 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHardware-in-the-Loop and Road Testing of RLVW and GLOSA Connected Vehicle Applications
Jun 02, 2023



This paper presents an evaluation of two different Vehicle to Infrastructure (V2I) applications, namely Red Light Violation Warning (RLVW) and Green Light Optimized Speed Advisory (GLOSA). The evaluation method is to first develop and use Hardware-in-the-Loop (HIL) simulator testing, followed by extension of the HIL testing to road testing using an experimental connected vehicle. The HIL simulator used in the testing is a state-of-the-art simulator that consists of the same hardware like the road side unit and traffic cabinet as is used in real intersections and allows testing of numerous different traffic and intersection geometry and timing scenarios realistically. First, the RLVW V2I algorithm is tested in the HIL simulator and then implemented in an On-Board-Unit (OBU) in our experimental vehicle and tested at real world intersections. This same approach of HIL testing followed by testing in real intersections using our experimental vehicle is later extended to the GLOSA application. The GLOSA application that is tested in this paper has both an optimal speed advisory for passing at the green light and also includes a red light violation warning system. The paper presents the HIL and experimental vehicle evaluation systems, information about RLVW and GLOSA and HIL simulation and road testing results and their interpretations.
Cooperative Collision Avoidance in a Connected Vehicle Environment
Jun 02, 2023



Connected vehicle (CV) technology is among the most heavily researched areas in both the academia and industry. The vehicle to vehicle (V2V), vehicle to infrastructure (V2I) and vehicle to pedestrian (V2P) communication capabilities enable critical situational awareness. In some cases, these vehicle communication safety capabilities can overcome the shortcomings of other sensor safety capabilities because of external conditions such as 'No Line of Sight' (NLOS) or very harsh weather conditions. Connected vehicles will help cities and states reduce traffic congestion, improve fuel efficiency and improve the safety of the vehicles and pedestrians. On the road, cars will be able to communicate with one another, automatically transmitting data such as speed, position, and direction, and send alerts to each other if a crash seems imminent. The main focus of this paper is the implementation of Cooperative Collision Avoidance (CCA) for connected vehicles. It leverages the Vehicle to Everything (V2X) communication technology to create a real-time implementable collision avoidance algorithm along with decision-making for a vehicle that communicates with other vehicles. Four distinct collision risk environments are simulated on a cost effective Connected Autonomous Vehicle (CAV) Hardware in the Loop (HIL) simulator to test the overall algorithm in real-time with real electronic control and communication hardware.
Vehicle-in-Virtual-Environment (VVE)
May 25, 2023The current approach to connected and autonomous driving function development and evaluation uses model-in-the-loop simulation, hardware-in-the-loop simulation, and limited proving ground work followed by public road deployment of beta version of software and technology. The rest of the road users are involuntarily forced into taking part in the development and evaluation of these connected and autonomous driving functions in this approach. This is an unsafe, costly and inefficient method. Motivated by these shortcomings, this paper introduces the Vehicle-in-Virtual-Environment (VVE) method of safe, efficient and low cost connected and autonomous driving function development, evaluation and demonstration. The VVE method is compared to the existing state-of-the-art. Its basic implementation for a path following task is used to explain the method where the actual autonomous vehicle operates in a large empty area with its sensor feeds being replaced by realistic sensor feeds corresponding to its location and pose in the virtual environment. It is possible to easily change the development virtual environment and inject rare and difficult events which can be tested very safely. Vehicle-to-Pedestrian (V2P) communication based pedestrian safety is chosen as the application use case for VVE and corresponding experimental results are presented and discussed. It is noted that actual pedestrians and other vulnerable road users can be used very safely in this approach.
Vehicle in Virtual Environment (VVE) Method
Dec 22, 2022



Autonomous vehicle (AV) algorithms need to be tested extensively in order to make sure the vehicle and the passengers will be safe while using it after the implementation. Testing these algorithms in real world create another important safety critical point. Real world testing is also subjected to limitations such as logistic limitations to carry or drive the vehicle to a certain location. For this purpose, hardware in the loop (HIL) simulations as well as virtual environments such as CARLA and LG SVL are used widely. This paper discusses a method that combines the real vehicle with the virtual world, called vehicle in virtual environment (VVE). This method projects the vehicle location and heading into a virtual world for desired testing, and transfers back the information from sensors in the virtual world to the vehicle. As a result, while vehicle is moving in the real world, it simultaneously moves in the virtual world and obtains the situational awareness via multiple virtual sensors. This would allow testing in a safe environment with the real vehicle while providing some additional benefits on vehicle dynamics fidelity, logistics limitations and passenger experience testing. The paper also demonstrates an example case study where path following and the virtual sensors are utilized to test a radar based stopping algorithm.
V2X Communication Between Connected and Automated Vehicles (CAVs) and Unmanned Aerial Vehicles (UAVs)
Sep 02, 2021



Connectivity between ground vehicles can be utilized and expanded to include aerial vehicles for coordinated missions. Using Vehicle-to-Everything (V2X) communication technologies, a communication link can be established between Connected and Autonomous vehicles (CAVs) and Unmanned Aerial vehicles (UAVs). Hardware implementation and testing of a ground to air communication link is crucial for real-life applications. Two different communication links were established, Dedicated Short Range communication (DSRC) and 4G internet based WebSocket communication. Both links were tested separately both for stationary and dynamic test cases. One step further, both links were used together for a real-life use case scenario called Quick Clear demonstration. The aim was to first send ground vehicle location information from the CAV to the UAV through DSRC communication. On the UAV side, the connection between the DSRC modem and Raspberry Pi companion computer was established through User Datagram Protocol (UDP) to get the CAV location information to the companion computer. Raspberry Pi handles 2 different connection, it first connects to a traffic contingency management system (CMP) through Transmission Control Protocol (TCP) to send CAV and UAV location information to the CMP. Secondly, Raspberry Pi uses a WebSocket communication to connect to a web server to send photos taken by an on-board camera the UAV has. Quick Clear demo was conducted both for stationary test and dynamic flight tests. The results show that this communication structure can be utilized for real-life scenarios.
Pedestrian Path Modification Mobile Tool for COVID-19 Social Distancing for Use in Multi-Modal Trip Navigation
May 08, 2021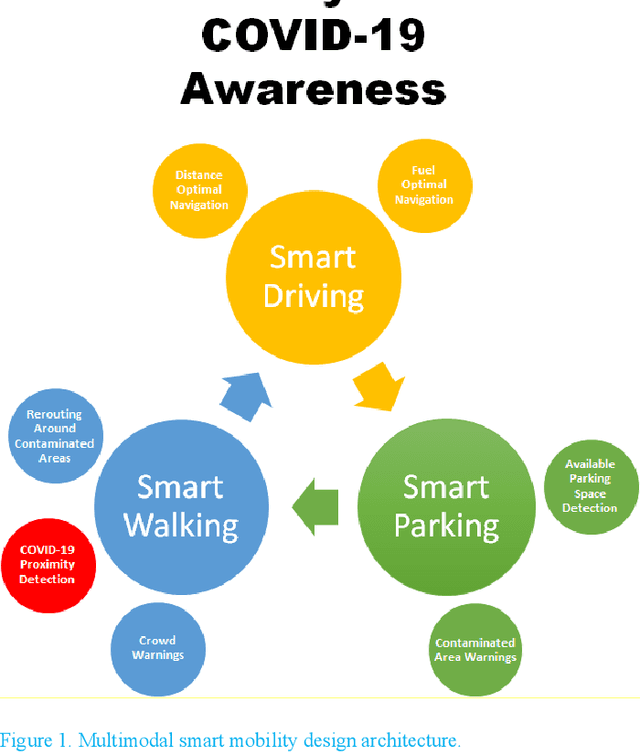
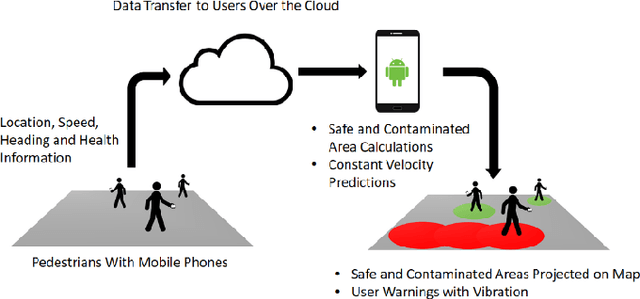
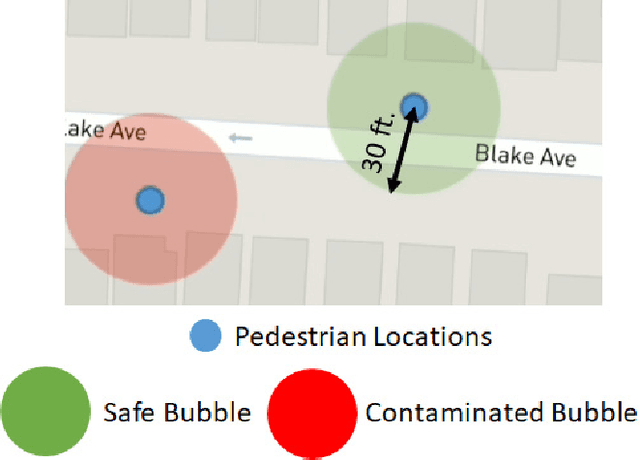
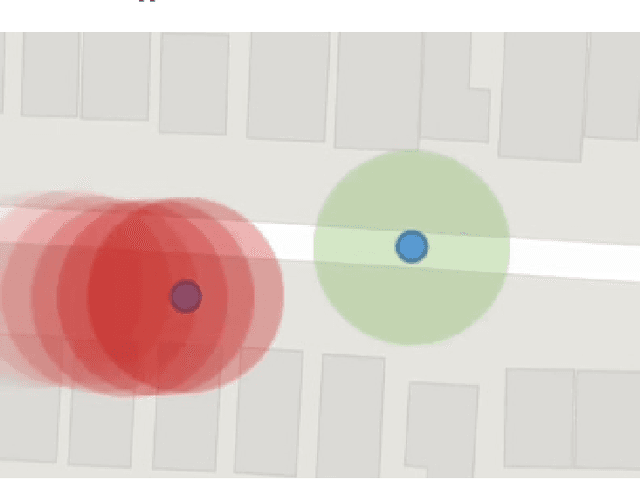
The novel Corona virus pandemic is one of the biggest worldwide problems right now. While hygiene and wearing masks make up a large portion of the currently suggested precautions by the Centers for Disease Control and Prevention (CDC) and World Health Organization (WHO), social distancing is another and arguably the most important precaution that would protect people since the airborne virus is easily transmitted through the air. Social distancing while walking outside, can be more effective, if pedestrians know locations of each other and even better if they know locations of people who are possible carriers. With this information, they can change their routes depending on the people walking nearby or they can stay away from areas that contain or have recently contained crowds. This paper presents a mobile device application that would be a very beneficial tool for social distancing during Coronavirus Disease 2019 (COVID-19). The application works, synced close to real-time, in a networking fashion with all users obtaining their locations and drawing a virtual safety bubble around them. These safety bubbles are used with the constant velocity pedestrian model to predict possible future social distancing violations and warn the user with sound and vibration. Moreover, it takes into account the virus staying airborne for a certain time, hence, creating time-decaying non-safe areas in the past trajectories of the users. The mobile app generates collision free paths for navigating around the undesired locations for the pedestrian mode of transportation when used as part of a multi-modal trip planning app. Results are applicable to other modes of transportation also. Features and the methods used for implementation are discussed in the paper. The application is tested using previously collected real pedestrian walking data in a realistic environment.
SmartShuttle: Model Based Design and Evaluation of Automated On-Demand Shuttles for Solving the First-Mile and Last-Mile Problem in a Smart City
Dec 23, 2020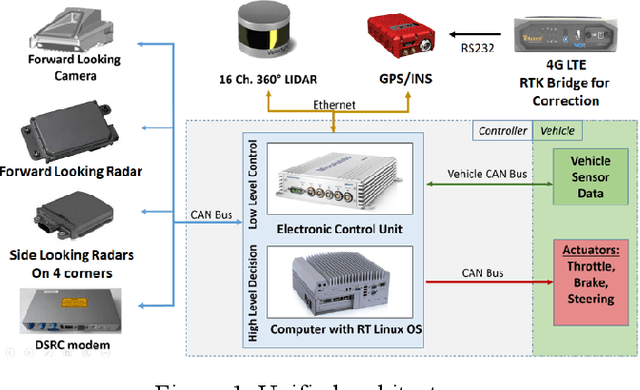
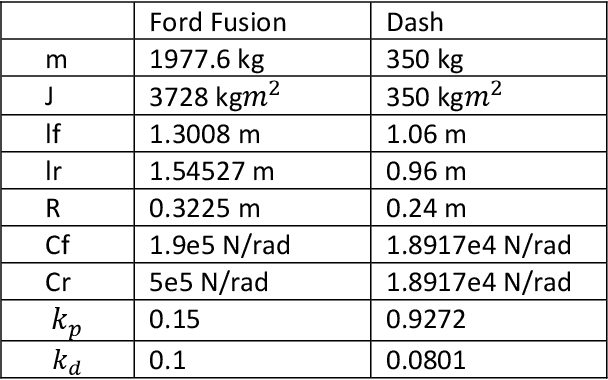
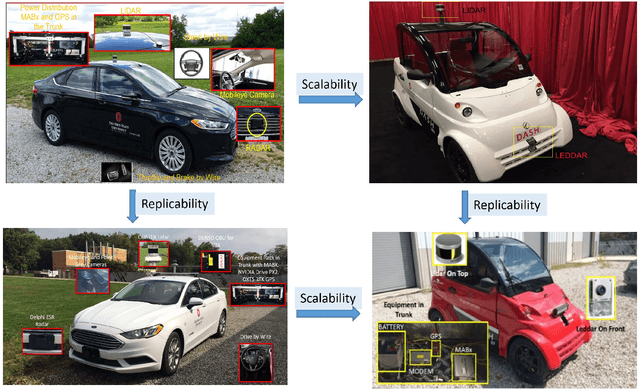
The final project report for the SmartShuttle sub-project of the Ohio State University is presented in this report. This has been a two year project where the unified, scalable and replicable automated driving architecture introduced by the Automated Driving Lab of the Ohio State University has been further developed, replicated in different vehicles and scaled between different vehicle sizes. A limited scale demonstration was also conducted during the first year of the project. The architecture used was further developed in the second project year including parameter space based low level controller design, perception methods and data collection. Perception sensor and other relevant vehicle data were collected in the second project year. Our approach changed to using soft AVs in a hardware-in-the-loop simulation environment for proof-of-concept testing. Our second year work also had a change of localization from GPS and lidar based SLAM to GPS and map matching using a previously constructed lidar map in a geo-fenced area. An example lidar map was also created. Perception sensor and other collected data and an example lidar map are shared as datasets as further outcomes of the project.
Simulation Environment for Safety Assessment of CEAV Deployment in Linden
Dec 18, 2020


This report presents a simulation environment for pre-deployment testing of the autonomous shuttles that will operate in the Linden Residential Area. An autonomous shuttle deployment was already successfully launched and operated in the city of Columbus and ended recently. This report focuses on the second autonomous shuttle deployment planned to start in December, 2019, using a route that will help to solve first-mile / last-mile mobility challenges in the Linden neighborhood of Columbus by providing free rides between St. Stephens Community House, Douglas Community Recreation Center, Rosewind Resident Council and Linden Transit Center. This document presents simulation testing environments in two open source simulators and a commercial simulator for this residential area route and how they can be used for model-in-the-loop and hardware-in-the-loop simulation testing of autonomous shuttle operation before the actual deployment.