 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Samplable Multimodal Observation Model for Global Localization and Kidnapping
Sep 01, 2020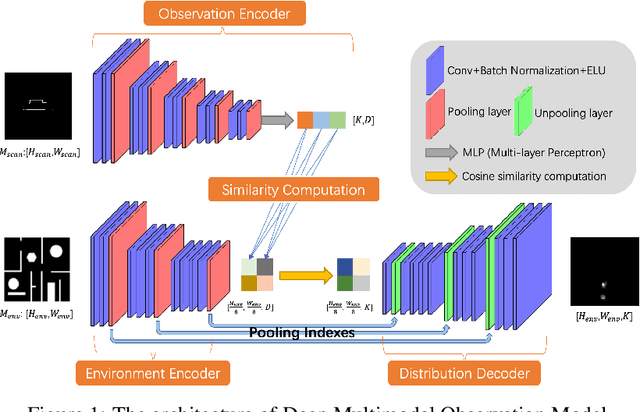


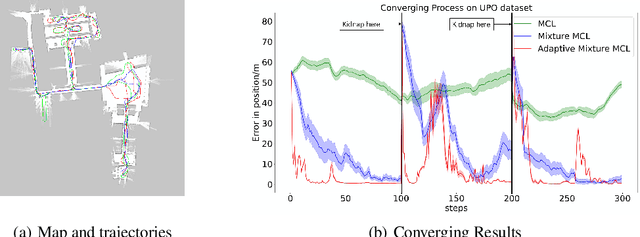
Global localization and kidnapping are two challenging problems in robot localization. The popular method, Monte Carlo Localization (MCL) addresses the problem by sampling uniformly over the state space, which is unfortunately inefficient when the environment is large. To better deal with the the problems, we present a proposal model, named Deep Multimodal Observation Model (DMOM). DMOM takes a map and a 2D laser scan as inputs and outputs a conditional multimodal probability distribution of the pose, making the samples more focusing on the regions with higher likelihood. With such samples, the convergence is expected to be much efficient. Considering that learning based Samplable Observation Model may fail to capture the true pose sometimes, we furthermore propose the Adaptive Mixture MCL, which adaptively selects updating mode for each particle to tolerate this situation. Equipped with DMOM, Adaptive Mixture MCL can achieve more accurate estimation, faster convergence and better scalability compared with previous methods in both synthetic and real scenes. Even in real environment with long-term changing, Adaptive Mixture MCL is able to localize the robot using DMON trained only on simulated observations from a SLAM map, or even a blueprint map.
Dynamic Reconstruction of Deformable Soft-tissue with Stereo Scope in Minimal Invasive Surgery
Mar 22, 2020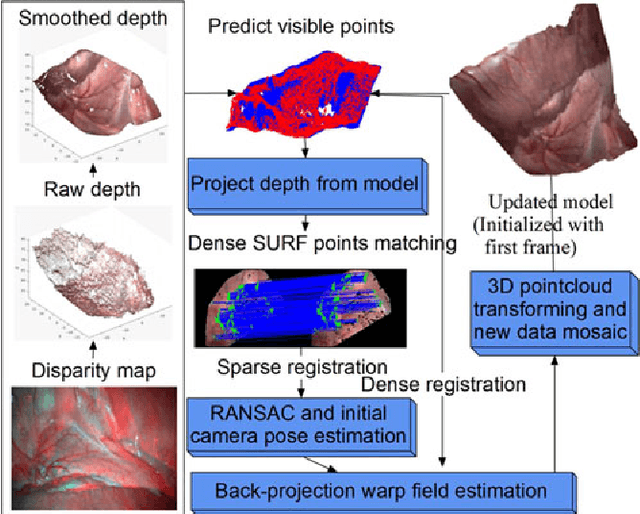
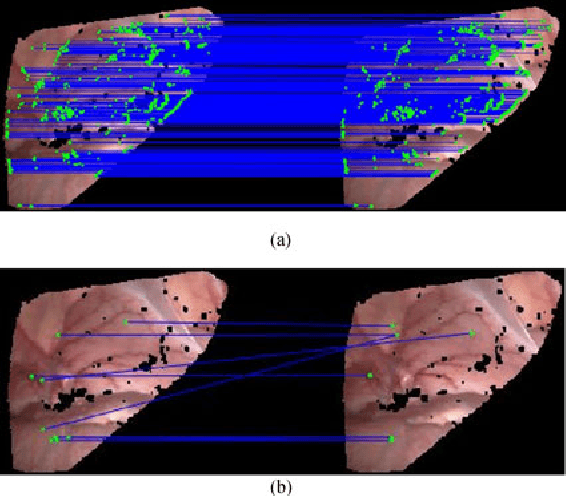
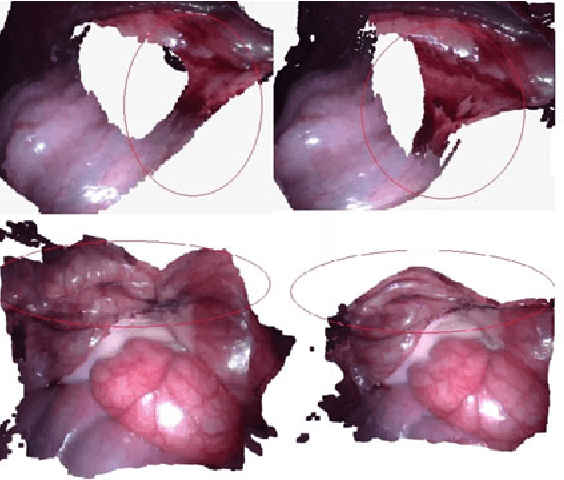

In minimal invasive surgery, it is important to rebuild and visualize the latest deformed shape of soft-tissue surfaces to mitigate tissue damages. This paper proposes an innovative Simultaneous Localization and Mapping (SLAM) algorithm for deformable dense reconstruction of surfaces using a sequence of images from a stereoscope. We introduce a warping field based on the Embedded Deformation (ED) nodes with 3D shapes recovered from consecutive pairs of stereo images. The warping field is estimated by deforming the last updated model to the current live model. Our SLAM system can: (1) Incrementally build a live model by progressively fusing new observations with vivid accurate texture. (2) Estimate the deformed shape of unobserved region with the principle As-Rigid-As-Possible. (3) Show the consecutive shape of models. (4) Estimate the current relative pose between the soft-tissue and the scope. In-vivo experiments with publicly available datasets demonstrate that the 3D models can be incrementally built for different soft-tissues with different deformations from sequences of stereo images obtained by laparoscopes. Results show the potential clinical application of our SLAM system for providing surgeon useful shape and texture information in minimal invasive surgery.
An observable time series based SLAM algorithm for deforming environment
Jun 20, 2019
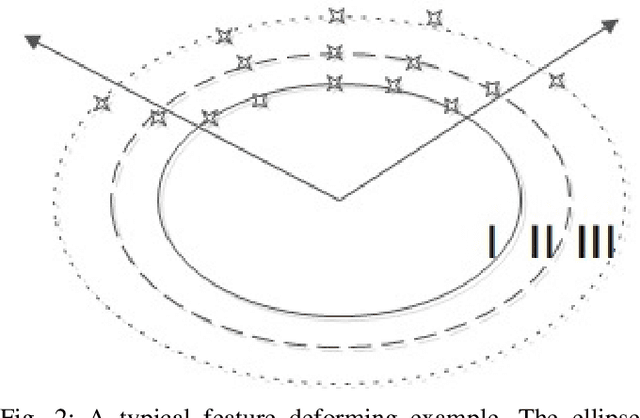


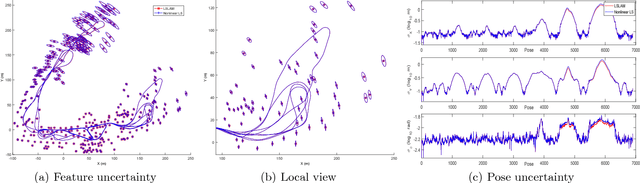
In this paper, we study the back-end of simultaneous localization and mapping (SLAM) problem in deforming environment, where robot localizes itself and tracks multiple non-rigid soft surface using its onboard sensor measurements. An elaborate analysis is conducted on conventional deformation modelling method, Embedded Deformation (ED) graph. We demonstrate and prove that the ED graph widely used in such scenarios is unobservable and leads to multiple solutions unless suitable priors are provided. Example as well as theoretical prove are provided to show the ambiguity of ED graph and camera pose. In modelling non-rigid scenario with ED graph, motion priors of the deforming environment is essential to separate robot pose and deforming environment. The conclusion can be extrapolated to any free form deformation formulation. In solving the observability, this research proposes a preliminary deformable SLAM approach to estimate robot pose in complex environments that exhibits regular motion. A strategy that approximates deformed shape using a linear combination of several previous shapes is proposed to avoid the ambiguity in robot movement and rigid and non-rigid motions of the environment. Fisher information matrix rank analysis with a base case is discussed to prove the effectiveness. Moreover, the proposed algorithm is validated extensively on Monte Carlo simulations and real experiments. It is demonstrated that the new algorithm significantly outperforms conventional rigid SLAM and ED based SLAM especially in scenarios where there is large deformation.
Linear SLAM: Linearising the SLAM Problems using Submap Joining
Sep 18, 2018


The main contribution of this paper is a new submap joining based approach for solving large-scale Simultaneous Localization and Mapping (SLAM) problems. Each local submap is independently built using the local information through solving a small-scale SLAM; the joining of submaps mainly involves solving linear least squares and performing nonlinear coordinate transformations. Through approximating the local submap information as the state estimate and its corresponding information matrix, judiciously selecting the submap coordinate frames, and approximating the joining of a large number of submaps by joining only two maps at a time, either sequentially or in a more efficient Divide and Conquer manner, the nonlinear optimization process involved in most of the existing submap joining approaches is avoided. Thus the proposed submap joining algorithm does not require initial guess or iterations since linear least squares problems have closed-form solutions. The proposed Linear SLAM technique is applicable to feature-based SLAM, pose graph SLAM and D-SLAM, in both two and three dimensions, and does not require any assumption on the character of the covariance matrices. Simulations and experiments are performed to evaluate the proposed Linear SLAM algorithm. Results using publicly available datasets in 2D and 3D show that Linear SLAM produces results that are very close to the best solutions that can be obtained using full nonlinear optimization algorithm started from an accurate initial guess. The C/C++ and MATLAB source codes of Linear SLAM are available on OpenSLAM.
A Radio-Inertial Localization and Tracking System with BLE Beacons Prior Maps
Jul 26, 2018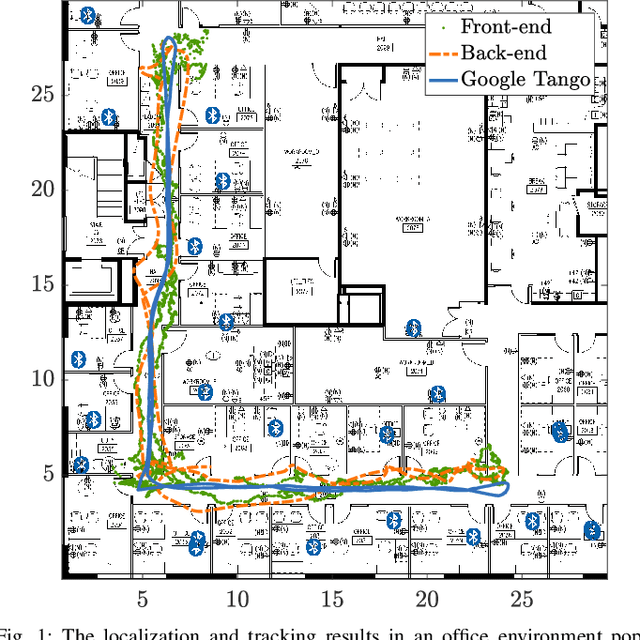
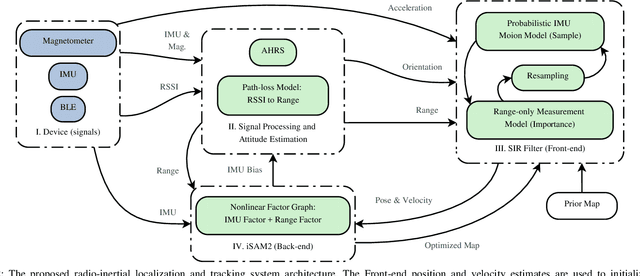
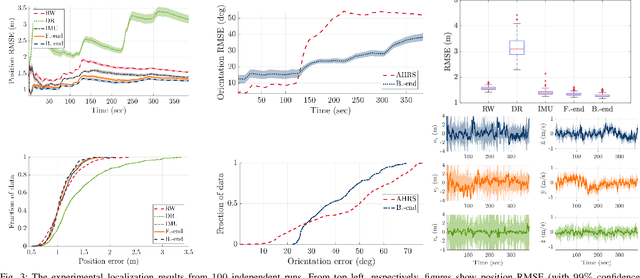

In this paper, we develop a system for the low-cost indoor localization and tracking problem using radio signal strength indicator, Inertial Measurement Unit (IMU), and magnetometer sensors. We develop a novel and simplified probabilistic IMU motion model as the proposal distribution of the sequential Monte-Carlo technique to track the robot trajectory. Our algorithm can globally localize and track a robot with a priori unknown location, given an informative prior map of the Bluetooth Low Energy (BLE) beacons. Also, we formulate the problem as an optimization problem that serves as the Back-end of the algorithm mentioned above (Front-end). Thus, by simultaneously solving for the robot trajectory and the map of BLE beacons, we recover a continuous and smooth trajectory of the robot, corrected locations of the BLE beacons, and the time-varying IMU bias. The evaluations achieved using hardware show that through the proposed closed-loop system the localization performance can be improved; furthermore, the system becomes robust to the error in the map of beacons by feeding back the optimized map to the Front-end.
Parallax Bundle Adjustment on Manifold with Convexified Initialization
Jul 10, 2018
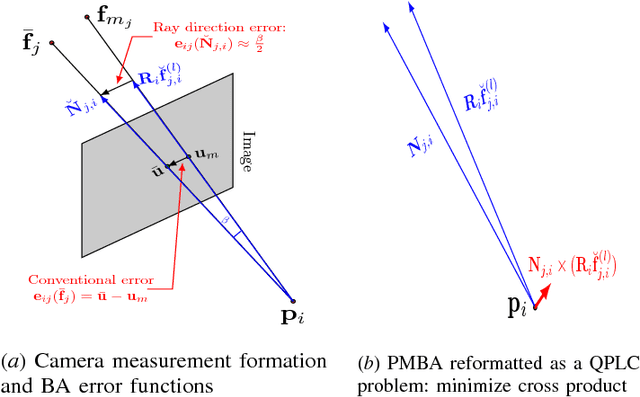
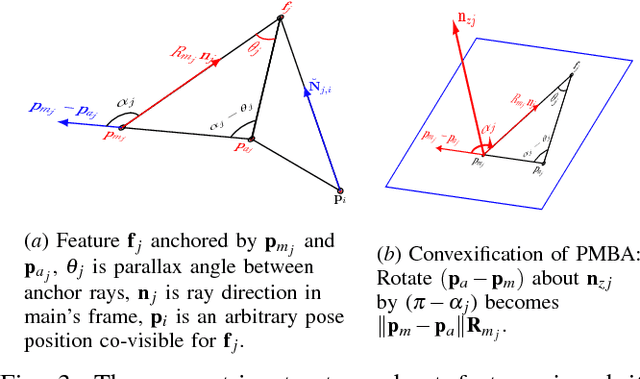

Bundle adjustment (BA) with parallax angle based feature parameterization has been shown to have superior performance over BA using inverse depth or XYZ feature forms. In this paper, we propose an improved version of the parallax BA algorithm (PMBA) by extending it to the manifold domain along with observation-ray based objective function. With this modification, the problem formulation faithfully mimics the projective nature in a camera's image formation, BA is able to achieve better convergence, accuracy and robustness. This is particularly useful in handling diverse outdoor environments and collinear motion modes. Capitalizing on these properties, we further propose a pose-graph simplification to PMBA, with significant dimensionality reduction. This pose-graph model is convex in nature, easy to solve and its solution can serve as a good initial guess to the original BA problem which is intrinsically non-convex. We provide theoretical proof that our global initialization strategy can guarantee a near-optimal solution. Using a series of experiments involving diverse environmental conditions and motions, we demonstrate PMBA's superior convergence performance in comparison to other BA methods. We also show that, without incremental initialization or via third-party information, our global initialization process helps to bootstrap the full BA successfully in various scenarios, sequential or out-of-order, including some datasets from the "Bundle Adjustment in the Large" database.
MIS-SLAM: Real-time Large Scale Dense Deformable SLAM System in Minimal Invasive Surgery Based on Heterogeneous Computing
Mar 27, 2018


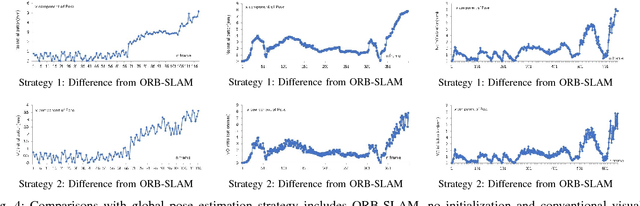
Real-time simultaneously localization and dense mapping is very helpful for providing Virtual Reality and Augmented Reality for surgeons or even surgical robots. In this paper, we propose MIS-SLAM: a complete real-time large scale dense deformable SLAM system with stereoscope in Minimal Invasive Surgery based on heterogeneous computing by making full use of CPU and GPU. Idled CPU is used to perform ORB- SLAM for providing robust global pose. Strategies are taken to integrate modules from CPU and GPU. We solved the key problem raised in previous work, that is, fast movement of scope and blurry images make the scope tracking fail. Benefiting from improved localization, MIS-SLAM can achieve large scale scope localizing and dense mapping in real-time. It transforms and deforms current model and incrementally fuses new observation while keeping vivid texture. In-vivo experiments conducted on publicly available datasets presented in the form of videos demonstrate the feasibility and practicality of MIS-SLAM for potential clinical purpose.
Gaussian Process Autonomous Mapping and Exploration for Range Sensing Mobile Robots
Oct 18, 2017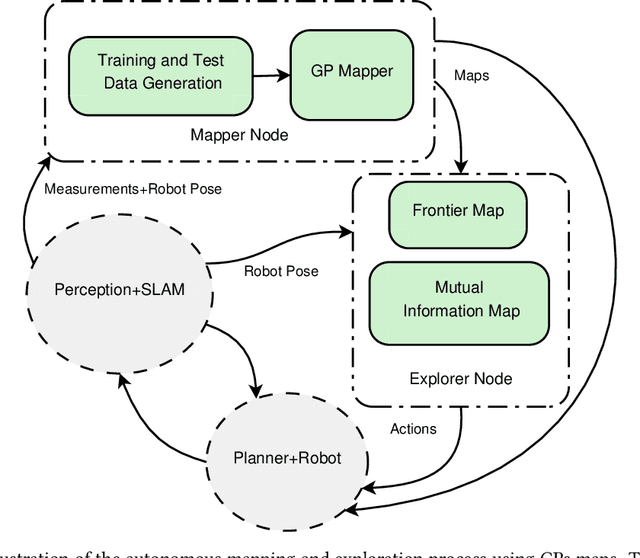
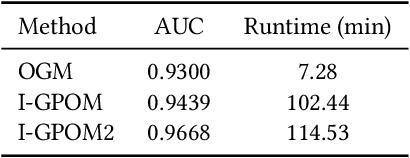
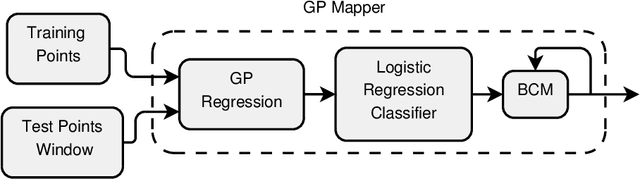
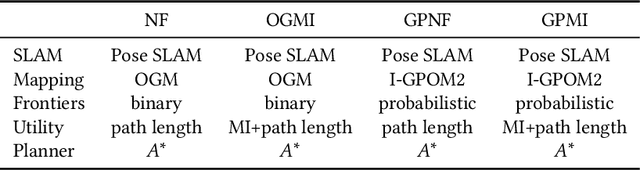
Most of the existing robotic exploration schemes use occupancy grid representations and geometric targets known as frontiers. The occupancy grid representation relies on the assumption of independence between grid cells and ignores structural correlations present in the environment. We develop a Gaussian Processes (GPs) occupancy mapping technique that is computationally tractable for online map building due to its incremental formulation and provides a continuous model of uncertainty over the map spatial coordinates. The standard way to represent geometric frontiers extracted from occupancy maps is to assign binary values to each grid cell. We extend this notion to novel probabilistic frontier maps computed efficiently using the gradient of the GP occupancy map. We also propose a mutual information-based greedy exploration technique built on that representation that takes into account all possible future observations. A major advantage of high-dimensional map inference is the fact that such techniques require fewer observations, leading to a faster map entropy reduction during exploration for map building scenarios. Evaluations using the publicly available datasets show the effectiveness of the proposed framework for robotic mapping and exploration tasks.
Sampling-based Incremental Information Gathering with Applications to Robotic Exploration and Environmental Monitoring
Sep 23, 2017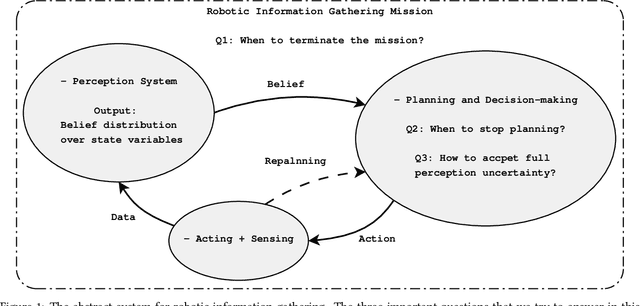

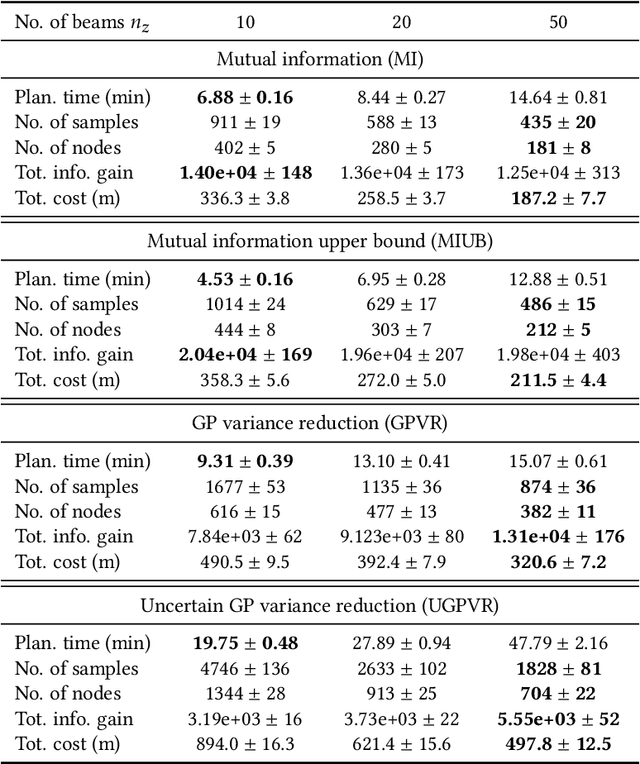
In this article, we propose a sampling-based motion planning algorithm equipped with an information-theoretic convergence criterion for incremental informative motion planning. The proposed approach allows dense map representations and incorporates the full state uncertainty into the planning process. The problem is formulated as a constrained maximization problem. Our approach is built on rapidly-exploring information gathering algorithms and benefits from advantages of sampling-based optimal motion planning algorithms. We propose two information functions and their variants for fast and online computations. We prove an information-theoretic convergence for an entire exploration and information gathering mission based on the least upper bound of the average map entropy. A natural automatic stopping criterion for information-driven motion control results from the convergence analysis. We demonstrate the performance of the proposed algorithms using three scenarios: comparison of the proposed information functions and sensor configuration selection, robotic exploration in unknown environments, and a wireless signal strength monitoring task in a lake from a publicly available dataset collected using an autonomous surface vehicle.
An Invariant-EKF VINS Algorithm for Improving Consistency
Mar 01, 2017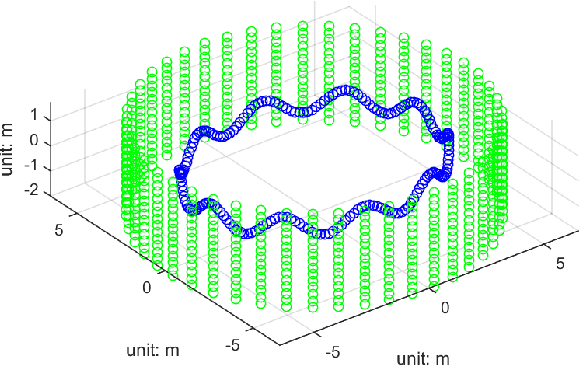
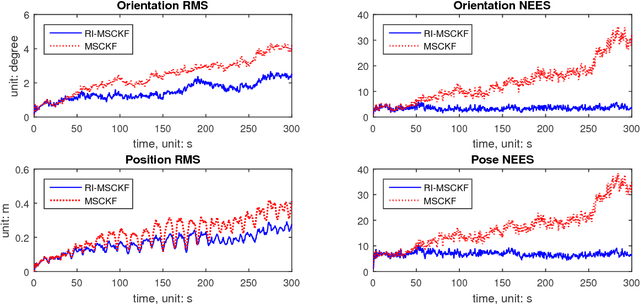
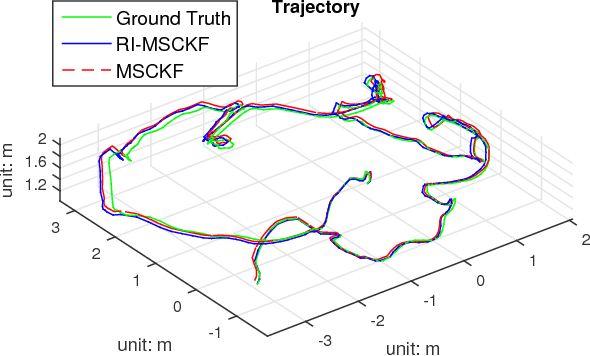
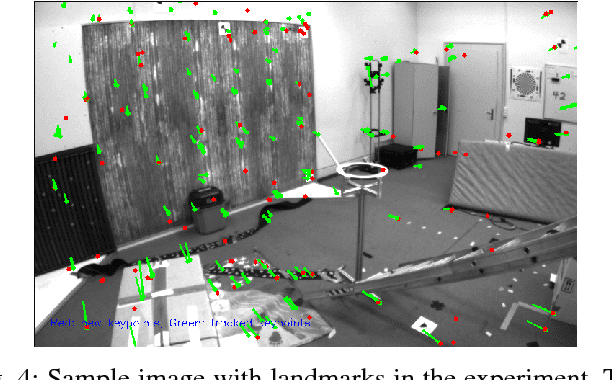
The main contribution of this paper is an invariant extended Kalman filter (EKF) for visual inertial navigation systems (VINS). It is demonstrated that the conventional EKF based VINS is not invariant under the stochastic unobservable transformation, associated with translations and a rotation about the gravitational direction. This can lead to inconsistent state estimates as the estimator does not obey a fundamental property of the physical system. To address this issue, we use a novel uncertainty representation to derive a Right Invariant error extended Kalman filter (RIEKF-VINS) that preserves this invariance property. RIEKF-VINS is then adapted to the multistate constraint Kalman filter framework to obtain a consistent state estimator. Both Monte Carlo simulations and real-world experiments are used to validate the proposed method.