 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHardware-in-the-Loop and Road Testing of RLVW and GLOSA Connected Vehicle Applications
Jun 02, 2023



This paper presents an evaluation of two different Vehicle to Infrastructure (V2I) applications, namely Red Light Violation Warning (RLVW) and Green Light Optimized Speed Advisory (GLOSA). The evaluation method is to first develop and use Hardware-in-the-Loop (HIL) simulator testing, followed by extension of the HIL testing to road testing using an experimental connected vehicle. The HIL simulator used in the testing is a state-of-the-art simulator that consists of the same hardware like the road side unit and traffic cabinet as is used in real intersections and allows testing of numerous different traffic and intersection geometry and timing scenarios realistically. First, the RLVW V2I algorithm is tested in the HIL simulator and then implemented in an On-Board-Unit (OBU) in our experimental vehicle and tested at real world intersections. This same approach of HIL testing followed by testing in real intersections using our experimental vehicle is later extended to the GLOSA application. The GLOSA application that is tested in this paper has both an optimal speed advisory for passing at the green light and also includes a red light violation warning system. The paper presents the HIL and experimental vehicle evaluation systems, information about RLVW and GLOSA and HIL simulation and road testing results and their interpretations.
Modelling and Analysis of Car Following Algorithms for Fuel Economy Improvement in Connected and Autonomous Vehicles (CAVs)
Mar 25, 2022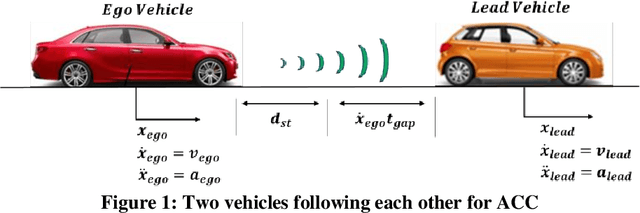
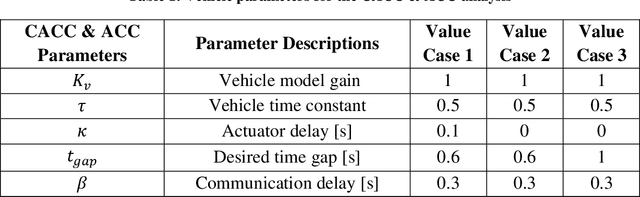

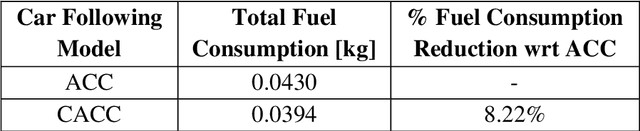
Connectivity in ground vehicles allows vehicles to share crucial vehicle data, such as vehicle acceleration, with each other. Using sensors such as cameras, radars and lidars, on the other hand, the intravehicular distance between a leader vehicle and a host vehicle can be detected, as well as the relative speed. Cooperative Adaptive Cruise Control (CACC) builds upon ground vehicle connectivity and sensor information to form convoys with automated car following. CACC can also be used to improve fuel economy and mobility performance of vehicles in the said convoy. In this paper, 3 car following algorithms for fuel economy of CAVs are presented. An Adaptive Cruise Control (ACC) algorithm was designed as the benchmark model for comparison. A Cooperative Adaptive Cruise Control (CACC) was designed, which uses lead vehicle acceleration received through V2V in car following. an Ecological Cooperative Adaptive Cruise Control (Eco-CACC) model was developed that takes the erratic lead vehicle acceleration as a disturbance to be attenuated. A High Level (HL) controller was designed for decision making when the lead vehicle was an erratic driver. Model-in-the-Loop (MIL) and Hardware-in-the-Loop (HIL) simulations were run to test these car following algorithms for fuel economy performance. The results show that the HL controller was able to attain a smooth speed profile that consumed less fuel through using CACC and Eco-CACC than its ACC counterpart when the lead vehicle was erratic.
V2X Communication Between Connected and Automated Vehicles (CAVs) and Unmanned Aerial Vehicles (UAVs)
Sep 02, 2021



Connectivity between ground vehicles can be utilized and expanded to include aerial vehicles for coordinated missions. Using Vehicle-to-Everything (V2X) communication technologies, a communication link can be established between Connected and Autonomous vehicles (CAVs) and Unmanned Aerial vehicles (UAVs). Hardware implementation and testing of a ground to air communication link is crucial for real-life applications. Two different communication links were established, Dedicated Short Range communication (DSRC) and 4G internet based WebSocket communication. Both links were tested separately both for stationary and dynamic test cases. One step further, both links were used together for a real-life use case scenario called Quick Clear demonstration. The aim was to first send ground vehicle location information from the CAV to the UAV through DSRC communication. On the UAV side, the connection between the DSRC modem and Raspberry Pi companion computer was established through User Datagram Protocol (UDP) to get the CAV location information to the companion computer. Raspberry Pi handles 2 different connection, it first connects to a traffic contingency management system (CMP) through Transmission Control Protocol (TCP) to send CAV and UAV location information to the CMP. Secondly, Raspberry Pi uses a WebSocket communication to connect to a web server to send photos taken by an on-board camera the UAV has. Quick Clear demo was conducted both for stationary test and dynamic flight tests. The results show that this communication structure can be utilized for real-life scenarios.