 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePre-Deployment Testing of Low Speed, Urban Road Autonomous Driving in a Simulated Environment
Jun 01, 2023



Low speed autonomous shuttles emulating SAE Level L4 automated driving using human driver assisted autonomy have been operating in geo-fenced areas in several cities in the US and the rest of the world. These autonomous vehicles (AV) are operated by small to mid-sized technology companies that do not have the resources of automotive OEMs for carrying out exhaustive, comprehensive testing of their AV technology solutions before public road deployment. Due to the low speed of operation and hence not operating on roads containing highways, the base vehicles of these AV shuttles are not required to go through rigorous certification tests. The way the driver assisted AV technology is tested and allowed for public road deployment is continuously evolving but is not standardized and shows differences between the different states where these vehicles operate. Currently, AVs and AV shuttles deployed on public roads are using these deployments for testing and improving their technology. However, this is not the right approach. Safe and extensive testing in a lab and controlled test environment including Model-in-the-Loop (MiL), Hardware-in-the-Loop (HiL) and Autonomous-Vehicle-in-the-Loop (AViL) testing should be the prerequisite to such public road deployments. This paper presents three dimensional virtual modeling of an AV shuttle deployment site and simulation testing in this virtual environment. We have two deployment sites in Columbus of these AV shuttles through the Department of Transportation funded Smart City Challenge project named Smart Columbus. The Linden residential area AV shuttle deployment site of Smart Columbus is used as the specific example for illustrating the AV testing method proposed in this paper.
Simulation Environment for Safety Assessment of CEAV Deployment in Linden
Dec 18, 2020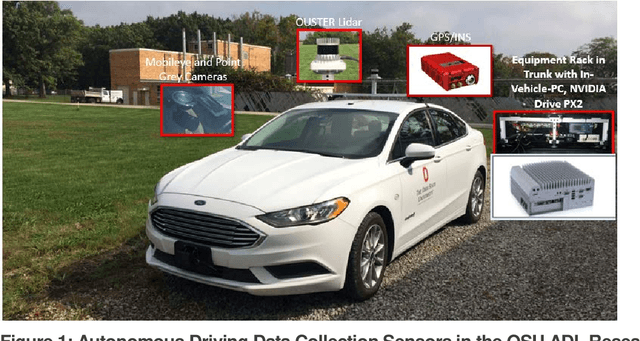


This report presents a simulation environment for pre-deployment testing of the autonomous shuttles that will operate in the Linden Residential Area. An autonomous shuttle deployment was already successfully launched and operated in the city of Columbus and ended recently. This report focuses on the second autonomous shuttle deployment planned to start in December, 2019, using a route that will help to solve first-mile / last-mile mobility challenges in the Linden neighborhood of Columbus by providing free rides between St. Stephens Community House, Douglas Community Recreation Center, Rosewind Resident Council and Linden Transit Center. This document presents simulation testing environments in two open source simulators and a commercial simulator for this residential area route and how they can be used for model-in-the-loop and hardware-in-the-loop simulation testing of autonomous shuttle operation before the actual deployment.