 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh Order Control Lyapunov Function - Control Barrier Function - Quadratic Programming Based Autonomous Driving Controller for Bicyclist Safety
Dec 14, 2025Ensuring the safety of Vulnerable Road Users (VRUs) is a critical challenge in the development of advanced autonomous driving systems in smart cities. Among vulnerable road users, bicyclists present unique characteristics that make their safety both critical and also manageable. Vehicles often travel at significantly higher relative speeds when interacting with bicyclists as compared to their interactions with pedestrians which makes collision avoidance system design for bicyclist safety more challenging. Yet, bicyclist movements are generally more predictable and governed by clear traffic rules as compared to the sudden and sometimes erratic pedestrian motion, offering opportunities for model-based control strategies. To address bicyclist safety in complex traffic environments, this study proposes and develops a High Order Control Lyapunov Function High Order Control Barrier Function Quadratic Programming (HOCLF HOCBF QP) control framework. Through this framework, CLFs constraints guarantee system stability so that the vehicle can track its reference trajectory, whereas CBFs constraints ensure system safety by letting vehicle avoiding potential collisions region with surrounding obstacles. Then by solving a QP problem, an optimal control command that simultaneously satisfies stability and safety requirements can be calculated. Three key bicyclist crash scenarios recorded in the Fatality Analysis Reporting System (FARS) are recreated and used to comprehensively evaluate the proposed autonomous driving bicyclist safety control strategy in a simulation study. Simulation results demonstrate that the HOCLF HOCBF QP controller can help the vehicle perform robust, and collision-free maneuvers, highlighting its potential for improving bicyclist safety in complex traffic environments.
Modified Hybrid A* Collision-Free Path-Planning for Automated Reverse Parking
Dec 12, 2025



Parking a vehicle in tight spaces is a challenging task to perform due to the scarcity of feasible paths that are also collision-free. This paper presents a strategy to tackle this kind of maneuver with a modified Hybrid-A* path-planning algorithm that combines the feasibility guarantee inherent in the standard Hybrid A* algorithm with the addition of static obstacle collision avoidance. A kinematic single-track model is derived to describe the low-speed motion of the vehicle, which is subsequently used as the motion model in the Hybrid A* path-planning algorithm to generate feasible motion primitive branches. The model states are also used to reconstruct the vehicle centerline, which, in conjunction with an inflated binary occupancy map, facilitates static obstacle collision avoidance functions. Simulation study and animation are set up to test the efficacy of the approach, and the proposed algorithm proves to consistently provide kinematically feasible trajectories that are also collision-free.
Vehicle-in-Virtual-Environment Method for ADAS and Connected and Automated Driving Function Development/Demonstration/Evaluation
Oct 05, 2024



The current approach for new Advanced Driver Assistance System (ADAS) and Connected and Automated Driving (CAD) function development involves a significant amount of public road testing which is inefficient due to the number miles that need to be driven for rare and extreme events to take place, thereby being very costly also, and unsafe as the rest of the road users become involuntary test subjects. A new development, evaluation and demonstration method for safe, efficient, and repeatable development, demonstration and evaluation of ADAS and CAD functions called VehicleInVirtualEnvironment (VVE) was recently introduced as a solution to this problem. The vehicle is operated in a large, empty, and flat area during VVE while its localization and perception sensor data is fed from the virtual environment with other traffic and rare and extreme events being generated as needed. The virtual environment can be easily configured and modified to construct different testing scenarios on demand. This paper focuses on the VVE approach and introduces the coordinate transformations needed to sync pose (location and orientation) in the virtual and physical worlds and handling of localization and perception sensor data using the highly realistic 3D simulation model of a recent autonomous shuttle deployment site in Columbus, Ohio as the virtual world. As a further example that uses multiple actors, the use of VVE for VehicleToVRU communication based Vulnerable Road User (VRU) safety is presented in the paper using VVE experiments and real pedestrian(s) in a safe and repeatable manner. VVE experiments are used to demonstrate the efficacy of the method.
Feasibility of Local Trajectory Planning for Level-2+ Semi-autonomous Driving without Absolute Localization
Sep 06, 2023



Autonomous driving has long grappled with the need for precise absolute localization, making full autonomy elusive and raising the capital entry barriers for startups. This study delves into the feasibility of local trajectory planning for level-2+ (L2+) semi-autonomous vehicles without the dependence on accurate absolute localization. Instead, we emphasize the estimation of the pose change between consecutive planning frames from motion sensors and integration of relative locations of traffic objects to the local planning problem under the ego car's local coordinate system, therefore eliminating the need for an absolute localization. Without the availability of absolute localization for correction, the measurement errors of speed and yaw rate greatly affect the estimation accuracy of the relative pose change between frames. We proved that the feasibility/stability of the continuous planning problem under such motion sensor errors can be guaranteed at certain defined conditions. This was achieved by formulating it as a Lyapunov-stability analysis problem. Moreover, a simulation pipeline was developed to further validate the proposed local planning method. Simulations were conducted at two traffic scenes with different error settings for speed and yaw rate measurements. The results substantiate the proposed framework's functionality even under relatively inferior sensor errors. We also experiment the stability limits of the planned results under abnormally larger motion sensor errors. The results provide a good match to the previous theoretical analysis. Our findings suggested that precise absolute localization may not be the sole path to achieving reliable trajectory planning, eliminating the necessity for high-accuracy dual-antenna GPS as well as the high-fidelity maps for SLAM localization.
Vehicle-in-Virtual-Environment (VVE)
May 25, 2023The current approach to connected and autonomous driving function development and evaluation uses model-in-the-loop simulation, hardware-in-the-loop simulation, and limited proving ground work followed by public road deployment of beta version of software and technology. The rest of the road users are involuntarily forced into taking part in the development and evaluation of these connected and autonomous driving functions in this approach. This is an unsafe, costly and inefficient method. Motivated by these shortcomings, this paper introduces the Vehicle-in-Virtual-Environment (VVE) method of safe, efficient and low cost connected and autonomous driving function development, evaluation and demonstration. The VVE method is compared to the existing state-of-the-art. Its basic implementation for a path following task is used to explain the method where the actual autonomous vehicle operates in a large empty area with its sensor feeds being replaced by realistic sensor feeds corresponding to its location and pose in the virtual environment. It is possible to easily change the development virtual environment and inject rare and difficult events which can be tested very safely. Vehicle-to-Pedestrian (V2P) communication based pedestrian safety is chosen as the application use case for VVE and corresponding experimental results are presented and discussed. It is noted that actual pedestrians and other vulnerable road users can be used very safely in this approach.
Automated Driving Architecture and Operation of a Light Commercial Vehicle
May 24, 2023



This paper is on the automated driving architecture and operation of a light commercial vehicle. Simple longitudinal and lateral dynamic models of the vehicle and a more detailed CarSim model are developed and used in simulations and controller design and evaluation. Experimental validation is used to make sure that the models used represent the actual response of the vehicle as closely as possible. The vehicle is made drive-by-wire by interfacing with the existing throttle-by-wire, by adding an active vacuum booster for brake-by-wire and by adding a steering actuator for steer-by-wire operation. Vehicle localization is achieved by using a GPS sensor integrated with six axes IMU with a built-in INS algorithm and a digital compass for heading information. Front looking radar, lidar and camera are used for environmental sensing. Communication with the road infrastructure and other vehicles is made possible by a vehicle to vehicle communication modem. A dedicated computer under real time Linux is used to collect, process and distribute sensor information. A dSPACE MicroAutoBox is used for drive-by-wire controls. CACC based longitudinal control and path tracking of a map of GPS waypoints are used to present the operation of this automated driving vehicle.
Decision Making for Autonomous Vehicles
Apr 27, 2023



This paper is on decision making of autonomous vehicles for handling roundabouts. The round intersection is introduced first followed by the Markov Decision Processes (MDP), the Partially Observable Markov Decision Processes (POMDP) and the Object Oriented Partially Observable Markov Decision Process (OOPOMDP). The Partially Observable Monte-Carlo Planning algorihtm (POMCP) algorithm is introduced and OOPOMDP is applied to decision making for autonomous vehicles in round intersections. Decision making is formulated as a POMDP problem and the penalty function is formulated and set followed by improvement of decision making with policy prediction. The augmented objective state and policy based state transition is introduced simulations are used to demonstrate the effectiveness of the proposed method.
Vehicle State Estimation and Prediction
Apr 25, 2023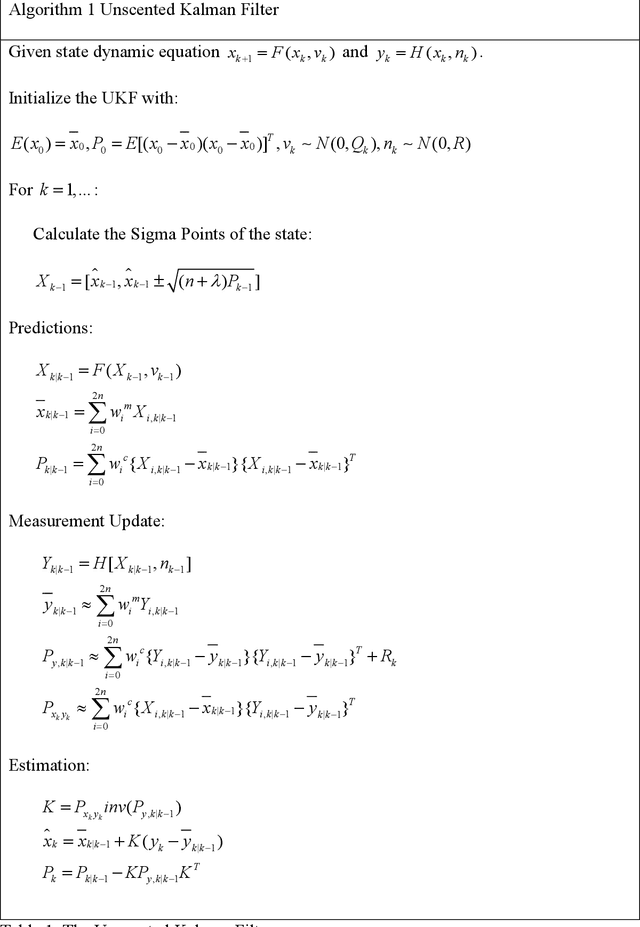
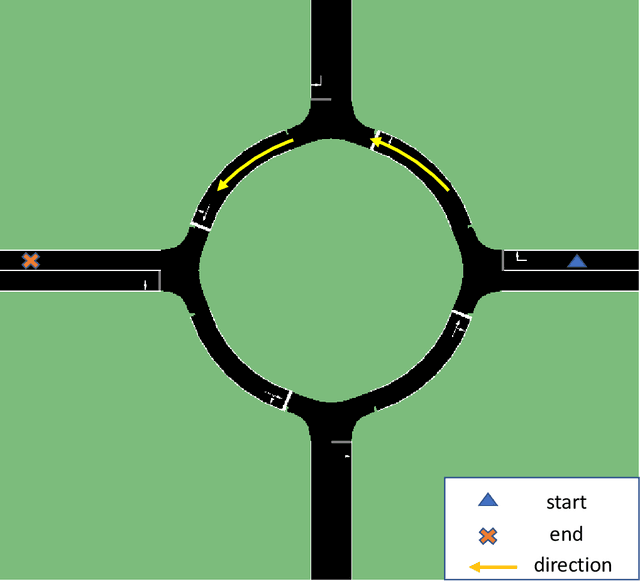
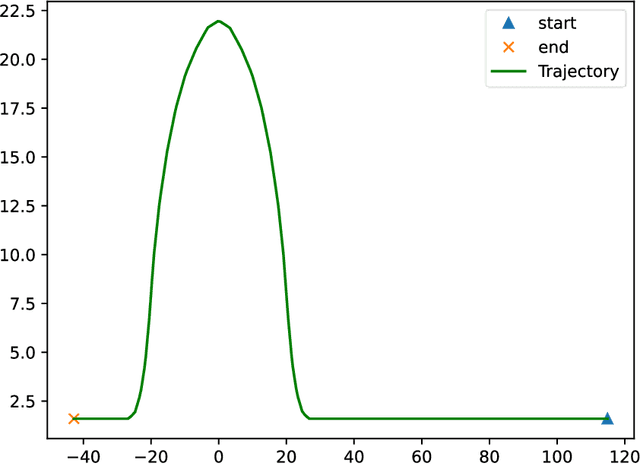
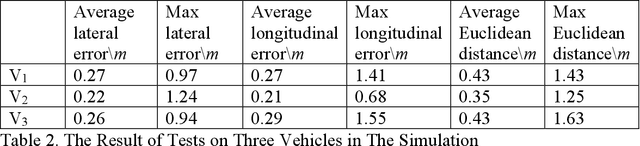
This paper presents methods for vehicle state estimation and prediction for autonomous driving. A roundabout is chosen to apply the methods and illustrate the results as autonomous vehicles have difficulty in handling roundabouts. State estimation based on the unscented Kalman filter (UKF) is introduced first with application to a roundabout. The microscopic traffic simulator SUMO is used to generate realistic traffic in the roundabout for the simulation experiments. Change point detection based driving behavior prediction using a multi policy approach is then introduced and evaluated for the round intersection example. Finally, these methods are combined for vehicle trajectory estimation based on UKF and policy prediction and demonstrated using the roundabout example.
Vehicle in Virtual Environment (VVE) Method
Dec 22, 2022



Autonomous vehicle (AV) algorithms need to be tested extensively in order to make sure the vehicle and the passengers will be safe while using it after the implementation. Testing these algorithms in real world create another important safety critical point. Real world testing is also subjected to limitations such as logistic limitations to carry or drive the vehicle to a certain location. For this purpose, hardware in the loop (HIL) simulations as well as virtual environments such as CARLA and LG SVL are used widely. This paper discusses a method that combines the real vehicle with the virtual world, called vehicle in virtual environment (VVE). This method projects the vehicle location and heading into a virtual world for desired testing, and transfers back the information from sensors in the virtual world to the vehicle. As a result, while vehicle is moving in the real world, it simultaneously moves in the virtual world and obtains the situational awareness via multiple virtual sensors. This would allow testing in a safe environment with the real vehicle while providing some additional benefits on vehicle dynamics fidelity, logistics limitations and passenger experience testing. The paper also demonstrates an example case study where path following and the virtual sensors are utilized to test a radar based stopping algorithm.
Shared Autonomous Vehicle Mobility for a Transportation Underserved City
Oct 25, 2022

This paper proposes the use of an on-demand, ride hailed and ride-Shared Autonomous Vehicle (SAV) service as a feasible solution to serve the mobility needs of a small city where fixed route, circulator type public transportation may be too expensive to operate. The presented work builds upon our earlier work that modeled the city of Marysville, Ohio as an example of such a city, with realistic traffic behavior, and trip requests. A simple SAV dispatcher is implemented to model the behavior of the proposed on-demand mobility service. The goal of the service is to optimally distribute SAVs along the network to allocate passengers and shared rides. The pickup and drop-off locations are strategically placed along the network to provide mobility from affordable housing, which are also transit deserts, to locations corresponding to jobs and other opportunities. The study is carried out by varying the behaviors of the SAV driving system from cautious to aggressive along with the size of the SAV fleet and analyzing their corresponding performance. It is found that the size of the network and behavior of AV driving system behavior results in an optimal number of SAVs after which increasing the number of SAVs does not improve overall mobility. For the Marysville network, which is a 9 mile by 8 mile network, this happens at the mark of a fleet of 8 deployed SAVs. The results show that the introduction of the proposed SAV service with a simple optimal shared scheme can provide access to services and jobs to hundreds of people in a small sized city.