 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetecting 3D Line Segments for 6DoF Pose Estimation with Limited Data
Jan 17, 2026The task of 6DoF object pose estimation is one of the fundamental problems of 3D vision with many practical applications such as industrial automation. Traditional deep learning approaches for this task often require extensive training data or CAD models, limiting their application in real-world industrial settings where data is scarce and object instances vary. We propose a novel method for 6DoF pose estimation focused specifically on bins used in industrial settings. We exploit the cuboid geometry of bins by first detecting intermediate 3D line segments corresponding to their top edges. Our approach extends the 2D line segment detection network LeTR to operate on structured point cloud data. The detected 3D line segments are then processed using a simple geometric procedure to robustly determine the bin's 6DoF pose. To evaluate our method, we extend an existing dataset with a newly collected and annotated dataset, which we make publicly available. We show that incorporating synthetic training data significantly improves pose estimation accuracy on real scans. Moreover, we show that our method significantly outperforms current state-of-the-art 6DoF pose estimation methods in terms of the pose accuracy (3 cm translation error, 8.2$^\circ$ rotation error) while not requiring instance-specific CAD models during inference.
Decentralized Privacy-Preserving Federal Learning of Computer Vision Models on Edge Devices
Jan 08, 2026Collaborative training of a machine learning model comes with a risk of sharing sensitive or private data. Federated learning offers a way of collectively training a single global model without the need to share client data, by sharing only the updated parameters from each client's local model. A central server is then used to aggregate parameters from all clients and redistribute the aggregated model back to the clients. Recent findings have shown that even in this scenario, private data can be reconstructed only using information about model parameters. Current efforts to mitigate this are mainly focused on reducing privacy risks on the server side, assuming that other clients will not act maliciously. In this work, we analyzed various methods for improving the privacy of client data concerning both the server and other clients for neural networks. Some of these methods include homomorphic encryption, gradient compression, gradient noising, and discussion on possible usage of modified federated learning systems such as split learning, swarm learning or fully encrypted models. We have analyzed the negative effects of gradient compression and gradient noising on the accuracy of convolutional neural networks used for classification. We have shown the difficulty of data reconstruction in the case of segmentation networks. We have also implemented a proof of concept on the NVIDIA Jetson TX2 module used in edge devices and simulated a federated learning process.
Pointing-Guided Target Estimation via Transformer-Based Attention
Sep 05, 2025Deictic gestures, like pointing, are a fundamental form of non-verbal communication, enabling humans to direct attention to specific objects or locations. This capability is essential in Human-Robot Interaction (HRI), where robots should be able to predict human intent and anticipate appropriate responses. In this work, we propose the Multi-Modality Inter-TransFormer (MM-ITF), a modular architecture to predict objects in a controlled tabletop scenario with the NICOL robot, where humans indicate targets through natural pointing gestures. Leveraging inter-modality attention, MM-ITF maps 2D pointing gestures to object locations, assigns a likelihood score to each, and identifies the most likely target. Our results demonstrate that the method can accurately predict the intended object using monocular RGB data, thus enabling intuitive and accessible human-robot collaboration. To evaluate the performance, we introduce a patch confusion matrix, providing insights into the model's predictions across candidate object locations. Code available at: https://github.com/lucamuellercode/MMITF.
Efficient Vision-based Vehicle Speed Estimation
May 02, 2025This paper presents a computationally efficient method for vehicle speed estimation from traffic camera footage. Building upon previous work that utilizes 3D bounding boxes derived from 2D detections and vanishing point geometry, we introduce several improvements to enhance real-time performance. We evaluate our method in several variants on the BrnoCompSpeed dataset in terms of vehicle detection and speed estimation accuracy. Our extensive evaluation across various hardware platforms, including edge devices, demonstrates significant gains in frames per second (FPS) compared to the prior state-of-the-art, while maintaining comparable or improved speed estimation accuracy. We analyze the trade-off between accuracy and computational cost, showing that smaller models utilizing post-training quantization offer the best balance for real-world deployment. Our best performing model beats previous state-of-the-art in terms of median vehicle speed estimation error (0.58 km/h vs. 0.60 km/h), detection precision (91.02% vs 87.08%) and recall (91.14% vs. 83.32%) while also being 5.5 times faster.
Shaken, Not Stirred: A Novel Dataset for Visual Understanding of Glasses in Human-Robot Bartending Tasks
Mar 06, 2025



Datasets for object detection often do not account for enough variety of glasses, due to their transparent and reflective properties. Specifically, open-vocabulary object detectors, widely used in embodied robotic agents, fail to distinguish subclasses of glasses. This scientific gap poses an issue to robotic applications that suffer from accumulating errors between detection, planning, and action execution. The paper introduces a novel method for the acquisition of real-world data from RGB-D sensors that minimizes human effort. We propose an auto-labeling pipeline that generates labels for all the acquired frames based on the depth measurements. We provide a novel real-world glass object dataset that was collected on the Neuro-Inspired COLlaborator (NICOL), a humanoid robot platform. The data set consists of 7850 images recorded from five different cameras. We show that our trained baseline model outperforms state-of-the-art open-vocabulary approaches. In addition, we deploy our baseline model in an embodied agent approach to the NICOL platform, on which it achieves a success rate of 81% in a human-robot bartending scenario.
On Representation of 3D Rotation in the Context of Deep Learning
Oct 15, 2024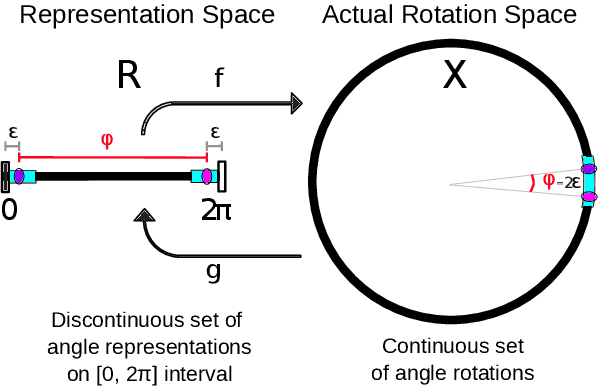
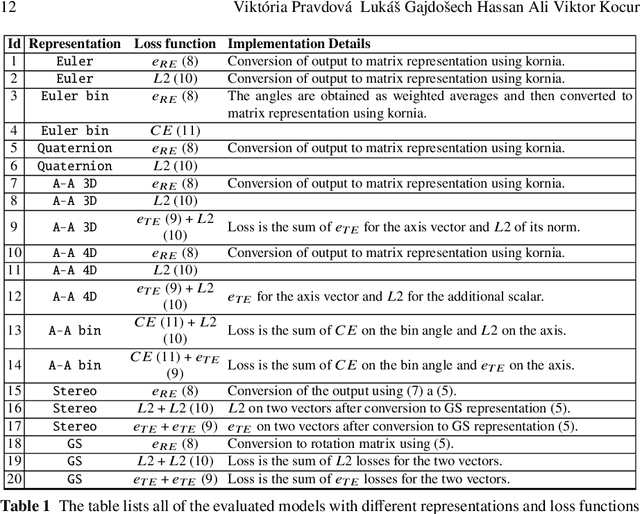
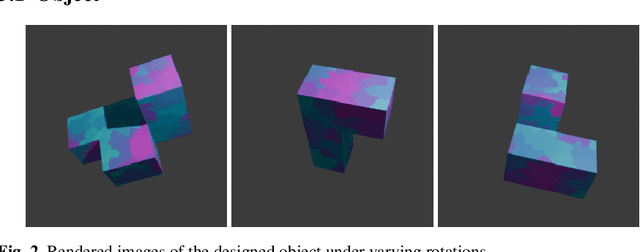
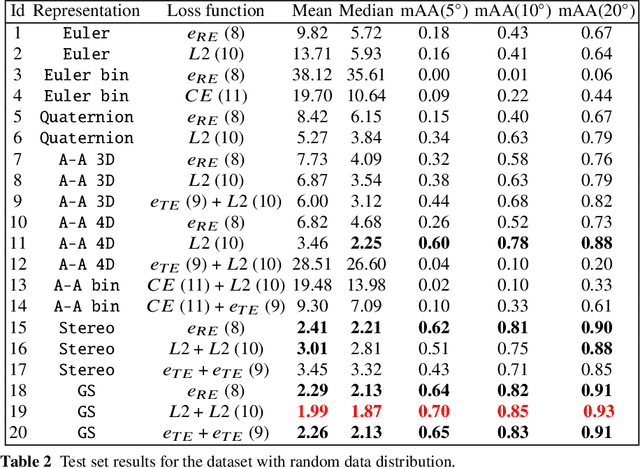
This paper investigates various methods of representing 3D rotations and their impact on the learning process of deep neural networks. We evaluated the performance of ResNet18 networks for 3D rotation estimation using several rotation representations and loss functions on both synthetic and real data. The real datasets contained 3D scans of industrial bins, while the synthetic datasets included views of a simple asymmetric object rendered under different rotations. On synthetic data, we also assessed the effects of different rotation distributions within the training and test sets, as well as the impact of the object's texture. In line with previous research, we found that networks using the continuous 5D and 6D representations performed better than the discontinuous ones.
Enhancement of 3D Camera Synthetic Training Data with Noise Models
Feb 26, 2024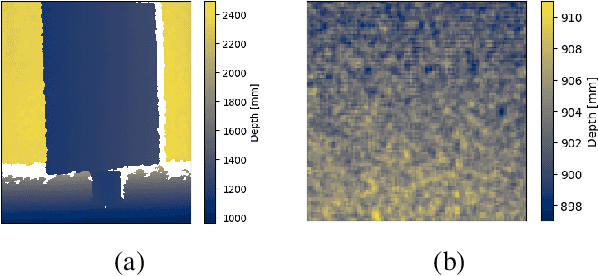
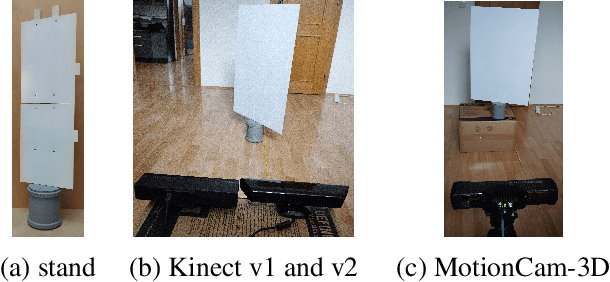
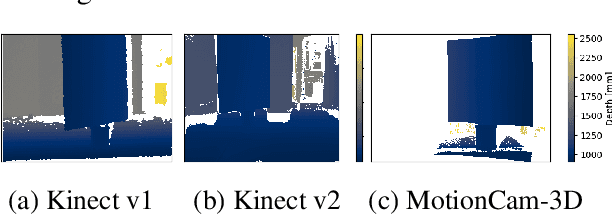
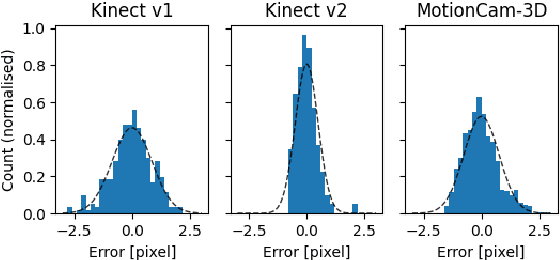
The goal of this paper is to assess the impact of noise in 3D camera-captured data by modeling the noise of the imaging process and applying it on synthetic training data. We compiled a dataset of specifically constructed scenes to obtain a noise model. We specifically model lateral noise, affecting the position of captured points in the image plane, and axial noise, affecting the position along the axis perpendicular to the image plane. The estimated models can be used to emulate noise in synthetic training data. The added benefit of adding artificial noise is evaluated in an experiment with rendered data for object segmentation. We train a series of neural networks with varying levels of noise in the data and measure their ability to generalize on real data. The results show that using too little or too much noise can hurt the networks' performance indicating that obtaining a model of noise from real scanners is beneficial for synthetic data generation.
* Published in 2024 Proceedings of the 27th Computer Vision Winter Workshop (CVWW). Accepted: 19.1.2024. Published: 16.2.2024. This work was funded by the Horizon-Widera-2021 European Twinning project TERAIS G.A. n. 101079338. Code: https://doi.org/10.5281/zenodo.10581562 Data: https://doi.org/10.5281/zenodo.10581278
Supersampling of Data from Structured-light Scanner with Deep Learning
Nov 13, 2023



This paper focuses on increasing the resolution of depth maps obtained from 3D cameras using structured light technology. Two deep learning models FDSR and DKN are modified to work with high-resolution data, and data pre-processing techniques are implemented for stable training. The models are trained on our custom dataset of 1200 3D scans. The resulting high-resolution depth maps are evaluated using qualitative and quantitative metrics. The approach for depth map upsampling offers benefits such as reducing the processing time of a pipeline by first downsampling a high-resolution depth map, performing various processing steps at the lower resolution and upsampling the resulting depth map or increasing the resolution of a point cloud captured in lower resolution by a cheaper device. The experiments demonstrate that the FDSR model excels in terms of faster processing time, making it a suitable choice for applications where speed is crucial. On the other hand, the DKN model provides results with higher precision, making it more suitable for applications that prioritize accuracy.
Processing and Segmentation of Human Teeth from 2D Images using Weakly Supervised Learning
Nov 13, 2023



Teeth segmentation is an essential task in dental image analysis for accurate diagnosis and treatment planning. While supervised deep learning methods can be utilized for teeth segmentation, they often require extensive manual annotation of segmentation masks, which is time-consuming and costly. In this research, we propose a weakly supervised approach for teeth segmentation that reduces the need for manual annotation. Our method utilizes the output heatmaps and intermediate feature maps from a keypoint detection network to guide the segmentation process. We introduce the TriDental dataset, consisting of 3000 oral cavity images annotated with teeth keypoints, to train a teeth keypoint detection network. We combine feature maps from different layers of the keypoint detection network, enabling accurate teeth segmentation without explicit segmentation annotations. The detected keypoints are also used for further refinement of the segmentation masks. Experimental results on the TriDental dataset demonstrate the superiority of our approach in terms of accuracy and robustness compared to state-of-the-art segmentation methods. Our method offers a cost-effective and efficient solution for teeth segmentation in real-world dental applications, eliminating the need for extensive manual annotation efforts.
Novel Synthetic Data Tool for Data-Driven Cardboard Box Localization
May 09, 2023Application of neural networks in industrial settings, such as automated factories with bin-picking solutions requires costly production of large labeled data-sets. This paper presents an automatic data generation tool with a procedural model of a cardboard box. We briefly demonstrate the capabilities of the system, its various parameters and empirically prove the usefulness of the generated synthetic data by training a simple neural network. We make sample synthetic data generated by the tool publicly available.