 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHardware-in-the-Loop and Road Testing of RLVW and GLOSA Connected Vehicle Applications
Jun 02, 2023



This paper presents an evaluation of two different Vehicle to Infrastructure (V2I) applications, namely Red Light Violation Warning (RLVW) and Green Light Optimized Speed Advisory (GLOSA). The evaluation method is to first develop and use Hardware-in-the-Loop (HIL) simulator testing, followed by extension of the HIL testing to road testing using an experimental connected vehicle. The HIL simulator used in the testing is a state-of-the-art simulator that consists of the same hardware like the road side unit and traffic cabinet as is used in real intersections and allows testing of numerous different traffic and intersection geometry and timing scenarios realistically. First, the RLVW V2I algorithm is tested in the HIL simulator and then implemented in an On-Board-Unit (OBU) in our experimental vehicle and tested at real world intersections. This same approach of HIL testing followed by testing in real intersections using our experimental vehicle is later extended to the GLOSA application. The GLOSA application that is tested in this paper has both an optimal speed advisory for passing at the green light and also includes a red light violation warning system. The paper presents the HIL and experimental vehicle evaluation systems, information about RLVW and GLOSA and HIL simulation and road testing results and their interpretations.
Customized Co-Simulation Environment for Autonomous Driving Algorithm Development and Evaluation
May 31, 2023



Increasing the implemented SAE level of autonomy in road vehicles requires extensive simulations and verifications in a realistic simulation environment before proving ground and public road testing. The level of detail in the simulation environment helps ensure the safety of a real-world implementation and reduces algorithm development cost by allowing developers to complete most of the validation in the simulation environment. Considering sensors like camera, LIDAR, radar, and V2X used in autonomous vehicles, it is essential to create a simulation environment that can provide these sensor simulations as realistically as possible. While sensor simulations are of crucial importance for perception algorithm development, the simulation environment will be incomplete for the simulation of holistic AV operation without being complemented by a realistic vehicle dynamic model and traffic cosimulation. Therefore, this paper investigates existing simulation environments, identifies use case scenarios, and creates a cosimulation environment to satisfy the simulation requirements for autonomous driving function development using the Carla simulator based on the Unreal game engine for the environment, Sumo or Vissim for traffic co-simulation, Carsim or Matlab, Simulink for vehicle dynamics co-simulation and Autoware or the author or user routines for autonomous driving algorithm co-simulation. As a result of this work, a model-based vehicle dynamics simulation with realistic sensor simulation and traffic simulation is presented. A sensor fusion methodology is implemented in the created simulation environment as a use case scenario. The results of this work will be a valuable resource for researchers who need a comprehensive co-simulation environment to develop connected and autonomous driving algorithms.
V2X Communication Between Connected and Automated Vehicles (CAVs) and Unmanned Aerial Vehicles (UAVs)
Sep 02, 2021



Connectivity between ground vehicles can be utilized and expanded to include aerial vehicles for coordinated missions. Using Vehicle-to-Everything (V2X) communication technologies, a communication link can be established between Connected and Autonomous vehicles (CAVs) and Unmanned Aerial vehicles (UAVs). Hardware implementation and testing of a ground to air communication link is crucial for real-life applications. Two different communication links were established, Dedicated Short Range communication (DSRC) and 4G internet based WebSocket communication. Both links were tested separately both for stationary and dynamic test cases. One step further, both links were used together for a real-life use case scenario called Quick Clear demonstration. The aim was to first send ground vehicle location information from the CAV to the UAV through DSRC communication. On the UAV side, the connection between the DSRC modem and Raspberry Pi companion computer was established through User Datagram Protocol (UDP) to get the CAV location information to the companion computer. Raspberry Pi handles 2 different connection, it first connects to a traffic contingency management system (CMP) through Transmission Control Protocol (TCP) to send CAV and UAV location information to the CMP. Secondly, Raspberry Pi uses a WebSocket communication to connect to a web server to send photos taken by an on-board camera the UAV has. Quick Clear demo was conducted both for stationary test and dynamic flight tests. The results show that this communication structure can be utilized for real-life scenarios.
Pedestrian Path Modification Mobile Tool for COVID-19 Social Distancing for Use in Multi-Modal Trip Navigation
May 08, 2021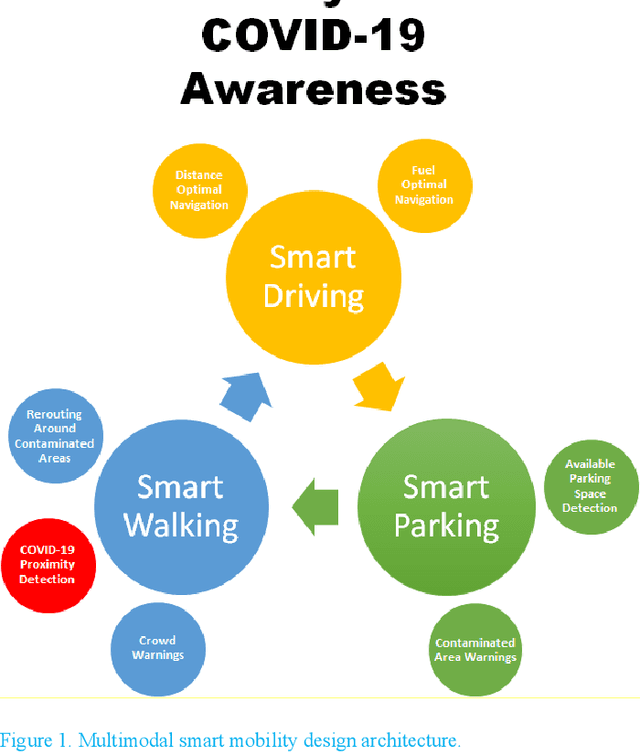
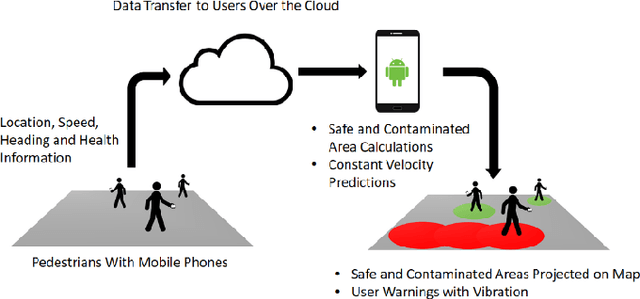
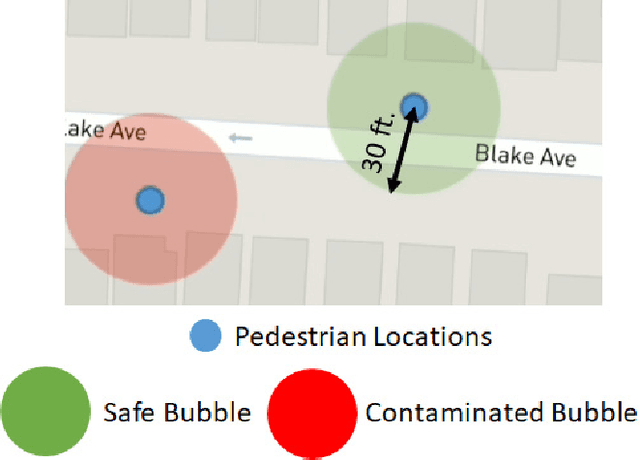
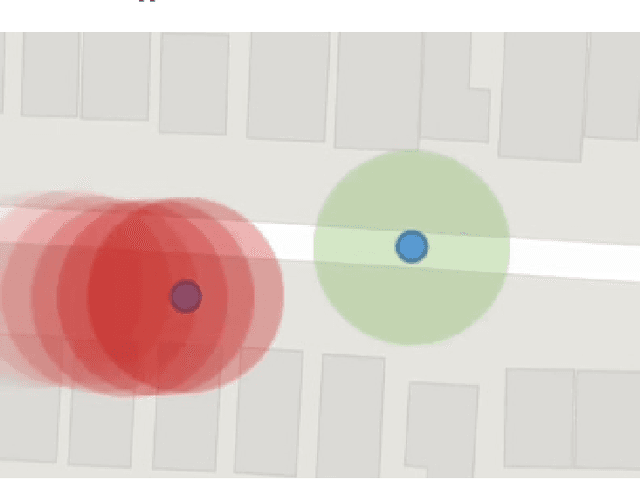
The novel Corona virus pandemic is one of the biggest worldwide problems right now. While hygiene and wearing masks make up a large portion of the currently suggested precautions by the Centers for Disease Control and Prevention (CDC) and World Health Organization (WHO), social distancing is another and arguably the most important precaution that would protect people since the airborne virus is easily transmitted through the air. Social distancing while walking outside, can be more effective, if pedestrians know locations of each other and even better if they know locations of people who are possible carriers. With this information, they can change their routes depending on the people walking nearby or they can stay away from areas that contain or have recently contained crowds. This paper presents a mobile device application that would be a very beneficial tool for social distancing during Coronavirus Disease 2019 (COVID-19). The application works, synced close to real-time, in a networking fashion with all users obtaining their locations and drawing a virtual safety bubble around them. These safety bubbles are used with the constant velocity pedestrian model to predict possible future social distancing violations and warn the user with sound and vibration. Moreover, it takes into account the virus staying airborne for a certain time, hence, creating time-decaying non-safe areas in the past trajectories of the users. The mobile app generates collision free paths for navigating around the undesired locations for the pedestrian mode of transportation when used as part of a multi-modal trip planning app. Results are applicable to other modes of transportation also. Features and the methods used for implementation are discussed in the paper. The application is tested using previously collected real pedestrian walking data in a realistic environment.
Data Association Between Perception and V2V Communication Sensors
Jan 20, 2021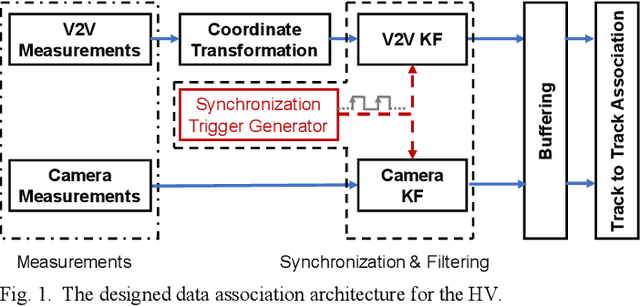
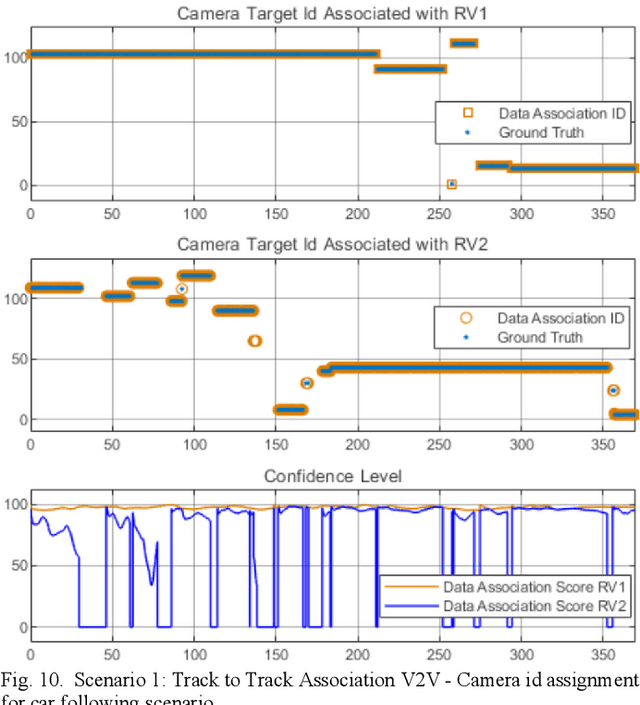

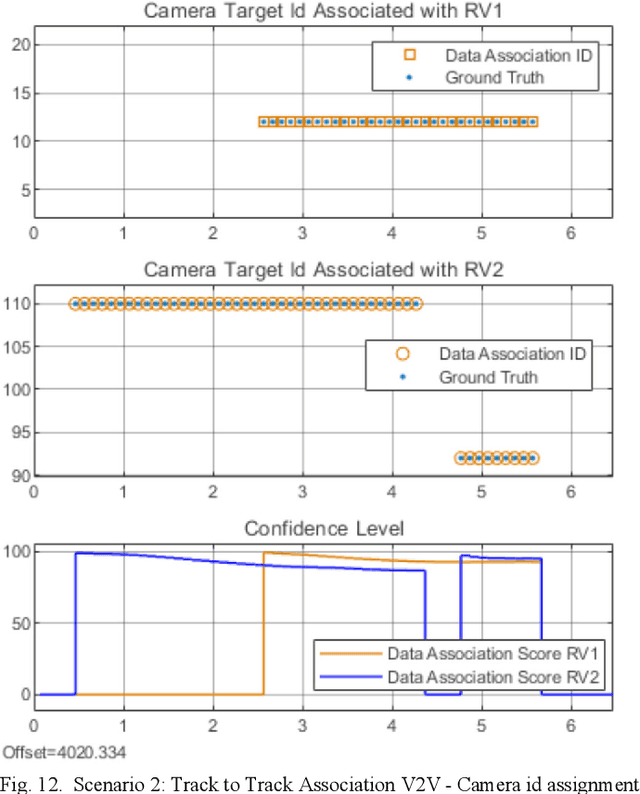
The connectivity between vehicles, infrastructure, and other traffic participants brings a new dimension to automotive safety applications. Soon all the newly produced cars will have Vehicle to Everything (V2X) communication modems alongside the existing Advanced Driver Assistant Systems (ADAS). It is essential to identify the different sensor measurements for the same targets (Data Association) to use connectivity reliably as a safety feature alongside the standard ADAS functionality. Considering the camera is the most common sensor available for ADAS systems, in this paper, we present an experimental implementation of a Mahalanobis distance-based data association algorithm between the camera and the Vehicle to Vehicle (V2V) communication sensors. The implemented algorithm has low computational complexity and the capability of running in real-time. One can use the presented algorithm for sensor fusion algorithms or higher-level decision-making applications in ADAS modules.