 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCycleIK: Neuro-inspired Inverse Kinematics
Jul 21, 2023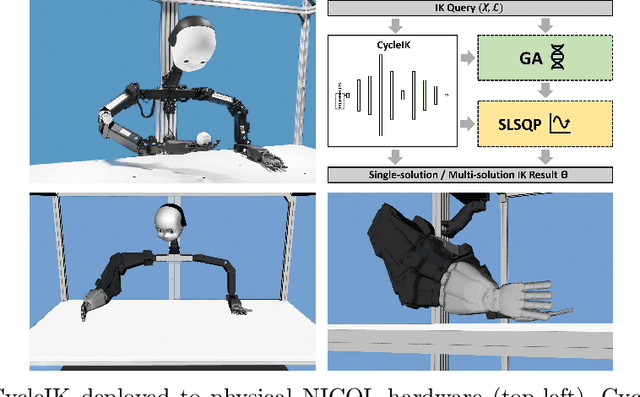

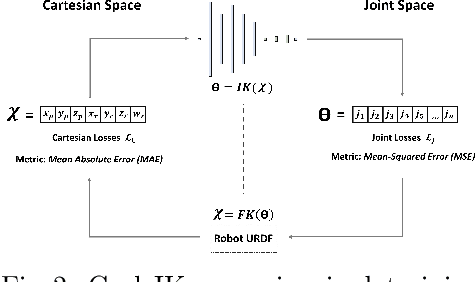
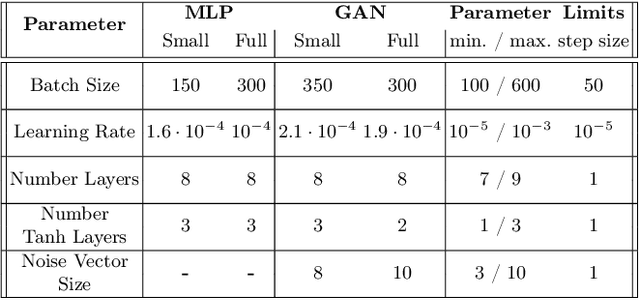
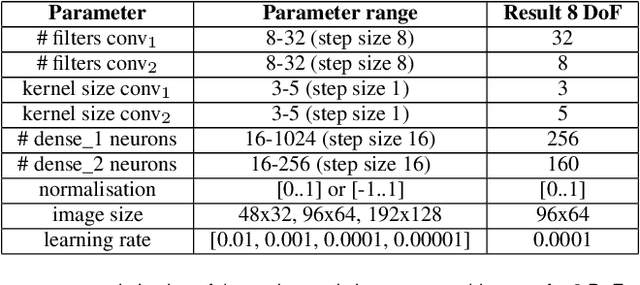
The paper introduces CycleIK, a neuro-robotic approach that wraps two novel neuro-inspired methods for the inverse kinematics (IK) task, a Generative Adversarial Network (GAN), and a Multi-Layer Perceptron architecture. These methods can be used in a standalone fashion, but we also show how embedding these into a hybrid neuro-genetic IK pipeline allows for further optimization via sequential least-squares programming (SLSQP) or a genetic algorithm (GA). The models are trained and tested on dense datasets that were collected from random robot configurations of the new Neuro-Inspired COLlaborator (NICOL), a semi-humanoid robot with two redundant 8-DoF manipulators. We utilize the weighted multi-objective function from the state-of-the-art BioIK method to support the training process and our hybrid neuro-genetic architecture. We show that the neural models can compete with state-of-the-art IK approaches, which allows for deployment directly to robotic hardware. Additionally, it is shown that the incorporation of the genetic algorithm improves the precision while simultaneously reducing the overall runtime.
The Emotional Dilemma: Influence of a Human-like Robot on Trust and Cooperation
Jul 06, 2023Increasing anthropomorphic robot behavioral design could affect trust and cooperation positively. However, studies have shown contradicting results and suggest a task-dependent relationship between robots that display emotions and trust. Therefore, this study analyzes the effect of robots that display human-like emotions on trust, cooperation, and participants' emotions. In the between-group study, participants play the coin entrustment game with an emotional and a non-emotional robot. The results show that the robot that displays emotions induces more anxiety than the neutral robot. Accordingly, the participants trust the emotional robot less and are less likely to cooperate. Furthermore, the perceived intelligence of a robot increases trust, while a desire to outcompete the robot can reduce trust and cooperation. Thus, the design of robots expressing emotions should be task dependent to avoid adverse effects that reduce trust and cooperation.
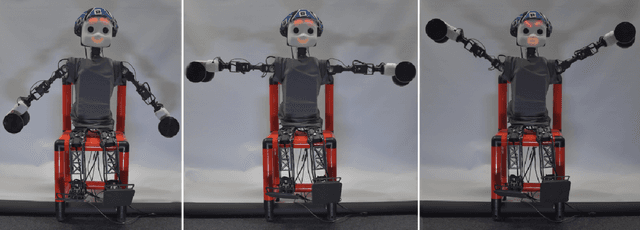
NICOL: A Neuro-inspired Collaborative Semi-humanoid Robot that Bridges Social Interaction and Reliable Manipulation
May 15, 2023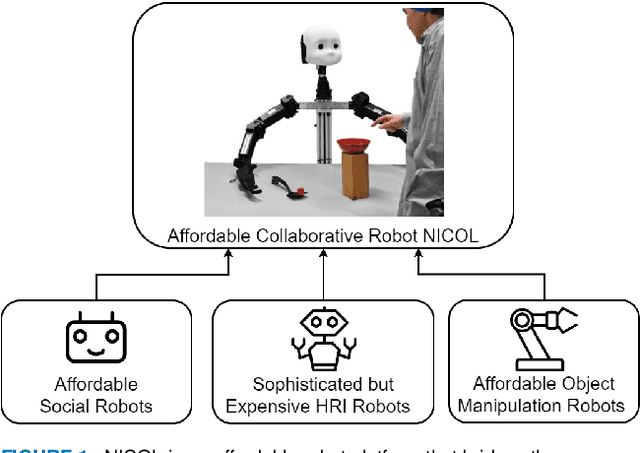
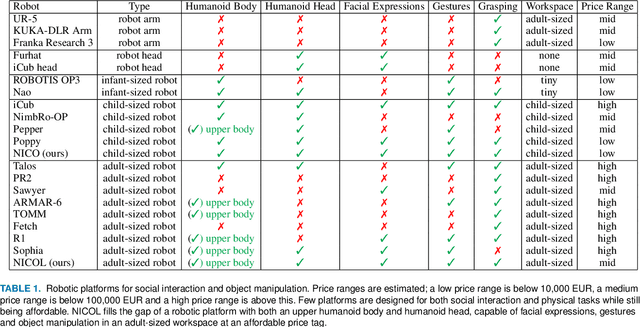

Robotic platforms that can efficiently collaborate with humans in physical tasks constitute a major goal in robotics. However, many existing robotic platforms are either designed for social interaction or industrial object manipulation tasks. The design of collaborative robots seldom emphasizes both their social interaction and physical collaboration abilities. To bridge this gap, we present the novel semi-humanoid NICOL, the Neuro-Inspired COLlaborator. NICOL is a large, newly designed, scaled-up version of its well-evaluated predecessor, the Neuro-Inspired COmpanion (NICO). While we adopt NICO's head and facial expression display, we extend its manipulation abilities in terms of precision, object size and workspace size. To introduce and evaluate NICOL, we first develop and extend different neural and hybrid neuro-genetic visuomotor approaches initially developed for the NICO to the larger NICOL and its more complex kinematics. Furthermore, we present a novel neuro-genetic approach that improves the grasp accuracy of the NICOL to over 99%, outperforming the state-of-the-art IK solvers KDL, TRACK-IK and BIO-IK. Furthermore, we introduce the social interaction capabilities of NICOL, including the auditory and visual capabilities, but also the face and emotion generation capabilities. Overall, this article presents for the first time the humanoid robot NICOL and, thereby, with the neuro-genetic approaches, contributes to the integration of social robotics and neural visuomotor learning for humanoid robots.
Judging by the Look: The Impact of Robot Gaze Strategies on Human Cooperation
Aug 25, 2022
Human eye gaze plays an important role in delivering information, communicating intent, and understanding others' mental states. Previous research shows that a robot's gaze can also affect humans' decision-making and strategy during an interaction. However, limited studies have trained humanoid robots on gaze-based data in human-robot interaction scenarios. Considering gaze impacts the naturalness of social exchanges and alters the decision process of an observer, it should be regarded as a crucial component in human-robot interaction. To investigate the impact of robot gaze on humans, we propose an embodied neural model for performing human-like gaze shifts. This is achieved by extending a social attention model and training it on eye-tracking data, collected by watching humans playing a game. We will compare human behavioral performances in the presence of a robot adopting different gaze strategies in a human-human cooperation game.
Explain yourself! Effects of Explanations in Human-Robot Interaction
Apr 09, 2022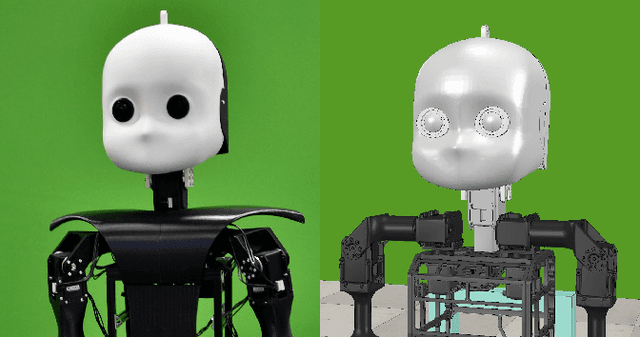
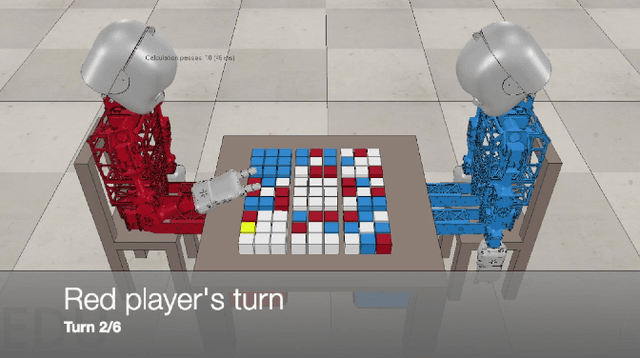
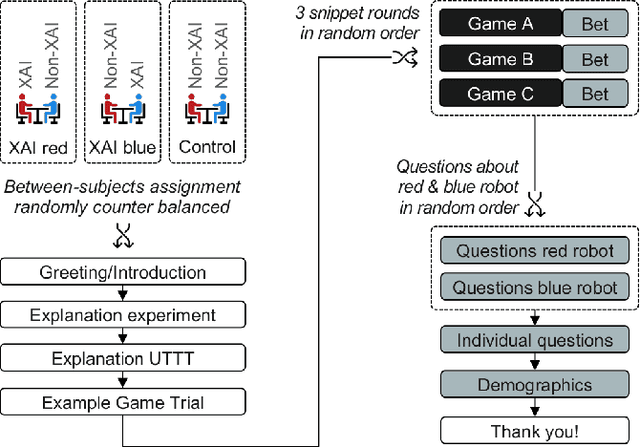
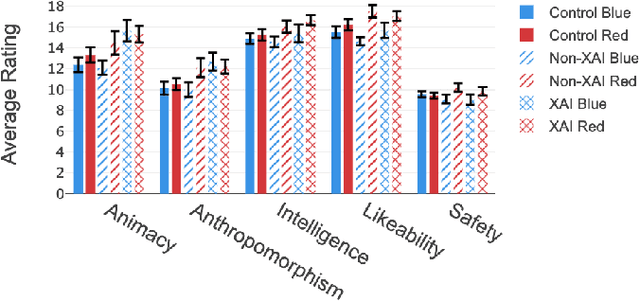
Recent developments in explainable artificial intelligence promise the potential to transform human-robot interaction: Explanations of robot decisions could affect user perceptions, justify their reliability, and increase trust. However, the effects on human perceptions of robots that explain their decisions have not been studied thoroughly. To analyze the effect of explainable robots, we conduct a study in which two simulated robots play a competitive board game. While one robot explains its moves, the other robot only announces them. Providing explanations for its actions was not sufficient to change the perceived competence, intelligence, likeability or safety ratings of the robot. However, the results show that the robot that explains its moves is perceived as more lively and human-like. This study demonstrates the need for and potential of explainable human-robot interaction and the wider assessment of its effects as a novel research direction.
A trained humanoid robot can perform human-like crossmodal social attention conflict resolution
Nov 02, 2021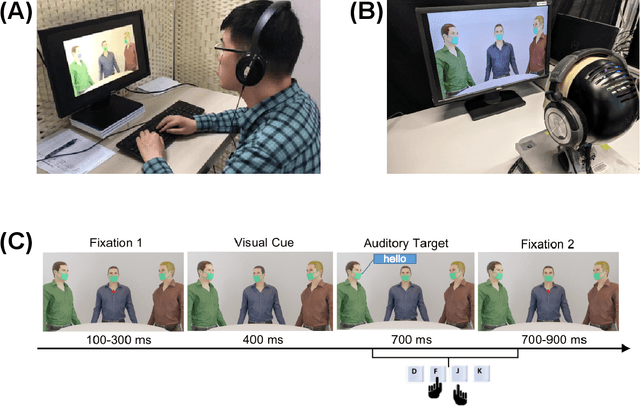
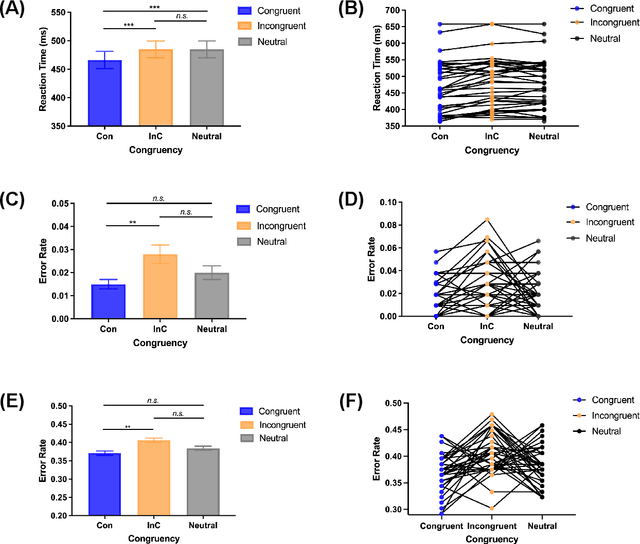
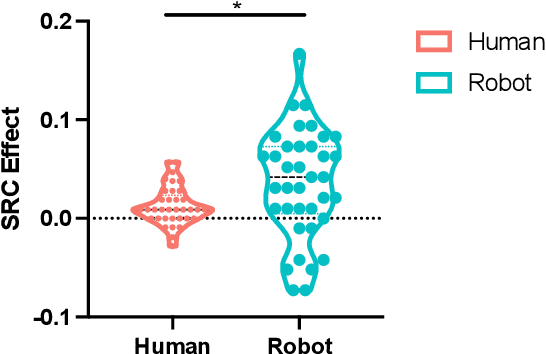
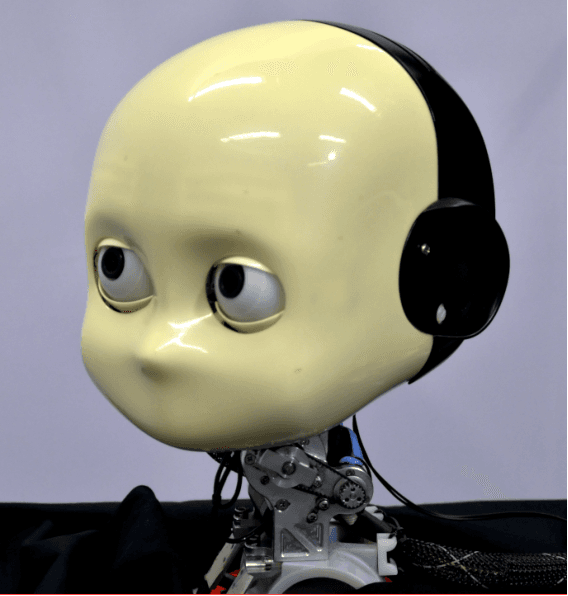
Due to the COVID-19 pandemic, robots could be seen as potential resources in tasks like helping people work remotely, sustaining social distancing, and improving mental or physical health. To enhance human-robot interaction, it is essential for robots to become more socialised, via processing multiple social cues in a complex real-world environment. Our study adopted a neurorobotic paradigm of gaze-triggered audio-visual crossmodal integration to make an iCub robot express human-like social attention responses. At first, a behavioural experiment was conducted on 37 human participants. To improve ecological validity, a round-table meeting scenario with three masked animated avatars was designed with the middle one capable of performing gaze shift, and the other two capable of generating sound. The gaze direction and the sound location are either congruent or incongruent. Masks were used to cover all facial visual cues other than the avatars' eyes. We observed that the avatar's gaze could trigger crossmodal social attention with better human performance in the audio-visual congruent condition than in the incongruent condition. Then, our computational model, GASP, was trained to implement social cue detection, audio-visual saliency prediction, and selective attention. After finishing the model training, the iCub robot was exposed to similar laboratory conditions as human participants, demonstrating that it can replicate similar attention responses as humans regarding the congruency and incongruency performance, while overall the human performance was still superior. Therefore, this interdisciplinary work provides new insights on mechanisms of crossmodal social attention and how it can be modelled in robots in a complex environment.
Exercise with Social Robots: Companion or Coach?
Mar 24, 2021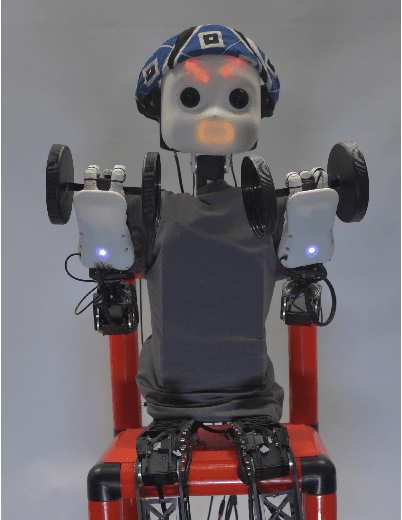
In this paper, we investigate the roles that social robots can take in physical exercise with human partners. In related work, robots or virtual intelligent agents take the role of a coach or instructor whereas in other approaches they are used as motivational aids. These are two "paradigms", so to speak, within the small but growing area of robots for social exercise. We designed an online questionnaire to test whether the preferred role in which people want to see robots would be the companion or the coach. The questionnaire asks people to imagine working out with a robot with the help of three utilized questionnaires: (1) CART-Q which is used for judging coach-athlete relationships, (2) the mind perception questionnaire and (3) the System Usability Scale (SUS). We present the methodology, some preliminary results as well as our intended future work on personal robots for coaching.
Deep Neural Object Analysis by Interactive Auditory Exploration with a Humanoid Robot
Jul 10, 2018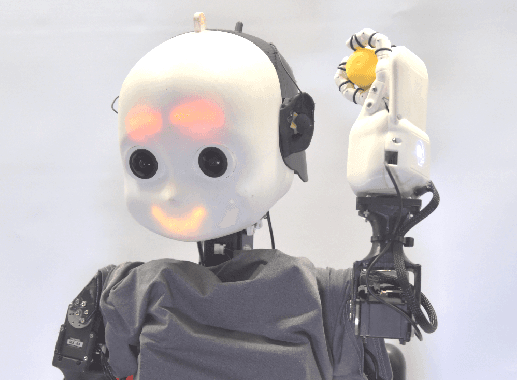
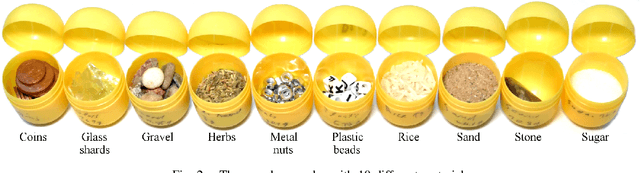
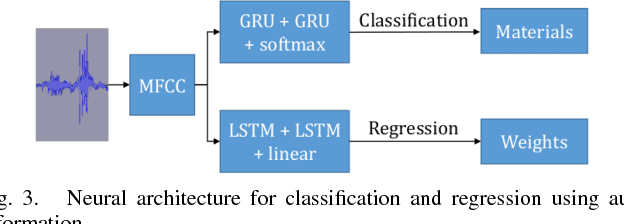
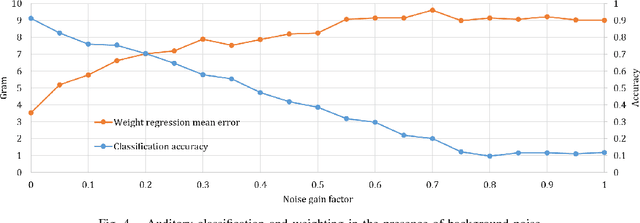
We present a novel approach for interactive auditory object analysis with a humanoid robot. The robot elicits sensory information by physically shaking visually indistinguishable plastic capsules. It gathers the resulting audio signals from microphones that are embedded into the robotic ears. A neural network architecture learns from these signals to analyze properties of the contents of the containers. Specifically, we evaluate the material classification and weight prediction accuracy and demonstrate that the framework is fairly robust to acoustic real-world noise.