we propose a kernelized dynamic message-passing operator that reduces the quadratic time complexity to linear. To capture global intrinsic dynamics, we establish the dynamic graph as a self-contained system with State Space Model. By discretizing the system states with the cross-snapshot graph adjacency, we enable the long-distance dependencies capturing with the selective snapshot scan. To endow learned dynamic structures more expressive with informativeness, we propose the self-supervised Principle of Relevant Information for DGSL to regularize the most relevant yet least redundant information, enhancing global robustness. Extensive experiments demonstrate the superiority of the robustness and efficiency of our DG-Mamba compared with the state-of-the-art baselines against adversarial attacks.