 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModelling and Analysis of Car Following Algorithms for Fuel Economy Improvement in Connected and Autonomous Vehicles (CAVs)
Paper and Code
Mar 25, 2022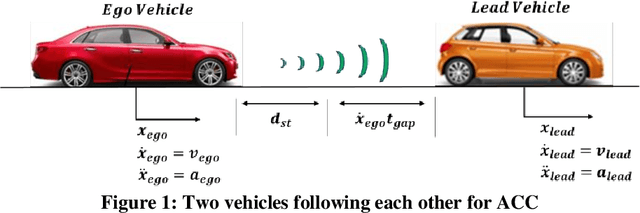

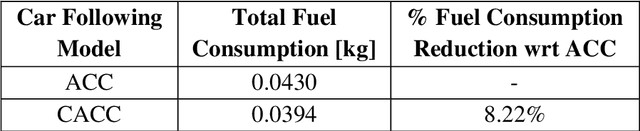
Connectivity in ground vehicles allows vehicles to share crucial vehicle data, such as vehicle acceleration, with each other. Using sensors such as cameras, radars and lidars, on the other hand, the intravehicular distance between a leader vehicle and a host vehicle can be detected, as well as the relative speed. Cooperative Adaptive Cruise Control (CACC) builds upon ground vehicle connectivity and sensor information to form convoys with automated car following. CACC can also be used to improve fuel economy and mobility performance of vehicles in the said convoy. In this paper, 3 car following algorithms for fuel economy of CAVs are presented. An Adaptive Cruise Control (ACC) algorithm was designed as the benchmark model for comparison. A Cooperative Adaptive Cruise Control (CACC) was designed, which uses lead vehicle acceleration received through V2V in car following. an Ecological Cooperative Adaptive Cruise Control (Eco-CACC) model was developed that takes the erratic lead vehicle acceleration as a disturbance to be attenuated. A High Level (HL) controller was designed for decision making when the lead vehicle was an erratic driver. Model-in-the-Loop (MIL) and Hardware-in-the-Loop (HIL) simulations were run to test these car following algorithms for fuel economy performance. The results show that the HL controller was able to attain a smooth speed profile that consumed less fuel through using CACC and Eco-CACC than its ACC counterpart when the lead vehicle was erratic.