 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSwordsman: Entropy-Driven Adaptive Block Partition for Efficient Diffusion Language Models
Feb 04, 2026Block-wise decoding effectively improves the inference speed and quality in diffusion language models (DLMs) by combining inter-block sequential denoising and intra-block parallel unmasking. However, existing block-wise decoding methods typically partition blocks in a rigid and fixed manner, which inevitably fragments complete semantic or syntactic constituents, leading to suboptimal performance. Inspired by the entropy reduction hypothesis (ERH), we recognize that constituent boundaries offer greater opportunities for uncertainty reduction, which motivates us to employ entropy analysis for identifying constituent boundaries. Therefore, we propose Swordsman, an entropy-driven adaptive block-wise decoding framework for DLMs. Swordsman adaptively partitions blocks by identifying entropy shifts between adjacent tokens to better align with semantic or syntactic constituent boundaries. In addition, Swordsman dynamically adjusts unmasking thresholds conditioned on the real-time unmasking status within a block, further improving both efficiency and stability. As a training-free framework, supported by KV Cache, Swordsman demonstrates state-of-the-art performance across extensive evaluations.
SOP: A Scalable Online Post-Training System for Vision-Language-Action Models
Jan 06, 2026Vision-language-action (VLA) models achieve strong generalization through large-scale pre-training, but real-world deployment requires expert-level task proficiency in addition to broad generality. Existing post-training approaches for VLA models are typically offline, single-robot, or task-specific, limiting effective on-policy adaptation and scalable learning from real-world interaction. We introduce a Scalable Online Post-training (SOP) system that enables online, distributed, multi-task post-training of generalist VLA models directly in the physical world. SOP tightly couples execution and learning through a closed-loop architecture in which a fleet of robots continuously streams on-policy experience and human intervention signals to a centralized cloud learner, and asynchronously receives updated policies. This design supports prompt on-policy correction, scales experience collection through parallel deployment, and preserves generality during adaptation. SOP is agnostic to the choice of post-training algorithm; we instantiate it with both interactive imitation learning (HG-DAgger) and reinforcement learning (RECAP). Across a range of real-world manipulation tasks including cloth folding, box assembly, and grocery restocking, we show that SOP substantially improves the performance of large pretrained VLA models while maintaining a single shared policy across tasks. Effective post-training can be achieved within hours of real-world interaction, and performance scales near-linearly with the number of robots in the fleet. These results suggest that tightly coupling online learning with fleet-scale deployment is instrumental to enabling efficient, reliable, and scalable post-training of generalist robot policies in the physical world.
Enhancing Text-to-Image Diffusion Transformer via Split-Text Conditioning
May 25, 2025Current text-to-image diffusion generation typically employs complete-text conditioning. Due to the intricate syntax, diffusion transformers (DiTs) inherently suffer from a comprehension defect of complete-text captions. One-fly complete-text input either overlooks critical semantic details or causes semantic confusion by simultaneously modeling diverse semantic primitive types. To mitigate this defect of DiTs, we propose a novel split-text conditioning framework named DiT-ST. This framework converts a complete-text caption into a split-text caption, a collection of simplified sentences, to explicitly express various semantic primitives and their interconnections. The split-text caption is then injected into different denoising stages of DiT-ST in a hierarchical and incremental manner. Specifically, DiT-ST leverages Large Language Models to parse captions, extracting diverse primitives and hierarchically sorting out and constructing these primitives into a split-text input. Moreover, we partition the diffusion denoising process according to its differential sensitivities to diverse semantic primitive types and determine the appropriate timesteps to incrementally inject tokens of diverse semantic primitive types into input tokens via cross-attention. In this way, DiT-ST enhances the representation learning of specific semantic primitive types across different stages. Extensive experiments validate the effectiveness of our proposed DiT-ST in mitigating the complete-text comprehension defect.
Pre-Deployment Testing of Low Speed, Urban Road Autonomous Driving in a Simulated Environment
Jun 01, 2023



Low speed autonomous shuttles emulating SAE Level L4 automated driving using human driver assisted autonomy have been operating in geo-fenced areas in several cities in the US and the rest of the world. These autonomous vehicles (AV) are operated by small to mid-sized technology companies that do not have the resources of automotive OEMs for carrying out exhaustive, comprehensive testing of their AV technology solutions before public road deployment. Due to the low speed of operation and hence not operating on roads containing highways, the base vehicles of these AV shuttles are not required to go through rigorous certification tests. The way the driver assisted AV technology is tested and allowed for public road deployment is continuously evolving but is not standardized and shows differences between the different states where these vehicles operate. Currently, AVs and AV shuttles deployed on public roads are using these deployments for testing and improving their technology. However, this is not the right approach. Safe and extensive testing in a lab and controlled test environment including Model-in-the-Loop (MiL), Hardware-in-the-Loop (HiL) and Autonomous-Vehicle-in-the-Loop (AViL) testing should be the prerequisite to such public road deployments. This paper presents three dimensional virtual modeling of an AV shuttle deployment site and simulation testing in this virtual environment. We have two deployment sites in Columbus of these AV shuttles through the Department of Transportation funded Smart City Challenge project named Smart Columbus. The Linden residential area AV shuttle deployment site of Smart Columbus is used as the specific example for illustrating the AV testing method proposed in this paper.
Decision Making for Autonomous Vehicles
Apr 27, 2023



This paper is on decision making of autonomous vehicles for handling roundabouts. The round intersection is introduced first followed by the Markov Decision Processes (MDP), the Partially Observable Markov Decision Processes (POMDP) and the Object Oriented Partially Observable Markov Decision Process (OOPOMDP). The Partially Observable Monte-Carlo Planning algorihtm (POMCP) algorithm is introduced and OOPOMDP is applied to decision making for autonomous vehicles in round intersections. Decision making is formulated as a POMDP problem and the penalty function is formulated and set followed by improvement of decision making with policy prediction. The augmented objective state and policy based state transition is introduced simulations are used to demonstrate the effectiveness of the proposed method.
Vehicle State Estimation and Prediction
Apr 25, 2023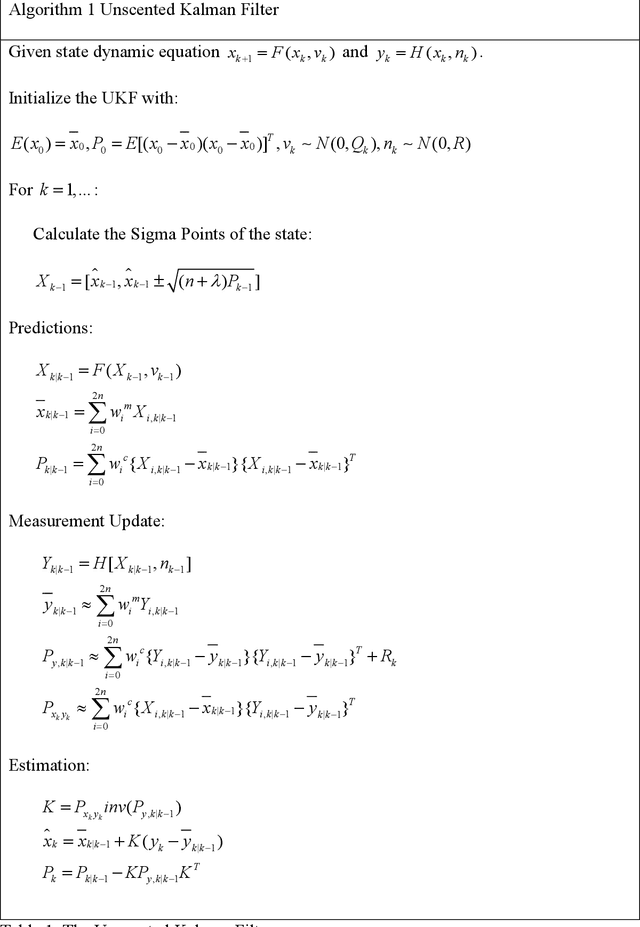
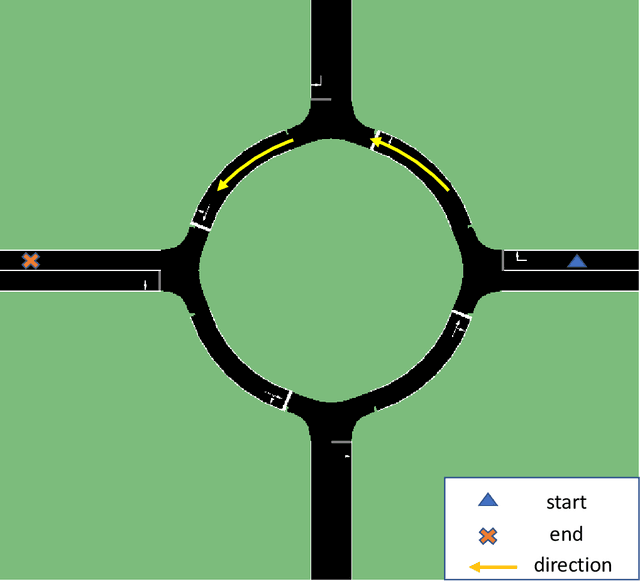
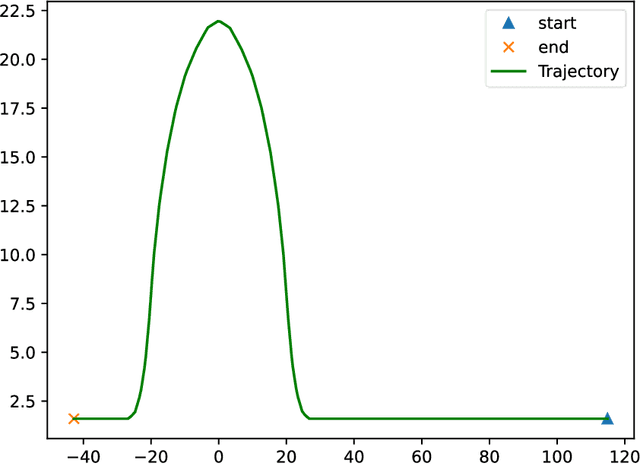
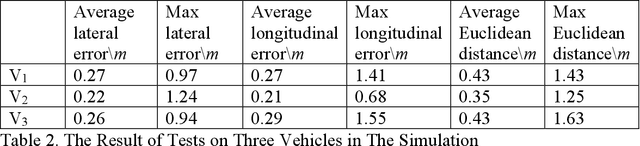
This paper presents methods for vehicle state estimation and prediction for autonomous driving. A roundabout is chosen to apply the methods and illustrate the results as autonomous vehicles have difficulty in handling roundabouts. State estimation based on the unscented Kalman filter (UKF) is introduced first with application to a roundabout. The microscopic traffic simulator SUMO is used to generate realistic traffic in the roundabout for the simulation experiments. Change point detection based driving behavior prediction using a multi policy approach is then introduced and evaluated for the round intersection example. Finally, these methods are combined for vehicle trajectory estimation based on UKF and policy prediction and demonstrated using the roundabout example.
TrajMatch: Towards Automatic Spatio-temporal Calibration for Roadside LiDARs through Trajectory Matching
Feb 04, 2023



Recently, it has become popular to deploy sensors such as LiDARs on the roadside to monitor the passing traffic and assist autonomous vehicle perception. Unlike autonomous vehicle systems, roadside sensors are usually affiliated with different subsystems and lack synchronization both in time and space. Calibration is a key technology which allows the central server to fuse the data generated by different location infrastructures, which can deliver improve the sensing range and detection robustness. Unfortunately, existing calibration algorithms often assume that the LiDARs are significantly overlapped or that the temporal calibration is already achieved. Since these assumptions do not always hold in the real world, the calibration results from the existing algorithms are often unsatisfactory and always need human involvement, which brings high labor costs. In this paper, we propose TrajMatch -- the first system that can automatically calibrate for roadside LiDARs in both time and space. The main idea is to automatically calibrate the sensors based on the result of the detection/tracking task instead of extracting special features. More deeply, we propose a mechanism for evaluating calibration parameters that is consistent with our algorithm, and we demonstrate the effectiveness of this scheme experimentally, which can also be used to guide parameter iterations for multiple calibration. Finally, to evaluate the performance of TrajMatch , we collect two dataset, one simulated dataset LiDARnet-sim 1.0 and a real-world dataset. Experiment results show that TrajMatch can achieve a spatial calibration error of less than 10cm and a temporal calibration error of less than 1.5ms.
Simulation Environment for Safety Assessment of CEAV Deployment in Linden
Dec 18, 2020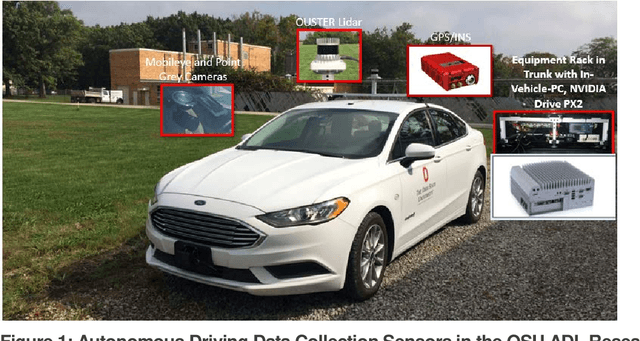


This report presents a simulation environment for pre-deployment testing of the autonomous shuttles that will operate in the Linden Residential Area. An autonomous shuttle deployment was already successfully launched and operated in the city of Columbus and ended recently. This report focuses on the second autonomous shuttle deployment planned to start in December, 2019, using a route that will help to solve first-mile / last-mile mobility challenges in the Linden neighborhood of Columbus by providing free rides between St. Stephens Community House, Douglas Community Recreation Center, Rosewind Resident Council and Linden Transit Center. This document presents simulation testing environments in two open source simulators and a commercial simulator for this residential area route and how they can be used for model-in-the-loop and hardware-in-the-loop simulation testing of autonomous shuttle operation before the actual deployment.