 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Learning a Generalizable 3D Scene Representation from 2D Observations
Feb 11, 2026We introduce a Generalizable Neural Radiance Field approach for predicting 3D workspace occupancy from egocentric robot observations. Unlike prior methods operating in camera-centric coordinates, our model constructs occupancy representations in a global workspace frame, making it directly applicable to robotic manipulation. The model integrates flexible source views and generalizes to unseen object arrangements without scene-specific finetuning. We demonstrate the approach on a humanoid robot and evaluate predicted geometry against 3D sensor ground truth. Trained on 40 real scenes, our model achieves 26mm reconstruction error, including occluded regions, validating its ability to infer complete 3D occupancy beyond traditional stereo vision methods.
Keypoint-based Diffusion for Robotic Motion Planning on the NICOL Robot
Sep 04, 2025We propose a novel diffusion-based action model for robotic motion planning. Commonly, established numerical planning approaches are used to solve general motion planning problems, but have significant runtime requirements. By leveraging the power of deep learning, we are able to achieve good results in a much smaller runtime by learning from a dataset generated by these planners. While our initial model uses point cloud embeddings in the input to predict keypoint-based joint sequences in its output, we observed in our ablation study that it remained challenging to condition the network on the point cloud embeddings. We identified some biases in our dataset and refined it, which improved the model's performance. Our model, even without the use of the point cloud encodings, outperforms numerical models by an order of magnitude regarding the runtime, while reaching a success rate of up to 90% of collision free solutions on the test set.
Shaken, Not Stirred: A Novel Dataset for Visual Understanding of Glasses in Human-Robot Bartending Tasks
Mar 06, 2025



Datasets for object detection often do not account for enough variety of glasses, due to their transparent and reflective properties. Specifically, open-vocabulary object detectors, widely used in embodied robotic agents, fail to distinguish subclasses of glasses. This scientific gap poses an issue to robotic applications that suffer from accumulating errors between detection, planning, and action execution. The paper introduces a novel method for the acquisition of real-world data from RGB-D sensors that minimizes human effort. We propose an auto-labeling pipeline that generates labels for all the acquired frames based on the depth measurements. We provide a novel real-world glass object dataset that was collected on the Neuro-Inspired COLlaborator (NICOL), a humanoid robot platform. The data set consists of 7850 images recorded from five different cameras. We show that our trained baseline model outperforms state-of-the-art open-vocabulary approaches. In addition, we deploy our baseline model in an embodied agent approach to the NICOL platform, on which it achieves a success rate of 81% in a human-robot bartending scenario.
Inverse Kinematics for Neuro-Robotic Grasping with Humanoid Embodied Agents
Apr 12, 2024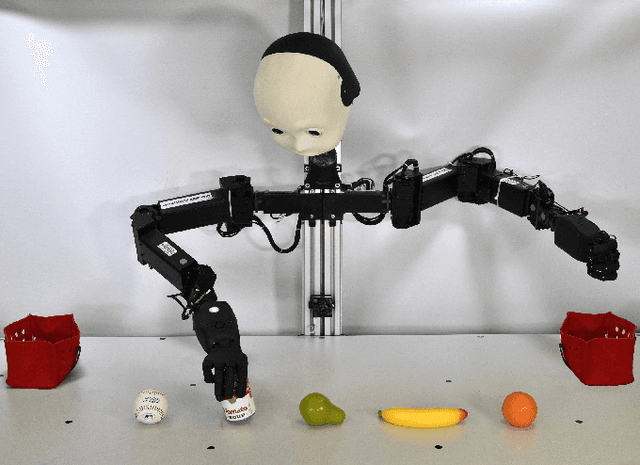
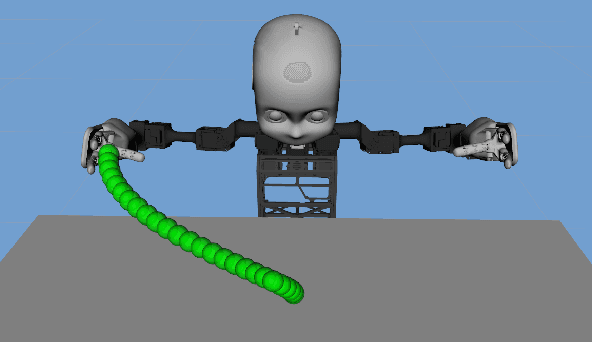
This paper introduces a novel zero-shot motion planning method that allows users to quickly design smooth robot motions in Cartesian space. A B\'ezier curve-based Cartesian plan is transformed into a joint space trajectory by our neuro-inspired inverse kinematics (IK) method CycleIK, for which we enable platform independence by scaling it to arbitrary robot designs. The motion planner is evaluated on the physical hardware of the two humanoid robots NICO and NICOL in a human-in-the-loop grasping scenario. Our method is deployed with an embodied agent that is a large language model (LLM) at its core. We generalize the embodied agent, that was introduced for NICOL, to also be embodied by NICO. The agent can execute a discrete set of physical actions and allows the user to verbally instruct various different robots. We contribute a grasping primitive to its action space that allows for precise manipulation of household objects. The new CycleIK method is compared to popular numerical IK solvers and state-of-the-art neural IK methods in simulation and is shown to be competitive with or outperform all evaluated methods when the algorithm runtime is very short. The grasping primitive is evaluated on both NICOL and NICO robots with a reported grasp success of 72% to 82% for each robot, respectively.
CycleIK: Neuro-inspired Inverse Kinematics
Jul 21, 2023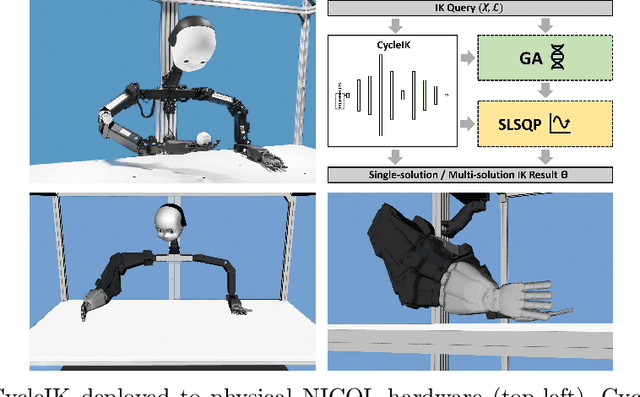

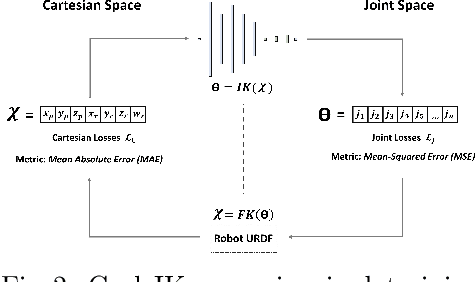
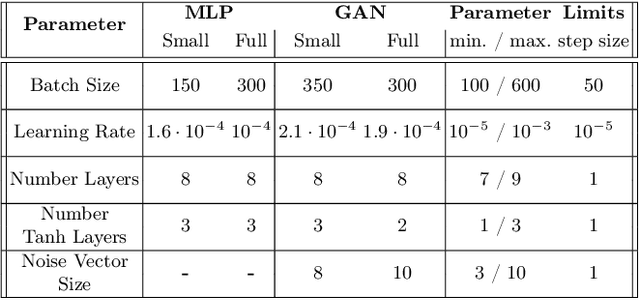
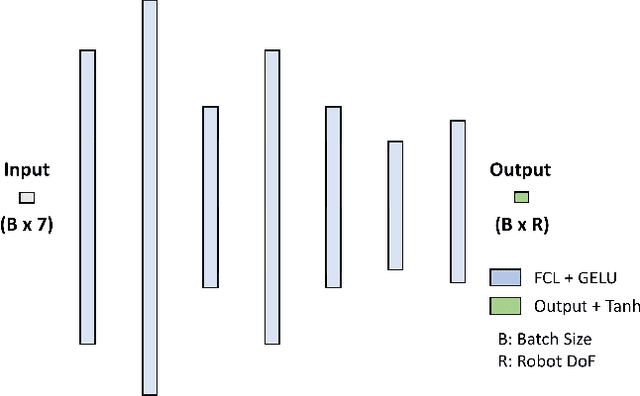
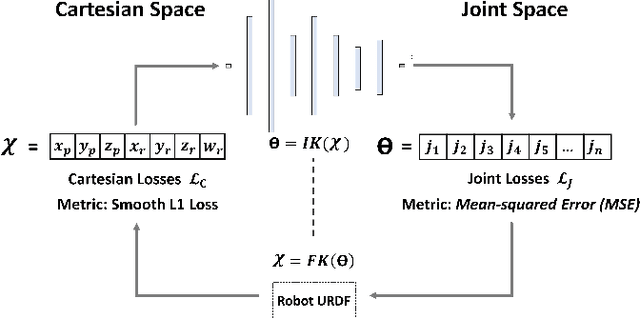
The paper introduces CycleIK, a neuro-robotic approach that wraps two novel neuro-inspired methods for the inverse kinematics (IK) task, a Generative Adversarial Network (GAN), and a Multi-Layer Perceptron architecture. These methods can be used in a standalone fashion, but we also show how embedding these into a hybrid neuro-genetic IK pipeline allows for further optimization via sequential least-squares programming (SLSQP) or a genetic algorithm (GA). The models are trained and tested on dense datasets that were collected from random robot configurations of the new Neuro-Inspired COLlaborator (NICOL), a semi-humanoid robot with two redundant 8-DoF manipulators. We utilize the weighted multi-objective function from the state-of-the-art BioIK method to support the training process and our hybrid neuro-genetic architecture. We show that the neural models can compete with state-of-the-art IK approaches, which allows for deployment directly to robotic hardware. Additionally, it is shown that the incorporation of the genetic algorithm improves the precision while simultaneously reducing the overall runtime.
NICOL: A Neuro-inspired Collaborative Semi-humanoid Robot that Bridges Social Interaction and Reliable Manipulation
May 15, 2023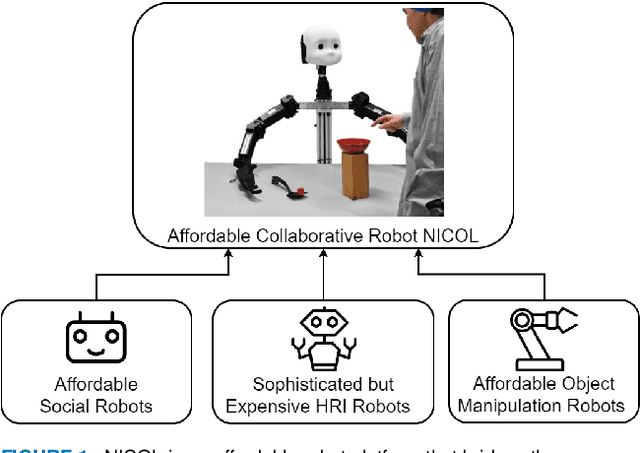
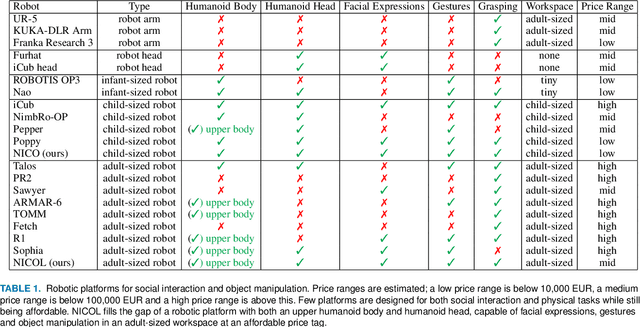

Robotic platforms that can efficiently collaborate with humans in physical tasks constitute a major goal in robotics. However, many existing robotic platforms are either designed for social interaction or industrial object manipulation tasks. The design of collaborative robots seldom emphasizes both their social interaction and physical collaboration abilities. To bridge this gap, we present the novel semi-humanoid NICOL, the Neuro-Inspired COLlaborator. NICOL is a large, newly designed, scaled-up version of its well-evaluated predecessor, the Neuro-Inspired COmpanion (NICO). While we adopt NICO's head and facial expression display, we extend its manipulation abilities in terms of precision, object size and workspace size. To introduce and evaluate NICOL, we first develop and extend different neural and hybrid neuro-genetic visuomotor approaches initially developed for the NICO to the larger NICOL and its more complex kinematics. Furthermore, we present a novel neuro-genetic approach that improves the grasp accuracy of the NICOL to over 99%, outperforming the state-of-the-art IK solvers KDL, TRACK-IK and BIO-IK. Furthermore, we introduce the social interaction capabilities of NICOL, including the auditory and visual capabilities, but also the face and emotion generation capabilities. Overall, this article presents for the first time the humanoid robot NICOL and, thereby, with the neuro-genetic approaches, contributes to the integration of social robotics and neural visuomotor learning for humanoid robots.