 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting Drug-Drug Interactions from Heterogeneous Data: An Embedding Approach
Mar 19, 2021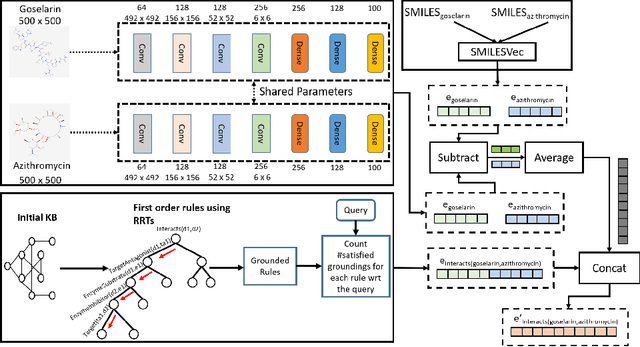
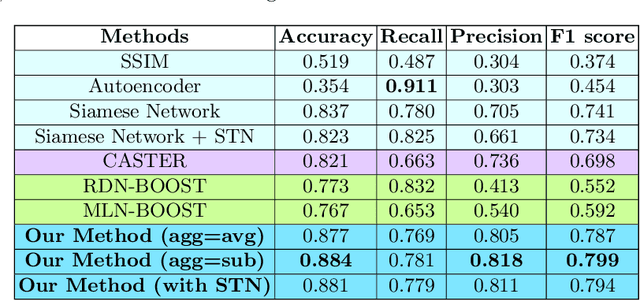
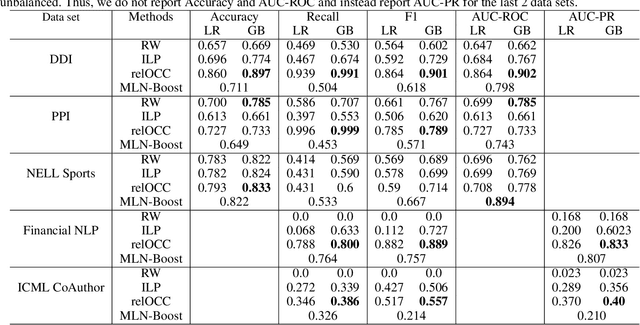
Predicting and discovering drug-drug interactions (DDIs) using machine learning has been studied extensively. However, most of the approaches have focused on text data or textual representation of the drug structures. We present the first work that uses multiple data sources such as drug structure images, drug structure string representation and relational representation of drug relationships as the input. To this effect, we exploit the recent advances in deep networks to integrate these varied sources of inputs in predicting DDIs. Our empirical evaluation against several state-of-the-art methods using standalone different data types for drugs clearly demonstrate the efficacy of combining heterogeneous data in predicting DDIs.
Multi-Robot Routing with Time Windows: A Column Generation Approach
Mar 16, 2021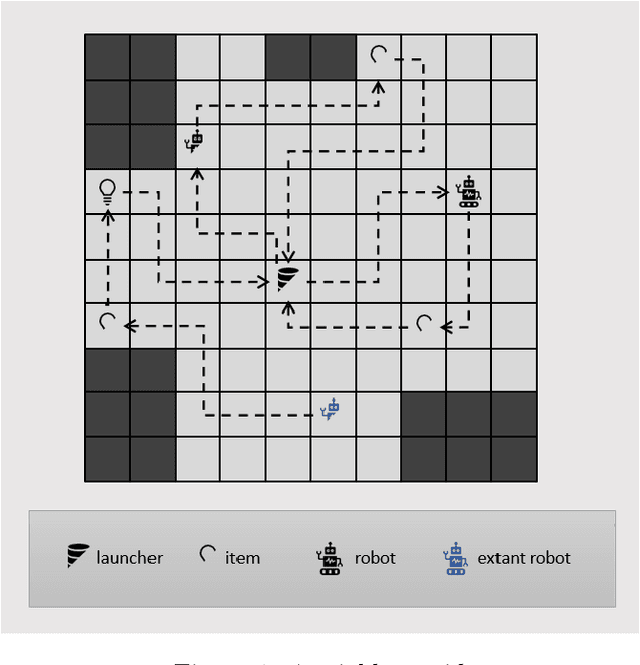

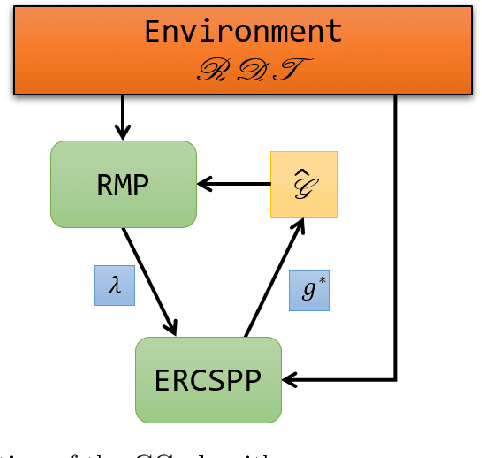

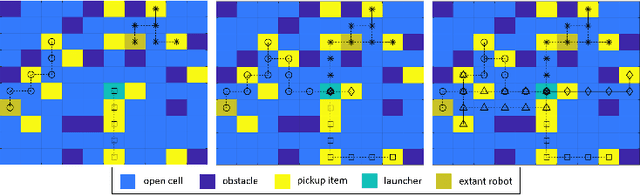
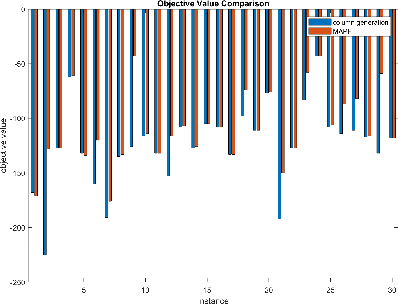
Robots performing tasks in warehouses provide the first example of wide-spread adoption of autonomous vehicles in transportation and logistics. The efficiency of these operations, which can vary widely in practice, are a key factor in the success of supply chains. In this work we consider the problem of coordinating a fleet of robots performing picking operations in a warehouse so as to maximize the net profit achieved within a time period while respecting problem- and robot-specific constraints. We formulate the problem as a weighted set packing problem where the elements in consideration are items on the warehouse floor that can be picked up and delivered within specified time windows. We enforce the constraint that robots must not collide, that each item is picked up and delivered by at most one robot, and that the number of robots active at any time does not exceed the total number available. Since the set of routes is exponential in the size of the input, we attack optimization of the resulting integer linear program using column generation, where pricing amounts to solving an elementary resource-constrained shortest-path problem. We propose an efficient optimization scheme that avoids consideration of every increment within the time windows. We also propose a heuristic pricing algorithm that can efficiently solve the pricing subproblem. While this itself is an important problem, the insights gained from solving these problems effectively can lead to new advances in other time-widow constrained vehicle routing problems.
Integer Programming for Multi-Robot Planning: A Column Generation Approach
Jun 08, 2020

We consider the problem of coordinating a fleet of robots in a warehouse so as to maximize the reward achieved within a time limit while respecting problem and robot specific constraints. We formulate the problem as a weighted set packing problem where elements are defined as being the space-time positions a robot can occupy and the items that can be picked up and delivered. We enforce that robots do not collide, that each item is delivered at most once, and that the number of robots active at any time does not exceed the total number available. Since the set of robot routes is not enumerable, we attack optimization using column generation where pricing is a resource-constrained shortest-path problem.
Knowledge Graph Alignment using String Edit Distance
Mar 30, 2020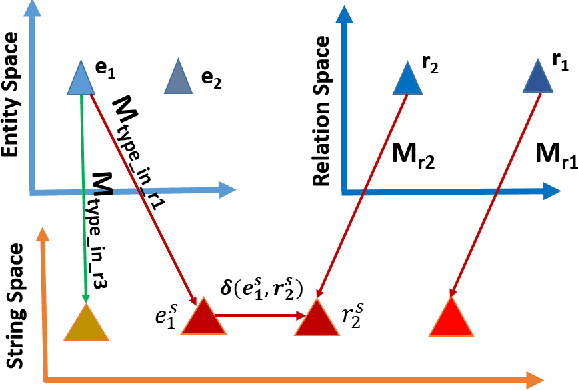
In this work, we propose a novel knowledge graph alignment technique based upon string edit distance that exploits the type information between entities and can find similarity between relations of any arity
Non-Parametric Learning of Gaifman Models
Jan 15, 2020

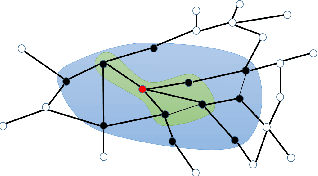
We consider the problem of structure learning for Gaifman models and learn relational features that can be used to derive feature representations from a knowledge base. These relational features are first-order rules that are then partially grounded and counted over local neighborhoods of a Gaifman model to obtain the feature representations. We propose a method for learning these relational features for a Gaifman model by using relational tree distances. Our empirical evaluation on real data sets demonstrates the superiority of our approach over classical rule-learning.
Non-Parametric Learning of Lifted Restricted Boltzmann Machines
Jan 09, 2020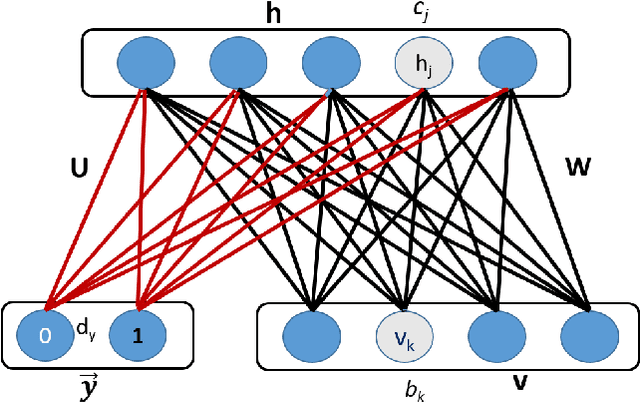
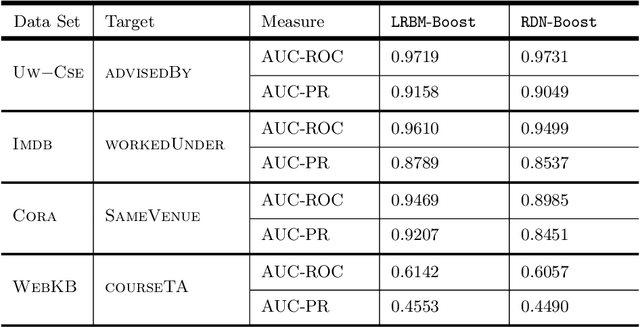

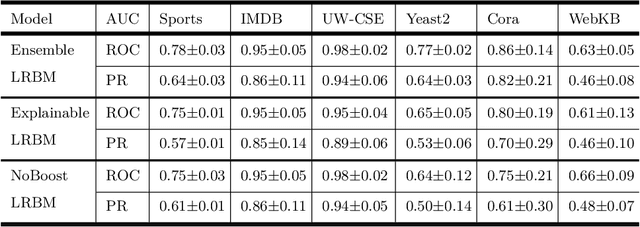
We consider the problem of discriminatively learning restricted Boltzmann machines in the presence of relational data. Unlike previous approaches that employ a rule learner (for structure learning) and a weight learner (for parameter learning) sequentially, we develop a gradient-boosted approach that performs both simultaneously. Our approach learns a set of weak relational regression trees, whose paths from root to leaf are conjunctive clauses and represent the structure, and whose leaf values represent the parameters. When the learned relational regression trees are transformed into a lifted RBM, its hidden nodes are precisely the conjunctive clauses derived from the relational regression trees. This leads to a more interpretable and explainable model. Our empirical evaluations clearly demonstrate this aspect, while displaying no loss in effectiveness of the learned models.
Predicting Drug-Drug Interactions from Molecular Structure Images
Nov 14, 2019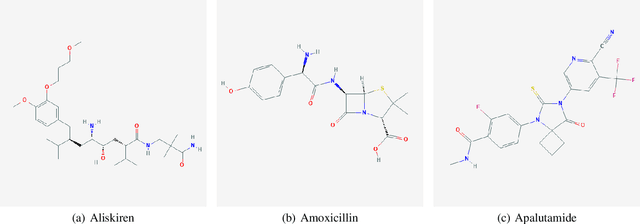
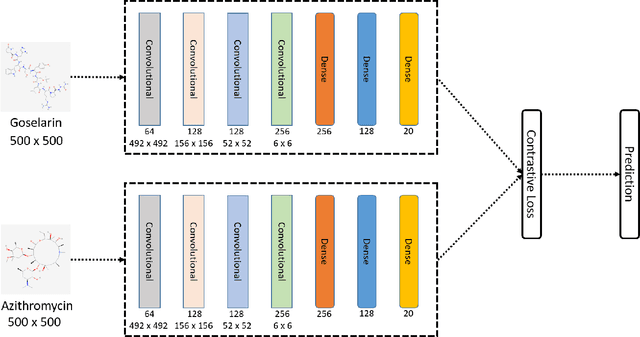
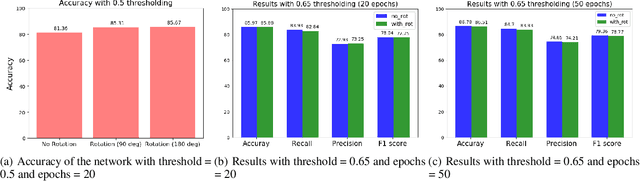

Predicting and discovering drug-drug interactions (DDIs) is an important problem and has been studied extensively both from medical and machine learning point of view. Almost all of the machine learning approaches have focused on text data or textual representation of the structural data of drugs. We present the first work that uses drug structure images as the input and utilizes a Siamese convolutional network architecture to predict DDIs.
Neural Networks for Relational Data
Aug 28, 2019
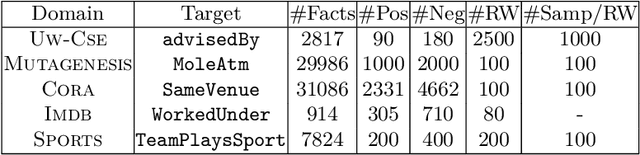
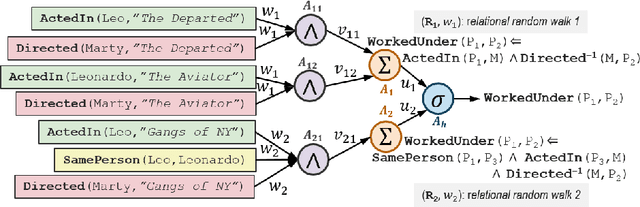
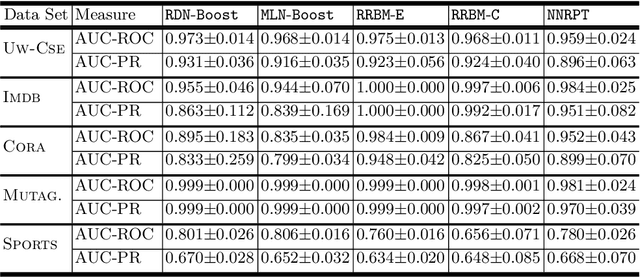
While deep networks have been enormously successful over the last decade, they rely on flat-feature vector representations, which makes them unsuitable for richly structured domains such as those arising in applications like social network analysis. Such domains rely on relational representations to capture complex relationships between entities and their attributes. Thus, we consider the problem of learning neural networks for relational data. We distinguish ourselves from current approaches that rely on expert hand-coded rules by learning relational random-walk-based features to capture local structural interactions and the resulting network architecture. We further exploit parameter tying of the network weights of the resulting relational neural network, where instances of the same type share parameters. Our experimental results across several standard relational data sets demonstrate the effectiveness of the proposed approach over multiple neural net baselines as well as state-of-the-art statistical relational models.
Knowledge-augmented Column Networks: Guiding Deep Learning with Advice
May 31, 2019
Recently, deep models have had considerable success in several tasks, especially with low-level representations. However, effective learning from sparse noisy samples is a major challenge in most deep models, especially in domains with structured representations. Inspired by the proven success of human guided machine learning, we propose Knowledge-augmented Column Networks, a relational deep learning framework that leverages human advice/knowledge to learn better models in presence of sparsity and systematic noise.
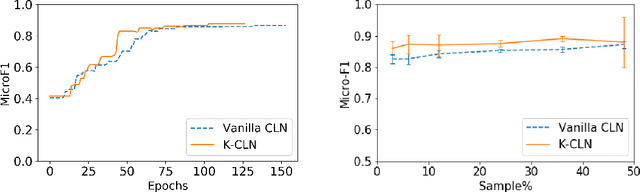
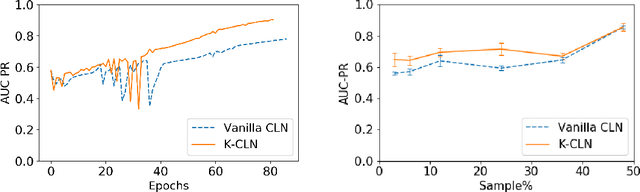
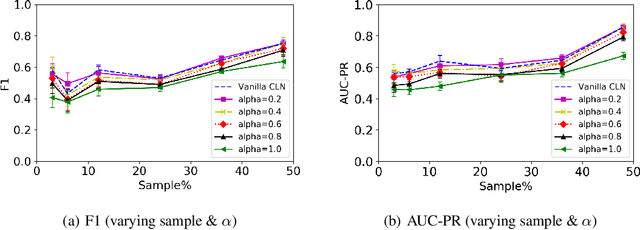
Human-Guided Learning of Column Networks: Augmenting Deep Learning with Advice
Apr 15, 2019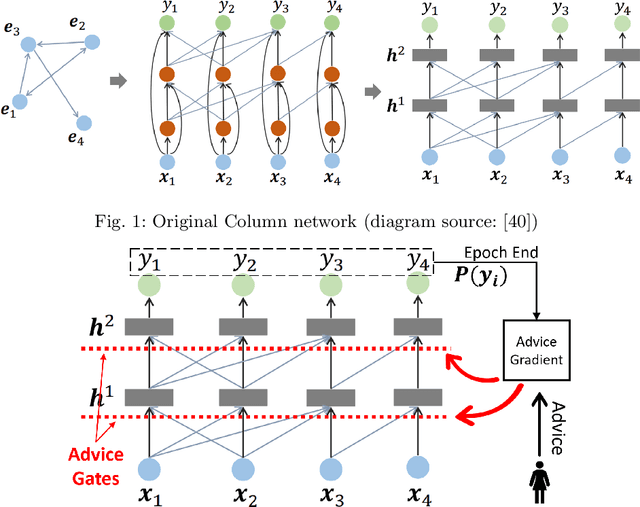

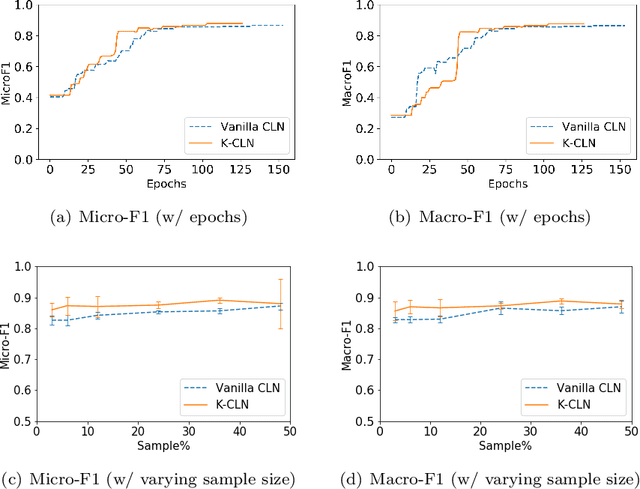
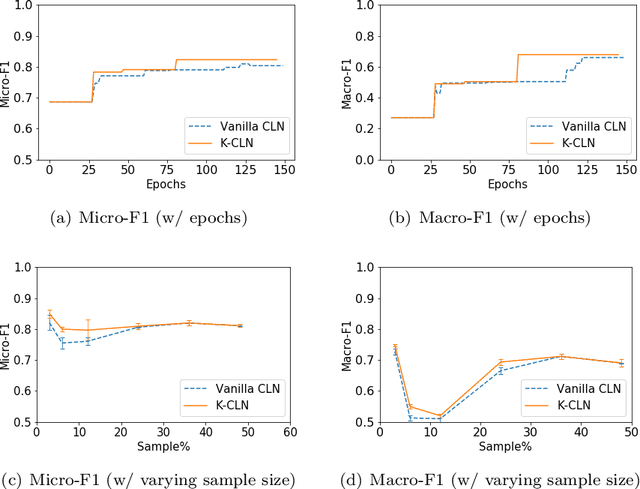
Recently, deep models have been successfully applied in several applications, especially with low-level representations. However, sparse, noisy samples and structured domains (with multiple objects and interactions) are some of the open challenges in most deep models. Column Networks, a deep architecture, can succinctly capture such domain structure and interactions, but may still be prone to sub-optimal learning from sparse and noisy samples. Inspired by the success of human-advice guided learning in AI, especially in data-scarce domains, we propose Knowledge-augmented Column Networks that leverage human advice/knowledge for better learning with noisy/sparse samples. Our experiments demonstrate that our approach leads to either superior overall performance or faster convergence (i.e., both effective and efficient).