 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmboCoach-Bench: Benchmarking AI Agents on Developing Embodied Robots
Jan 29, 2026The field of Embodied AI is witnessing a rapid evolution toward general-purpose robotic systems, fueled by high-fidelity simulation and large-scale data collection. However, this scaling capability remains severely bottlenecked by a reliance on labor-intensive manual oversight from intricate reward shaping to hyperparameter tuning across heterogeneous backends. Inspired by LLMs' success in software automation and science discovery, we introduce \textsc{EmboCoach-Bench}, a benchmark evaluating the capacity of LLM agents to autonomously engineer embodied policies. Spanning 32 expert-curated RL and IL tasks, our framework posits executable code as the universal interface. We move beyond static generation to assess a dynamic closed-loop workflow, where agents leverage environment feedback to iteratively draft, debug, and optimize solutions, spanning improvements from physics-informed reward design to policy architectures such as diffusion policies. Extensive evaluations yield three critical insights: (1) autonomous agents can qualitatively surpass human-engineered baselines by 26.5\% in average success rate; (2) agentic workflow with environment feedback effectively strengthens policy development and substantially narrows the performance gap between open-source and proprietary models; and (3) agents exhibit self-correction capabilities for pathological engineering cases, successfully resurrecting task performance from near-total failures through iterative simulation-in-the-loop debugging. Ultimately, this work establishes a foundation for self-evolving embodied intelligence, accelerating the paradigm shift from labor-intensive manual tuning to scalable, autonomous engineering in embodied AI field.
Rate-Distortion Optimized Communication for Collaborative Perception
Sep 26, 2025



Collaborative perception emphasizes enhancing environmental understanding by enabling multiple agents to share visual information with limited bandwidth resources. While prior work has explored the empirical trade-off between task performance and communication volume, a significant gap remains in the theoretical foundation. To fill this gap, we draw on information theory and introduce a pragmatic rate-distortion theory for multi-agent collaboration, specifically formulated to analyze performance-communication trade-off in goal-oriented multi-agent systems. This theory concretizes two key conditions for designing optimal communication strategies: supplying pragmatically relevant information and transmitting redundancy-less messages. Guided by these two conditions, we propose RDcomm, a communication-efficient collaborative perception framework that introduces two key innovations: i) task entropy discrete coding, which assigns features with task-relevant codeword-lengths to maximize the efficiency in supplying pragmatic information; ii) mutual-information-driven message selection, which utilizes mutual information neural estimation to approach the optimal redundancy-less condition. Experiments on 3D object detection and BEV segmentation demonstrate that RDcomm achieves state-of-the-art accuracy on DAIR-V2X and OPV2V, while reducing communication volume by up to 108 times. The code will be released.
RoCo-Sim: Enhancing Roadside Collaborative Perception through Foreground Simulation
Mar 13, 2025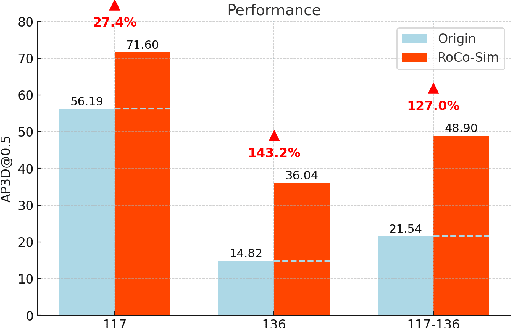
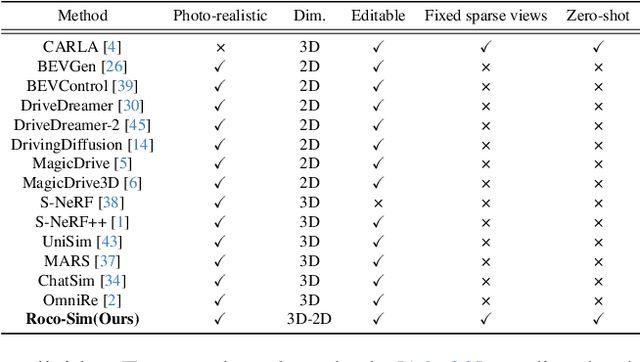
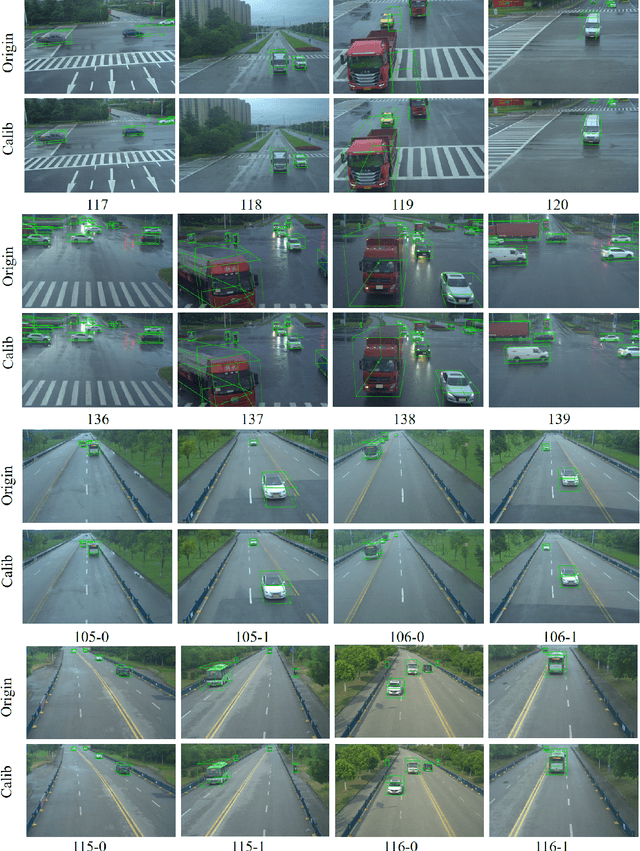
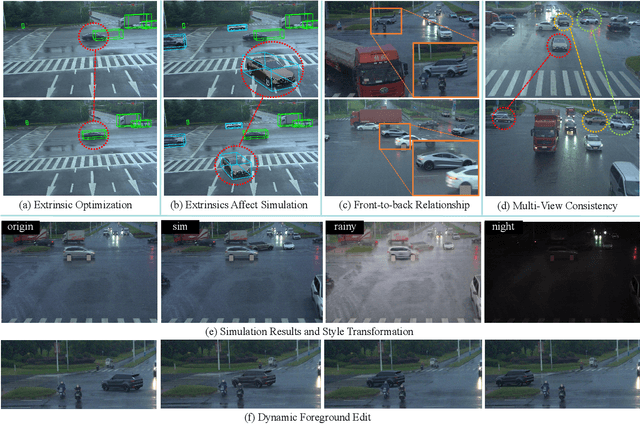
Roadside Collaborative Perception refers to a system where multiple roadside units collaborate to pool their perceptual data, assisting vehicles in enhancing their environmental awareness. Existing roadside perception methods concentrate on model design but overlook data issues like calibration errors, sparse information, and multi-view consistency, leading to poor performance on recent published datasets. To significantly enhance roadside collaborative perception and address critical data issues, we present the first simulation framework RoCo-Sim for road-side collaborative perception. RoCo-Sim is capable of generating diverse, multi-view consistent simulated roadside data through dynamic foreground editing and full-scene style transfer of a single image. RoCo-Sim consists of four components: (1) Camera Extrinsic Optimization ensures accurate 3D to 2D projection for roadside cameras; (2) A novel Multi-View Occlusion-Aware Sampler (MOAS) determines the placement of diverse digital assets within 3D space; (3) DepthSAM innovatively models foreground-background relationships from single-frame fixed-view images, ensuring multi-view consistency of foreground; and (4) Scalable Post-Processing Toolkit generates more realistic and enriched scenes through style transfer and other enhancements. RoCo-Sim significantly improves roadside 3D object detection, outperforming SOTA methods by 83.74 on Rcooper-Intersection and 83.12 on TUMTraf-V2X for AP70. RoCo-Sim fills a critical gap in roadside perception simulation. Code and pre-trained models will be released soon: https://github.com/duyuwen-duen/RoCo-Sim
CoLMDriver: LLM-based Negotiation Benefits Cooperative Autonomous Driving
Mar 11, 2025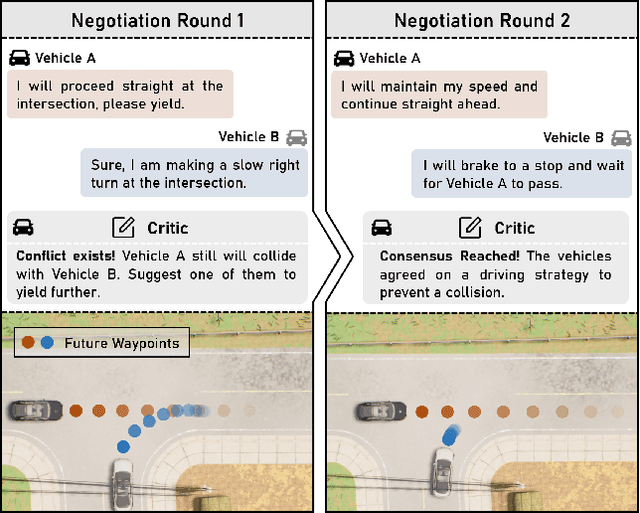
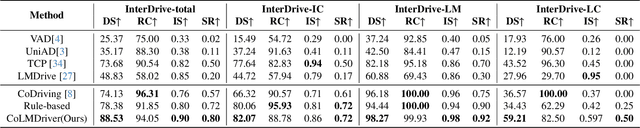
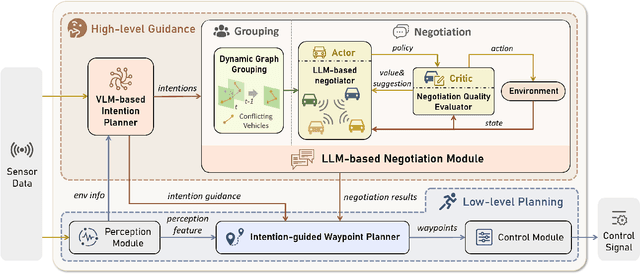
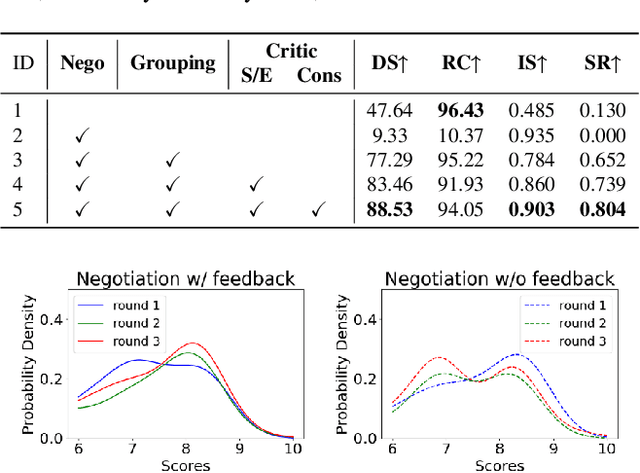
Vehicle-to-vehicle (V2V) cooperative autonomous driving holds great promise for improving safety by addressing the perception and prediction uncertainties inherent in single-agent systems. However, traditional cooperative methods are constrained by rigid collaboration protocols and limited generalization to unseen interactive scenarios. While LLM-based approaches offer generalized reasoning capabilities, their challenges in spatial planning and unstable inference latency hinder their direct application in cooperative driving. To address these limitations, we propose CoLMDriver, the first full-pipeline LLM-based cooperative driving system, enabling effective language-based negotiation and real-time driving control. CoLMDriver features a parallel driving pipeline with two key components: (i) an LLM-based negotiation module under an actor-critic paradigm, which continuously refines cooperation policies through feedback from previous decisions of all vehicles; and (ii) an intention-guided waypoint generator, which translates negotiation outcomes into executable waypoints. Additionally, we introduce InterDrive, a CARLA-based simulation benchmark comprising 10 challenging interactive driving scenarios for evaluating V2V cooperation. Experimental results demonstrate that CoLMDriver significantly outperforms existing approaches, achieving an 11% higher success rate across diverse highly interactive V2V driving scenarios. Code will be released on https://github.com/cxliu0314/CoLMDriver.
Towards Collaborative Autonomous Driving: Simulation Platform and End-to-End System
Apr 15, 2024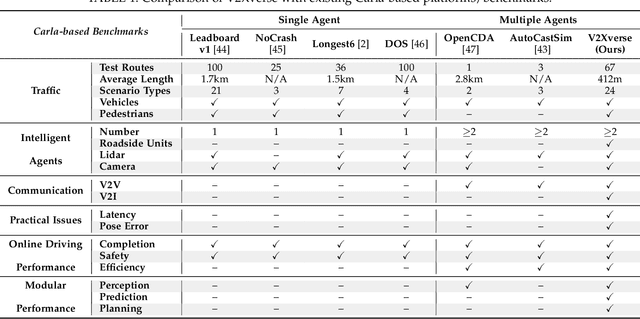
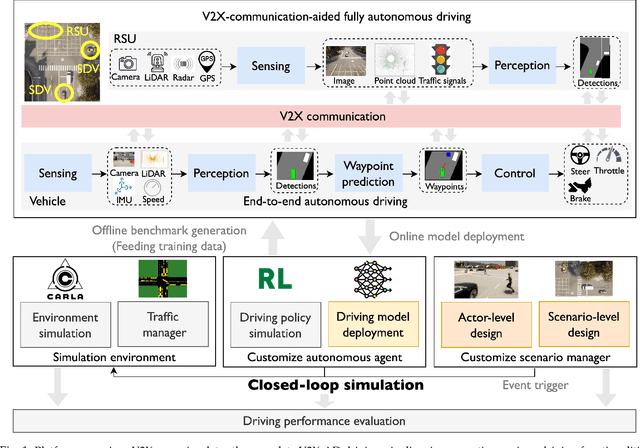
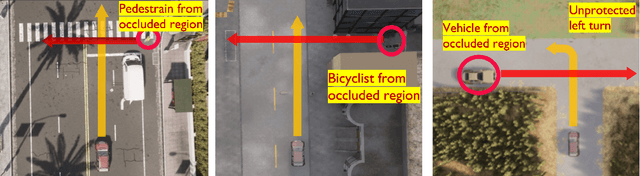
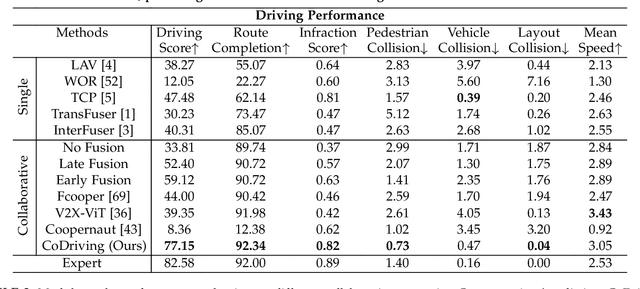
Vehicle-to-everything-aided autonomous driving (V2X-AD) has a huge potential to provide a safer driving solution. Despite extensive researches in transportation and communication to support V2X-AD, the actual utilization of these infrastructures and communication resources in enhancing driving performances remains largely unexplored. This highlights the necessity of collaborative autonomous driving: a machine learning approach that optimizes the information sharing strategy to improve the driving performance of each vehicle. This effort necessitates two key foundations: a platform capable of generating data to facilitate the training and testing of V2X-AD, and a comprehensive system that integrates full driving-related functionalities with mechanisms for information sharing. From the platform perspective, we present V2Xverse, a comprehensive simulation platform for collaborative autonomous driving. This platform provides a complete pipeline for collaborative driving. From the system perspective, we introduce CoDriving, a novel end-to-end collaborative driving system that properly integrates V2X communication over the entire autonomous pipeline, promoting driving with shared perceptual information. The core idea is a novel driving-oriented communication strategy. Leveraging this strategy, CoDriving improves driving performance while optimizing communication efficiency. We make comprehensive benchmarks with V2Xverse, analyzing both modular performance and closed-loop driving performance. Experimental results show that CoDriving: i) significantly improves the driving score by 62.49% and drastically reduces the pedestrian collision rate by 53.50% compared to the SOTA end-to-end driving method, and ii) achieves sustaining driving performance superiority over dynamic constraint communication conditions.
Online Multi-Agent Forecasting with Interpretable Collaborative Graph Neural Network
Jul 02, 2021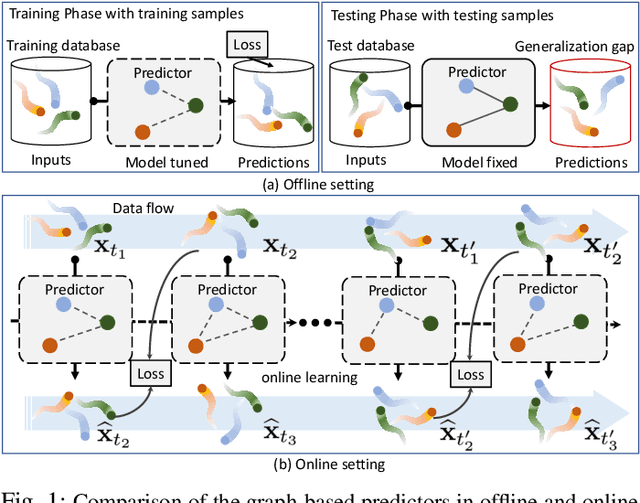
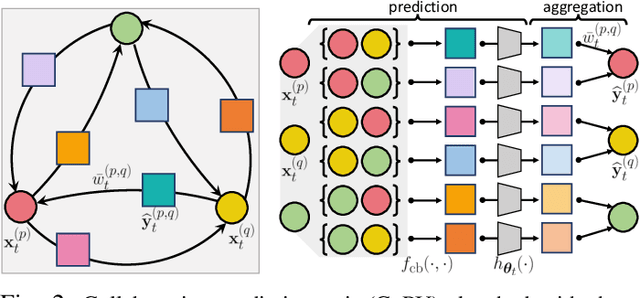

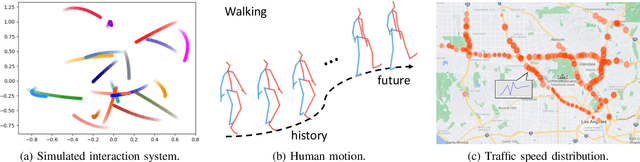
This paper considers predicting future statuses of multiple agents in an online fashion by exploiting dynamic interactions in the system. We propose a novel collaborative prediction unit (CoPU), which aggregates the predictions from multiple collaborative predictors according to a collaborative graph. Each collaborative predictor is trained to predict the status of an agent by considering the impact of another agent. The edge weights of the collaborative graph reflect the importance of each predictor. The collaborative graph is adjusted online by multiplicative update, which can be motivated by minimizing an explicit objective. With this objective, we also conduct regret analysis to indicate that, along with training, our CoPU achieves similar performance with the best individual collaborative predictor in hindsight. This theoretical interpretability distinguishes our method from many other graph networks. To progressively refine predictions, multiple CoPUs are stacked to form a collaborative graph neural network. Extensive experiments are conducted on three tasks: online simulated trajectory prediction, online human motion prediction and online traffic speed prediction, and our methods outperform state-of-the-art works on the three tasks by 28.6%, 17.4% and 21.0% on average, respectively.