 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRHA-Net: An Encoder-Decoder Network with Residual Blocks and Hybrid Attention Mechanisms for Pavement Crack Segmentation
Jul 28, 2022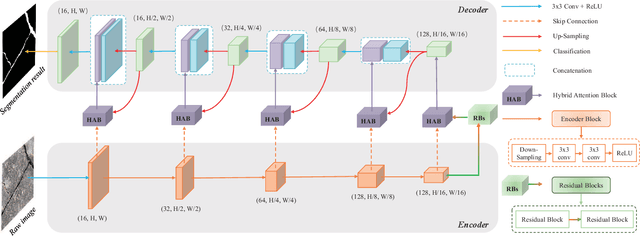
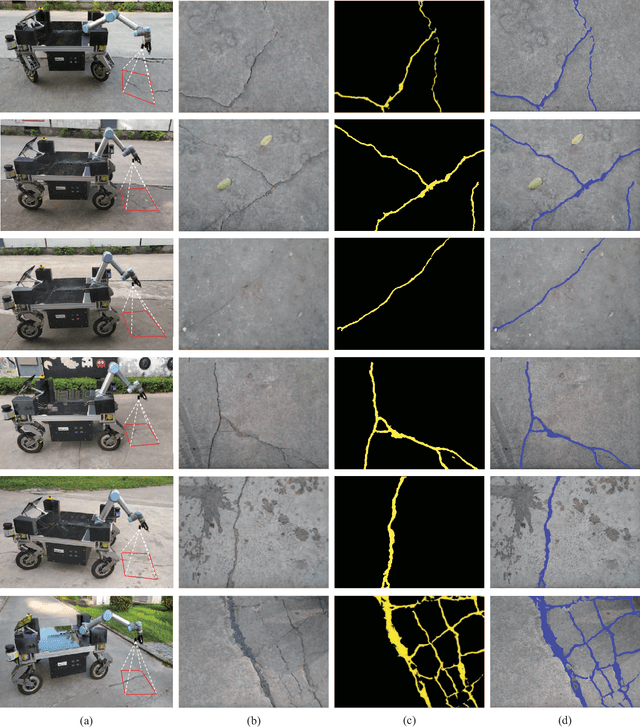
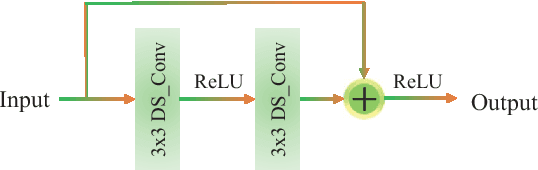
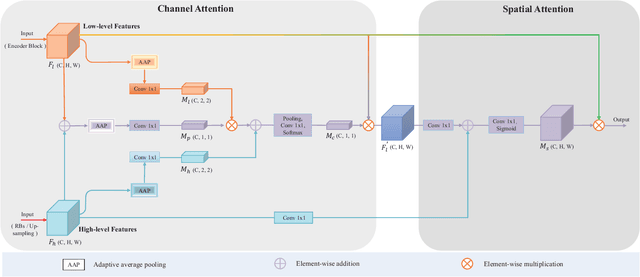
The acquisition and evaluation of pavement surface data play an essential role in pavement condition evaluation. In this paper, an efficient and effective end-to-end network for automatic pavement crack segmentation, called RHA-Net, is proposed to improve the pavement crack segmentation accuracy. The RHA-Net is built by integrating residual blocks (ResBlocks) and hybrid attention blocks into the encoder-decoder architecture. The ResBlocks are used to improve the ability of RHA-Net to extract high-level abstract features. The hybrid attention blocks are designed to fuse both low-level features and high-level features to help the model focus on correct channels and areas of cracks, thereby improving the feature presentation ability of RHA-Net. An image data set containing 789 pavement crack images collected by a self-designed mobile robot is constructed and used for training and evaluating the proposed model. Compared with other state-of-the-art networks, the proposed model achieves better performance and the functionalities of adding residual blocks and hybrid attention mechanisms are validated in a comprehensive ablation study. Additionally, a light-weighted version of the model generated by introducing depthwise separable convolution achieves better a performance and a much faster processing speed with 1/30 of the number of U-Net parameters. The developed system can segment pavement crack in real-time on an embedded device Jetson TX2 (25 FPS). The video taken in real-time experiments is released at https://youtu.be/3XIogk0fiG4.
Vision-based Distributed Multi-UAV Collision Avoidance via Deep Reinforcement Learning for Navigation
Mar 05, 2022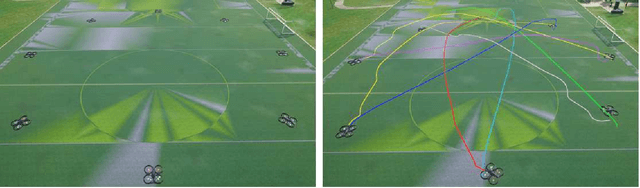
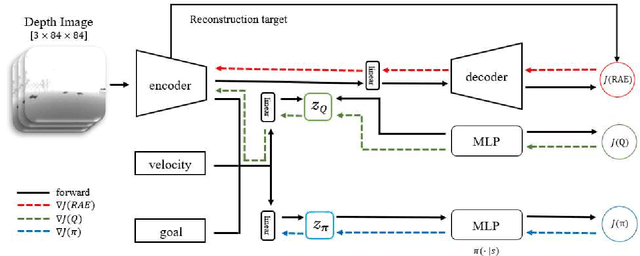
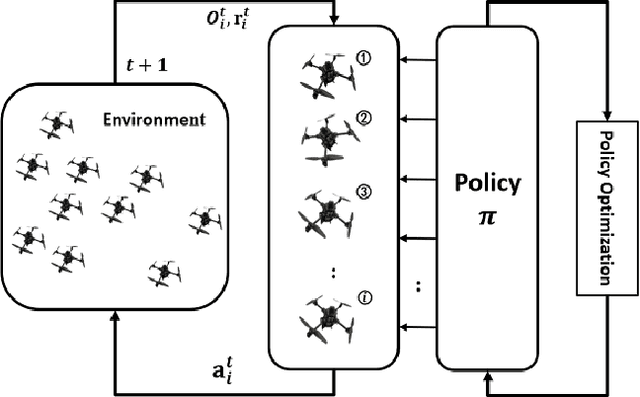
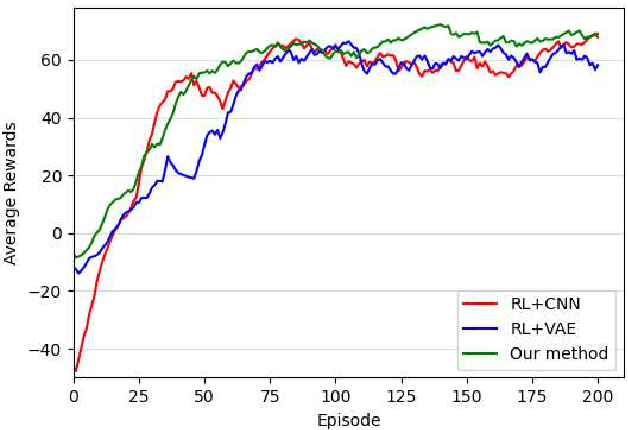
Online path planning for multiple unmanned aerial vehicle (multi-UAV) systems is considered a challenging task. It needs to ensure collision-free path planning in real-time, especially when the multi-UAV systems can become very crowded on certain occasions. In this paper, we presented a vision-based decentralized collision-avoidance policy for multi-UAV systems, which takes depth images and inertial measurements as sensory inputs and outputs UAV's steering commands. The policy is trained together with the latent representation of depth images using a policy gradient-based reinforcement learning algorithm and autoencoder in the multi-UAV threedimensional workspaces. Each UAV follows the same trained policy and acts independently to reach the goal without colliding or communicating with other UAVs. We validate our policy in various simulated scenarios. The experimental results show that our learned policy can guarantee fully autonomous collision-free navigation for multi-UAV in the three-dimensional workspaces with good robustness and scalability.
Ensemble of Deep Convolutional Neural Networks for Automatic Pavement Crack Detection and Measurement
Feb 08, 2020
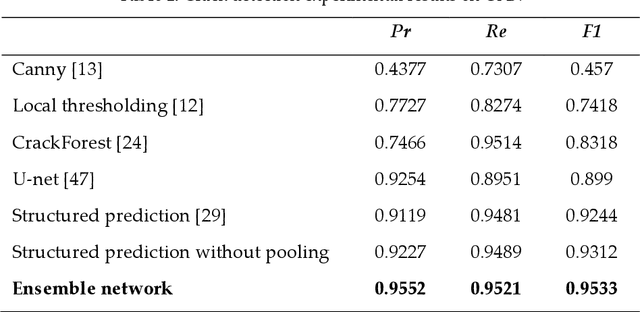
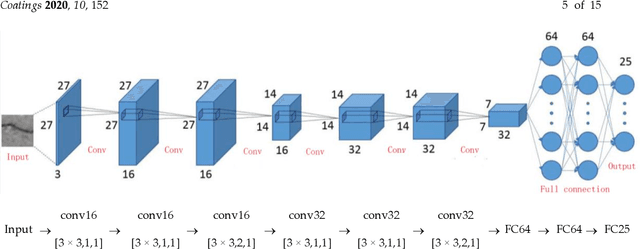
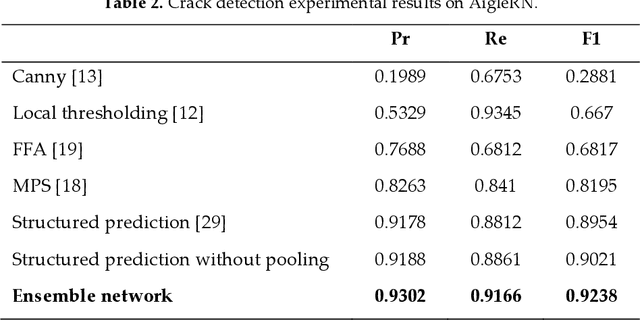
Automated pavement crack detection and measurement are important road issues. Agencies have to guarantee the improvement of road safety. Conventional crack detection and measurement algorithms can be extremely time-consuming and low efficiency. Therefore, recently, innovative algorithms have received increased attention from researchers. In this paper, we propose an ensemble of convolutional neural networks (without a pooling layer) based on probability fusion for automated pavement crack detection and measurement. Specifically, an ensemble of convolutional neural networks was employed to identify the structure of small cracks with raw images. Secondly, outputs of the individual convolutional neural network model for the ensemble were averaged to produce the final crack probability value of each pixel, which can obtain a predicted probability map. Finally, the predicted morphological features of the cracks were measured by using the skeleton extraction algorithm. To validate the proposed method, some experiments were performed on two public crack databases (CFD and AigleRN) and the results of the different state-of-the-art methods were compared. The experimental results show that the proposed method outperforms the other methods. For crack measurement, the crack length and width can be measure based on different crack types (complex, common, thin, and intersecting cracks.). The results show that the proposed algorithm can be effectively applied for crack measurement.
ENAS U-Net: Evolutionary Neural Architecture Search for Retinal Vessel Segmentation
Jan 18, 2020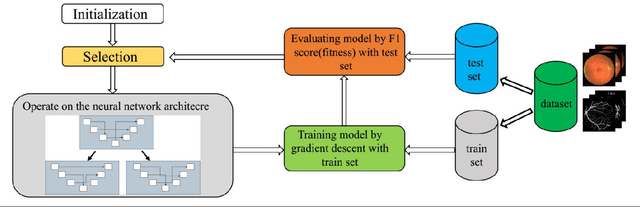
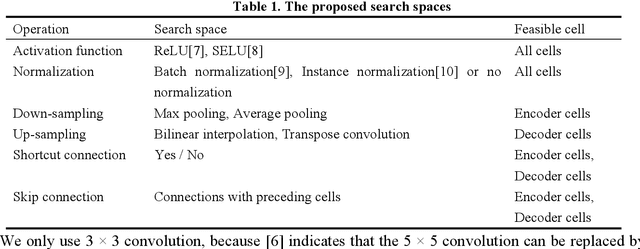
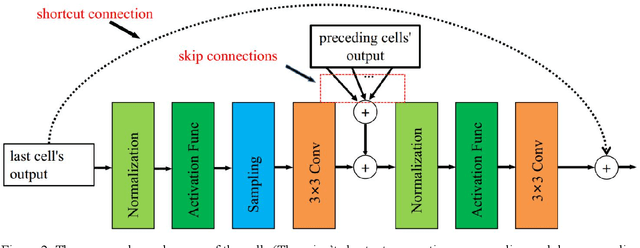
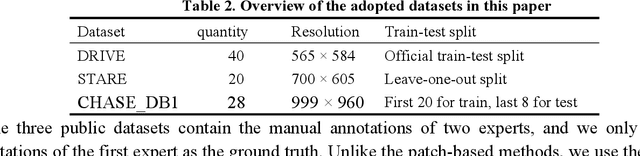
The accurate retina vessel segmentation (RVS) is of great significance to assist doctors in the diagnosis of ophthalmology diseases and other systemic diseases, and manually designing a valid neural network architecture for retinal vessel segmentation requires high expertise and a large workload. In order to further improve the performance of vessel segmentation and reduce the workload of manually designing neural network. We propose a specific search space based on encoder-decoder framework and apply neural architecture search (NAS) to retinal vessel segmentation. The search space is a macro-architecture search that involves some operations and adjustments to the entire network topology. For the architecture optimization, we adopt the modified evolutionary strategy which can evolve with limited computing resource to evolve the architectures. During the evolution, we select the elite architectures for the next generation evolution based on their performances. After the evolution, the searched model is evaluated on three mainstream datasets, namely DRIVE, STARE and CHASE_DB1. The searched model achieves top performance on all three datasets with fewer parameters (about 2.3M). Moreover, the results of cross-training between above three datasets show that the searched model is with considerable scalability, which indicates that the searched model is with potential for clinical disease diagnosis.
Accurate Retinal Vessel Segmentation via Octave Convolution Neural Network
Aug 11, 2019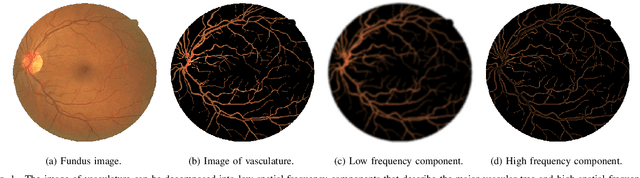
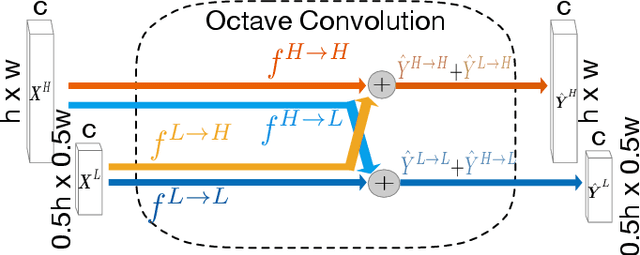
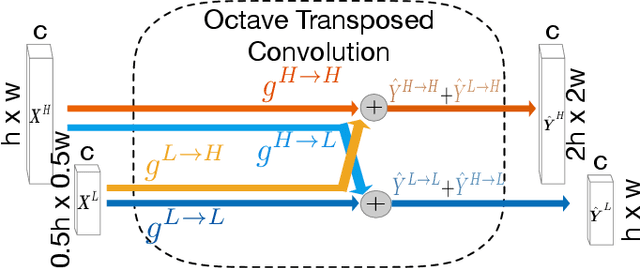
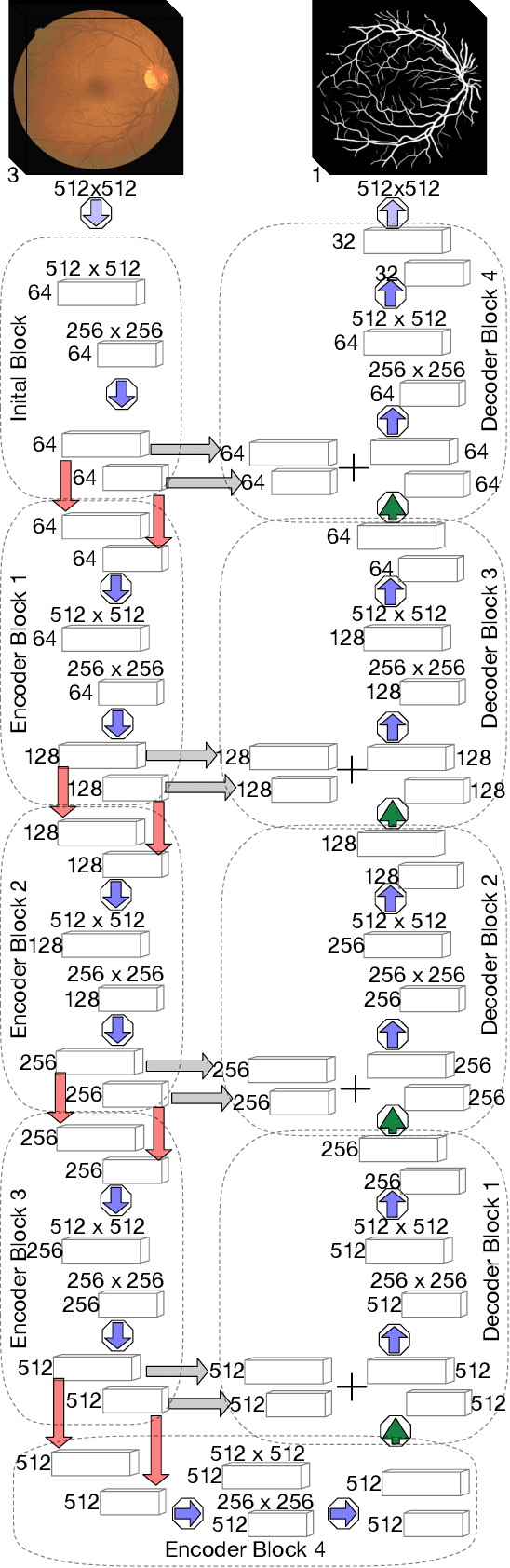
Retinal vessel segmentation is a crucial step in diagnosing and screening various diseases, including diabetes, ophthalmologic diseases, and cardiovascular diseases. In this paper, we propose an effective and efficient method for vessel segmentation in color fundus images using encoder-decoder based octave convolution network. Compared with other convolution networks utilizing vanilla convolution for feature extraction, the proposed method adopts octave convolution for learning multiple-spatial-frequency features, thus can better capture retinal vasculatures with varying sizes and shapes. It is demonstrated that the feature maps of low-frequency kernels respond mainly to the major vascular tree, whereas the high-frequency feature maps can better capture the fine details of thin vessels. To provide the network the capability of learning how to decode multifrequency features, we extend octave convolution and propose a new operation named octave transposed convolution. A novel architecture of convolutional neural network is proposed based on the encoder-decoder architecture of UNet, which can generate high resolution vessel segmentation in one single forward feeding. The proposed method is evaluated on four publicly available datasets, including DRIVE, STARE, CHASE_DB1, and HRF. Extensive experimental results demonstrate that the proposed approach achieves better or comparable performance to the state-of-the-art methods with fast processing speed.
Modeling and Multi-objective Optimization of a Kind of Teaching Manipulator
Jan 31, 2018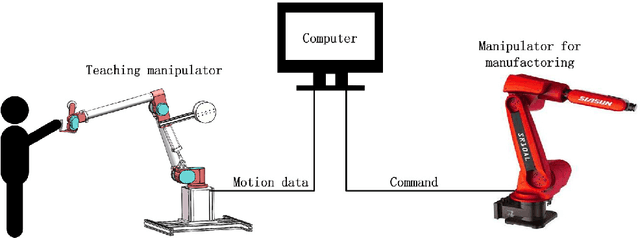
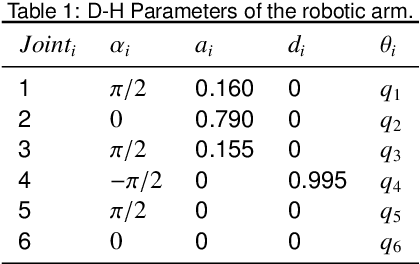
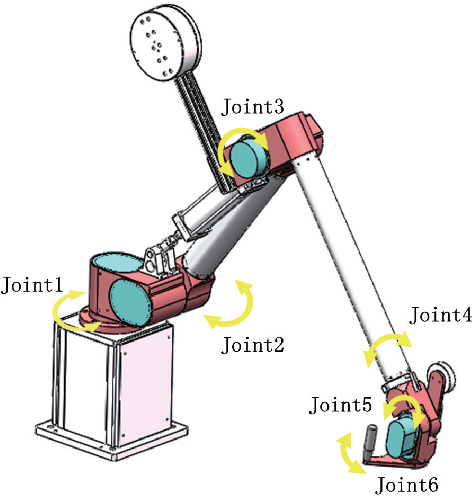
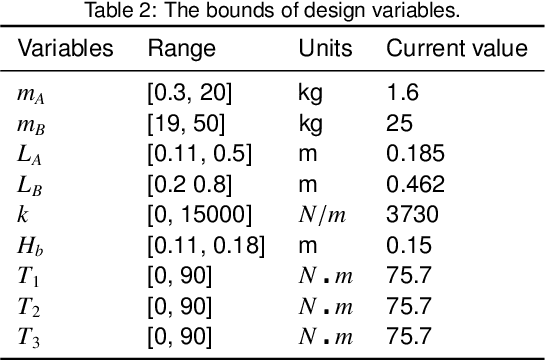
A new kind of six degree-of-freedom teaching manipulator without actuators is designed, for recording and conveniently setting a trajectory of an industrial robot. The device requires good gravity balance and operating force performance to ensure being controlled easily and fluently. In this paper, we propose a process for modeling the manipulator and then the model is used to formulate a multi-objective optimization problem to optimize the design of the testing manipulator. Three objectives, including total mass of the device, gravity balancing and operating force performance are analyzed and defined. A popular non-dominated sorting genetic algorithm (NSGA-II-CDP) is used to solve the optimization problem. The obtained solutions all outperform the design of a human expert. To extract design knowledge, an innovization study is performed to establish meaningful implicit relationship between the objective space and the decision space, which can be reused by the designer in future design process.