 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShape-Adaptive Conditional Calibration for Conformal Prediction via Minimax Optimization
Mar 24, 2026Achieving valid conditional coverage in conformal prediction is challenging due to the theoretical difficulty of satisfying pointwise constraints in finite samples. Building upon the characterization of conditional coverage through marginal moment restrictions, we introduce Minimax Optimization Predictive Inference (MOPI), a framework that generalizes prior work by optimizing over a flexible class of set-valued mappings during the calibration phase, rather than simply calibrating a fixed sublevel set. This minimax formulation effectively circumvents the structural constraints of predefined score functions, achieving superior shape adaptivity while maintaining a principled connection to the minimization of mean squared coverage error. Theoretically, we provide non-asymptotic oracle inequalities and show that the convergence rate of the coverage error attains the optimal order under regular conditions. The MOPI also enables valid inference conditional on sensitive attributes that are available during calibration but unobserved at test time. Empirical results on complex, non-standard conditional distributions demonstrate that MOPI produces more efficient prediction sets than existing baselines.
Environment-Aware Adaptive Pruning with Interleaved Inference Orchestration for Vision-Language-Action Models
Jan 31, 2026While Vision-Language-Action (VLA) models hold promise in embodied intelligence, their large parameter counts lead to substantial inference latency that hinders real-time manipulation, motivating parameter sparsification. However, as the environment evolves during VLA execution, the optimal sparsity patterns change accordingly. Static pruning lacks the adaptability required for environment dynamics, whereas fixed-interval dynamic layer pruning suffers from coarse granularity and high retraining overheads. To bridge this gap, we propose EcoVLA, a training-free, plug-and-play adaptive pruning framework that supports orthogonal combination with existing VLA acceleration methods. EcoVLA comprises two components: Environment-aware Adaptive Pruning (EAP) and Interleaved Inference Orchestration ($I^2O$). EAP is a lightweight adaptive channel pruning method that incorporates the temporal consistency of the physical environment to update sparsity patterns. $I^2O$ leverages the FLOPs bubbles inherent in VLA inference to schedule the pruning method in parallel, ensuring negligible impact on latency. Evaluated on diverse VLA models and benchmarks, EcoVLA delivers state-of-the-art performance, achieving up to 1.60$\times$ speedup with only a 0.4% drop in success rate, and further reaches 2.18$\times$ speedup with only a 0.5% degradation when combined with token pruning. We further validate the effectiveness of EcoVLA on real-world robots.
Aggregating Conformal Prediction Sets via α-Allocation
Nov 15, 2025Conformal prediction offers a distribution-free framework for constructing prediction sets with finite-sample coverage. Yet, efficiently leveraging multiple conformity scores to reduce prediction set size remains a major open challenge. Instead of selecting a single best score, this work introduces a principled aggregation strategy, COnfidence-Level Allocation (COLA), that optimally allocates confidence levels across multiple conformal prediction sets to minimize empirical set size while maintaining provable coverage. Two variants are further developed, COLA-s and COLA-f, which guarantee finite-sample marginal coverage via sample splitting and full conformalization, respectively. In addition, we develop COLA-l, an individualized allocation strategy that promotes local size efficiency while achieving asymptotic conditional coverage. Extensive experiments on synthetic and real-world datasets demonstrate that COLA achieves considerably smaller prediction sets than state-of-the-art baselines while maintaining valid coverage.
Feedback-Enhanced Online Multiple Testing with Applications to Conformal Selection
Sep 03, 2025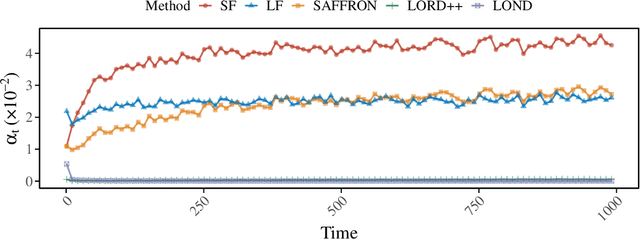
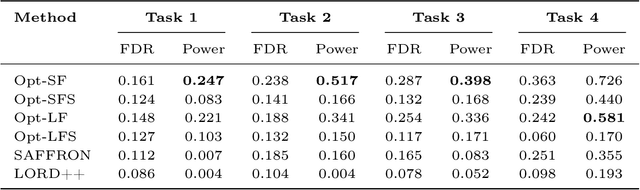
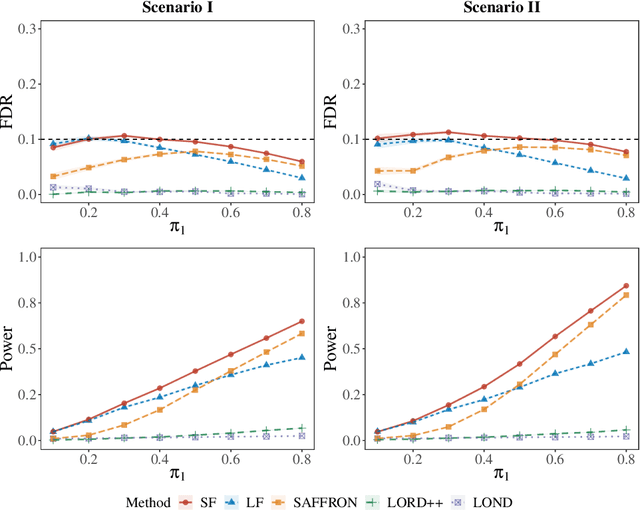
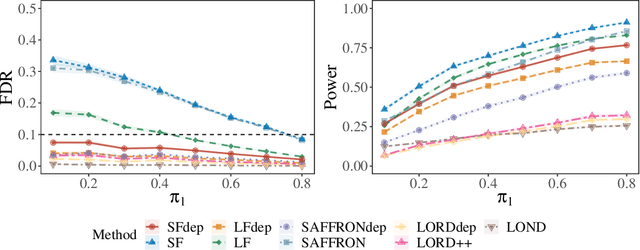
We study online multiple testing with feedback, where decisions are made sequentially and the true state of the hypothesis is revealed after the decision has been made, either instantly or with a delay. We propose GAIF, a feedback-enhanced generalized alpha-investing framework that dynamically adjusts thresholds using revealed outcomes, ensuring finite-sample false discovery rate (FDR)/marginal FDR control. Extending GAIF to online conformal testing, we construct independent conformal $p$-values and introduce a feedback-driven model selection criterion to identify the best model/score, thereby improving statistical power. We demonstrate the effectiveness of our methods through numerical simulations and real-data applications.
ElectricSight: 3D Hazard Monitoring for Power Lines Using Low-Cost Sensors
May 10, 2025Protecting power transmission lines from potential hazards involves critical tasks, one of which is the accurate measurement of distances between power lines and potential threats, such as large cranes. The challenge with this task is that the current sensor-based methods face challenges in balancing accuracy and cost in distance measurement. A common practice is to install cameras on transmission towers, which, however, struggle to measure true 3D distances due to the lack of depth information. Although 3D lasers can provide accurate depth data, their high cost makes large-scale deployment impractical. To address this challenge, we present ElectricSight, a system designed for 3D distance measurement and monitoring of potential hazards to power transmission lines. This work's key innovations lie in both the overall system framework and a monocular depth estimation method. Specifically, the system framework combines real-time images with environmental point cloud priors, enabling cost-effective and precise 3D distance measurements. As a core component of the system, the monocular depth estimation method enhances the performance by integrating 3D point cloud data into image-based estimates, improving both the accuracy and reliability of the system. To assess ElectricSight's performance, we conducted tests with data from a real-world power transmission scenario. The experimental results demonstrate that ElectricSight achieves an average accuracy of 1.08 m for distance measurements and an early warning accuracy of 92%.
Conformal Prediction with Cellwise Outliers: A Detect-then-Impute Approach
May 08, 2025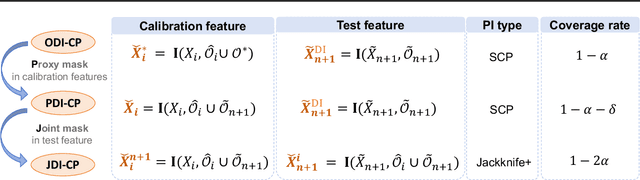
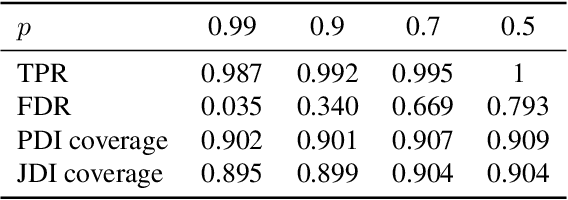
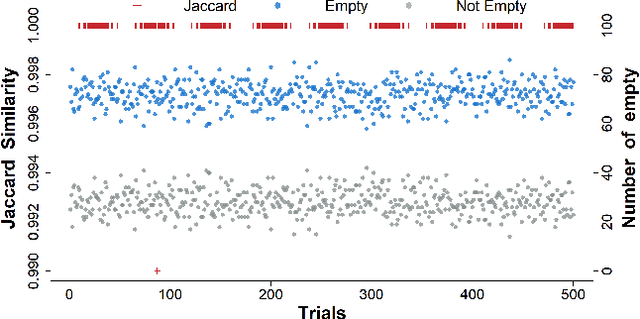
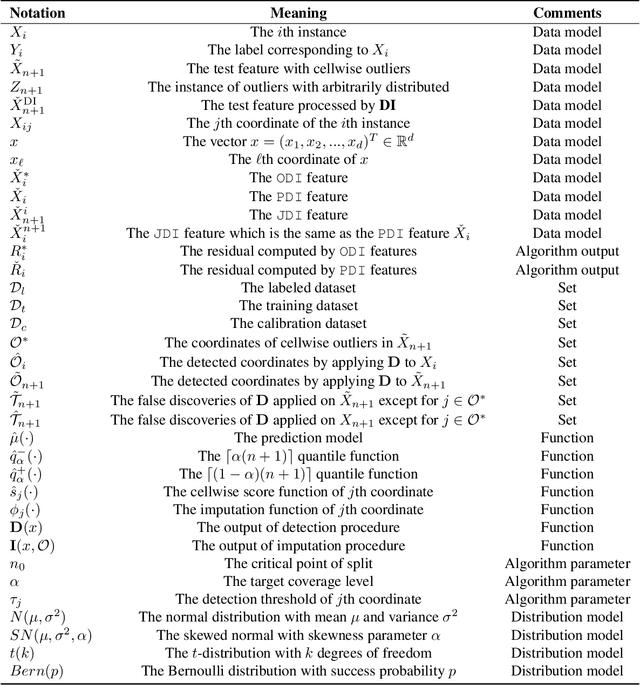
Conformal prediction is a powerful tool for constructing prediction intervals for black-box models, providing a finite sample coverage guarantee for exchangeable data. However, this exchangeability is compromised when some entries of the test feature are contaminated, such as in the case of cellwise outliers. To address this issue, this paper introduces a novel framework called detect-then-impute conformal prediction. This framework first employs an outlier detection procedure on the test feature and then utilizes an imputation method to fill in those cells identified as outliers. To quantify the uncertainty in the processed test feature, we adaptively apply the detection and imputation procedures to the calibration set, thereby constructing exchangeable features for the conformal prediction interval of the test label. We develop two practical algorithms, PDI-CP and JDI-CP, and provide a distribution-free coverage analysis under some commonly used detection and imputation procedures. Notably, JDI-CP achieves a finite sample $1-2\alpha$ coverage guarantee. Numerical experiments on both synthetic and real datasets demonstrate that our proposed algorithms exhibit robust coverage properties and comparable efficiency to the oracle baseline.
CORP: A Multi-Modal Dataset for Campus-Oriented Roadside Perception Tasks
Apr 04, 2024



Numerous roadside perception datasets have been introduced to propel advancements in autonomous driving and intelligent transportation systems research and development. However, it has been observed that the majority of their concentrates is on urban arterial roads, inadvertently overlooking residential areas such as parks and campuses that exhibit entirely distinct characteristics. In light of this gap, we propose CORP, which stands as the first public benchmark dataset tailored for multi-modal roadside perception tasks under campus scenarios. Collected in a university campus, CORP consists of over 205k images plus 102k point clouds captured from 18 cameras and 9 LiDAR sensors. These sensors with different configurations are mounted on roadside utility poles to provide diverse viewpoints within the campus region. The annotations of CORP encompass multi-dimensional information beyond 2D and 3D bounding boxes, providing extra support for 3D seamless tracking and instance segmentation with unique IDs and pixel masks for identifying targets, to enhance the understanding of objects and their behaviors distributed across the campus premises. Unlike other roadside datasets about urban traffic, CORP extends the spectrum to highlight the challenges for multi-modal perception in campuses and other residential areas.
CAS: A General Algorithm for Online Selective Conformal Prediction with FCR Control
Mar 12, 2024We study the problem of post-selection predictive inference in an online fashion. To avoid devoting resources to unimportant units, a preliminary selection of the current individual before reporting its prediction interval is common and meaningful in online predictive tasks. Since the online selection causes a temporal multiplicity in the selected prediction intervals, it is important to control the real-time false coverage-statement rate (FCR) to measure the averaged miscoverage error. We develop a general framework named CAS (Calibration after Adaptive Selection) that can wrap around any prediction model and online selection rule to output post-selection prediction intervals. If the current individual is selected, we first perform an adaptive selection on historical data to construct a calibration set, then output a conformal prediction interval for the unobserved label. We provide tractable constructions for the calibration set for popular online selection rules. We proved that CAS can achieve an exact selection-conditional coverage guarantee in the finite-sample and distribution-free regimes. For the decision-driven selection rule, including most online multiple-testing procedures, CAS can exactly control the real-time FCR below the target level without any distributional assumptions. For the online selection with symmetric thresholds, we establish the error bound for the control gap of FCR under mild distributional assumptions. To account for the distribution shift in online data, we also embed CAS into some recent dynamic conformal prediction methods and examine the long-run FCR control. Numerical results on both synthetic and real data corroborate that CAS can effectively control FCR around the target level and yield more narrowed prediction intervals over existing baselines across various settings.
EdgeCalib: Multi-Frame Weighted Edge Features for Automatic Targetless LiDAR-Camera Calibration
Oct 25, 2023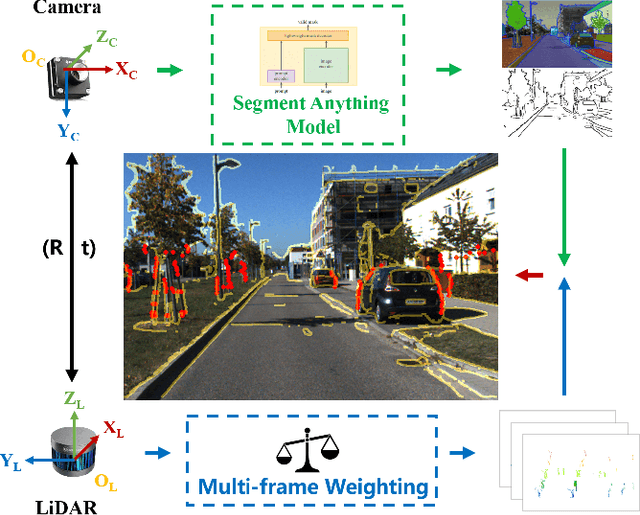
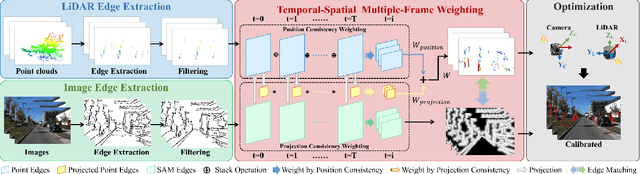
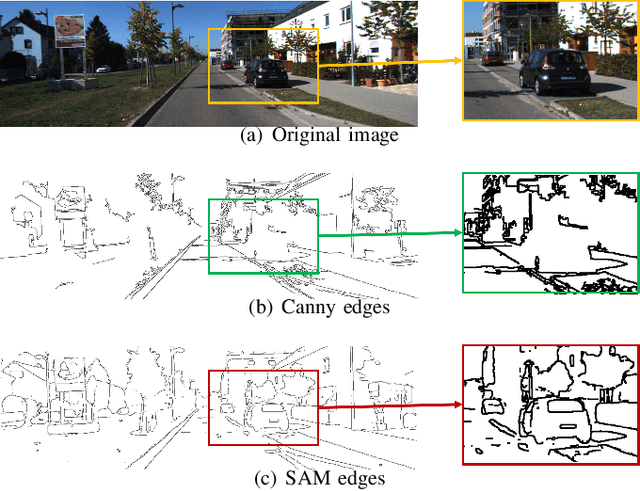
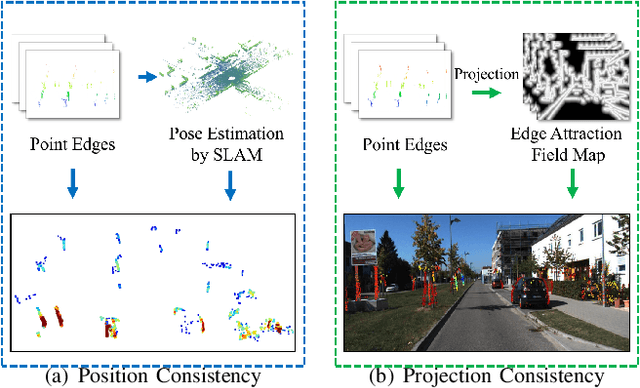
In multimodal perception systems, achieving precise extrinsic calibration between LiDAR and camera is of critical importance. Previous calibration methods often required specific targets or manual adjustments, making them both labor-intensive and costly. Online calibration methods based on features have been proposed, but these methods encounter challenges such as imprecise feature extraction, unreliable cross-modality associations, and high scene-specific requirements. To address this, we introduce an edge-based approach for automatic online calibration of LiDAR and cameras in real-world scenarios. The edge features, which are prevalent in various environments, are aligned in both images and point clouds to determine the extrinsic parameters. Specifically, stable and robust image edge features are extracted using a SAM-based method and the edge features extracted from the point cloud are weighted through a multi-frame weighting strategy for feature filtering. Finally, accurate extrinsic parameters are optimized based on edge correspondence constraints. We conducted evaluations on both the KITTI dataset and our dataset. The results show a state-of-the-art rotation accuracy of 0.086{\deg} and a translation accuracy of 0.977 cm, outperforming existing edge-based calibration methods in both precision and robustness.
TrajMatch: Towards Automatic Spatio-temporal Calibration for Roadside LiDARs through Trajectory Matching
Feb 04, 2023



Recently, it has become popular to deploy sensors such as LiDARs on the roadside to monitor the passing traffic and assist autonomous vehicle perception. Unlike autonomous vehicle systems, roadside sensors are usually affiliated with different subsystems and lack synchronization both in time and space. Calibration is a key technology which allows the central server to fuse the data generated by different location infrastructures, which can deliver improve the sensing range and detection robustness. Unfortunately, existing calibration algorithms often assume that the LiDARs are significantly overlapped or that the temporal calibration is already achieved. Since these assumptions do not always hold in the real world, the calibration results from the existing algorithms are often unsatisfactory and always need human involvement, which brings high labor costs. In this paper, we propose TrajMatch -- the first system that can automatically calibrate for roadside LiDARs in both time and space. The main idea is to automatically calibrate the sensors based on the result of the detection/tracking task instead of extracting special features. More deeply, we propose a mechanism for evaluating calibration parameters that is consistent with our algorithm, and we demonstrate the effectiveness of this scheme experimentally, which can also be used to guide parameter iterations for multiple calibration. Finally, to evaluate the performance of TrajMatch , we collect two dataset, one simulated dataset LiDARnet-sim 1.0 and a real-world dataset. Experiment results show that TrajMatch can achieve a spatial calibration error of less than 10cm and a temporal calibration error of less than 1.5ms.