 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePain Intensity Estimation from Mobile Video Using 2D and 3D Facial Keypoints
Jun 17, 2020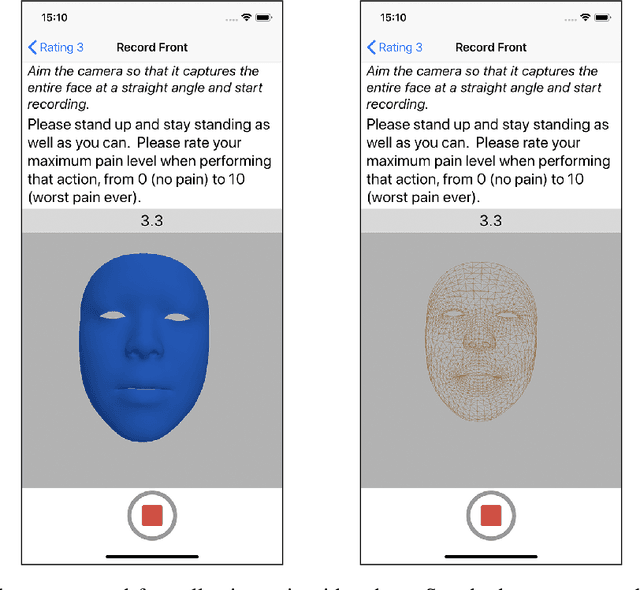
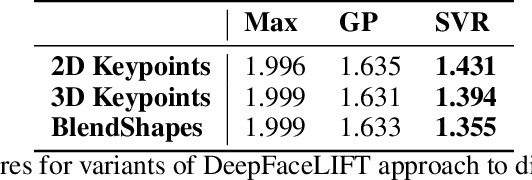

Managing post-surgical pain is critical for successful surgical outcomes. One of the challenges of pain management is accurately assessing the pain level of patients. Self-reported numeric pain ratings are limited because they are subjective, can be affected by mood, and can influence the patient's perception of pain when making comparisons. In this paper, we introduce an approach that analyzes 2D and 3D facial keypoints of post-surgical patients to estimate their pain intensity level. Our approach leverages the previously unexplored capabilities of a smartphone to capture a dense 3D representation of a person's face as input for pain intensity level estimation. Our contributions are adata collection study with post-surgical patients to collect ground-truth labeled sequences of 2D and 3D facial keypoints for developing a pain estimation algorithm, a pain estimation model that uses multiple instance learning to overcome inherent limitations in facial keypoint sequences, and the preliminary results of the pain estimation model using 2D and 3D features with comparisons of alternate approaches.
Combining Deep Learning with Geometric Features for Image based Localization in the Gastrointestinal Tract
May 13, 2020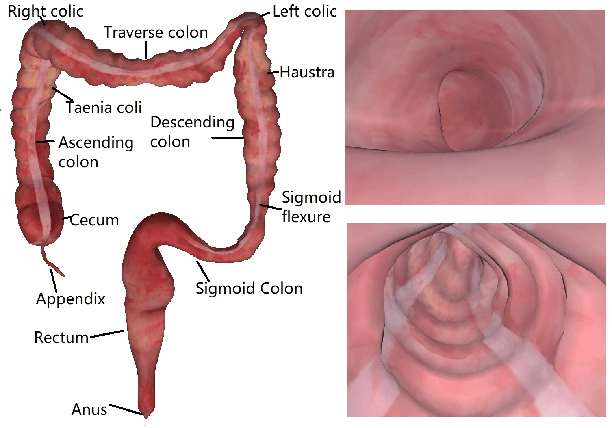

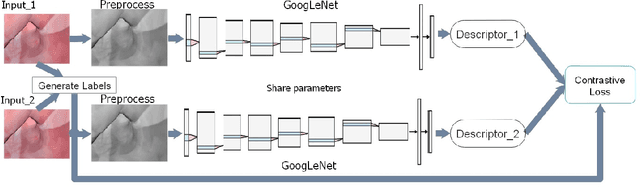
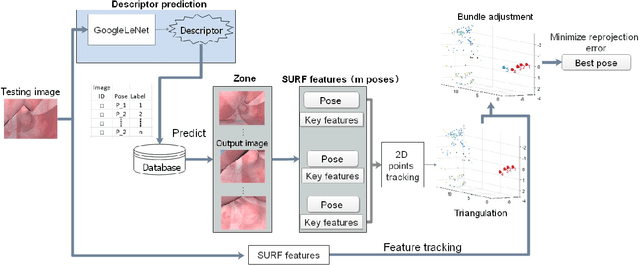
Tracking monocular colonoscope in the Gastrointestinal tract (GI) is a challenging problem as the images suffer from deformation, blurred textures, significant changes in appearance. They greatly restrict the tracking ability of conventional geometry based methods. Even though Deep Learning (DL) can overcome these issues, limited labeling data is a roadblock to state-of-art DL method. Considering these, we propose a novel approach to combine DL method with traditional feature based approach to achieve better localization with small training data. Our method fully exploits the best of both worlds by introducing a Siamese network structure to perform few-shot classification to the closest zone in the segmented training image set. The classified label is further adopted to initialize the pose of scope. To fully use the training dataset, a pre-generated triangulated map points within the zone in the training set are registered with observation and contribute to estimating the optimal pose of the test image. The proposed hybrid method is extensively tested and compared with existing methods, and the result shows significant improvement over traditional geometric based or DL based localization. The accuracy is improved by 28.94% (Position) and 10.97% (Orientation) with respect to state-of-art method.
A Radio-Inertial Localization and Tracking System with BLE Beacons Prior Maps
Jul 26, 2018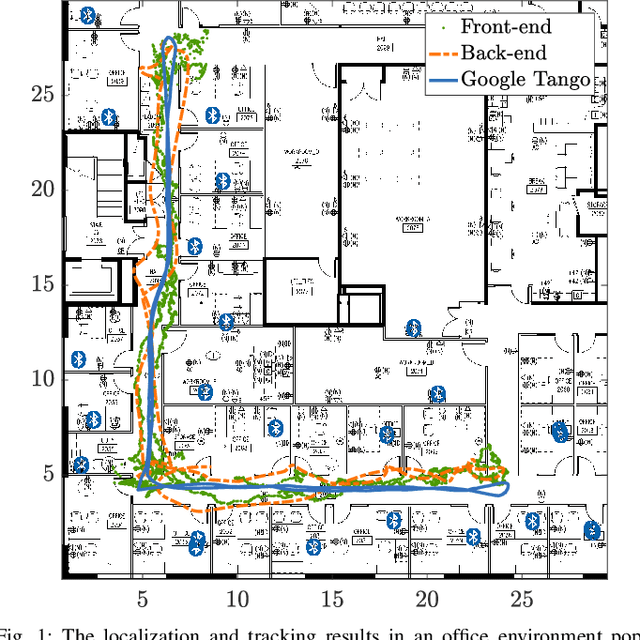
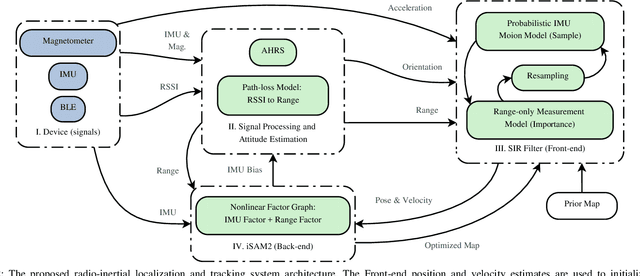
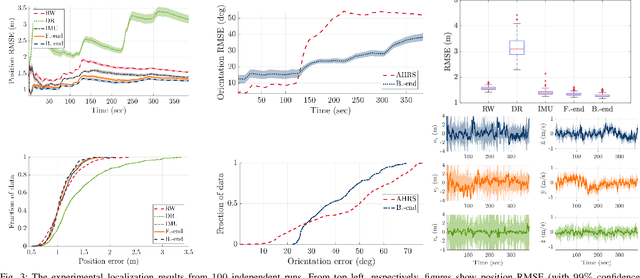

In this paper, we develop a system for the low-cost indoor localization and tracking problem using radio signal strength indicator, Inertial Measurement Unit (IMU), and magnetometer sensors. We develop a novel and simplified probabilistic IMU motion model as the proposal distribution of the sequential Monte-Carlo technique to track the robot trajectory. Our algorithm can globally localize and track a robot with a priori unknown location, given an informative prior map of the Bluetooth Low Energy (BLE) beacons. Also, we formulate the problem as an optimization problem that serves as the Back-end of the algorithm mentioned above (Front-end). Thus, by simultaneously solving for the robot trajectory and the map of BLE beacons, we recover a continuous and smooth trajectory of the robot, corrected locations of the BLE beacons, and the time-varying IMU bias. The evaluations achieved using hardware show that through the proposed closed-loop system the localization performance can be improved; furthermore, the system becomes robust to the error in the map of beacons by feeding back the optimized map to the Front-end.