 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Representation of 3D Rotation in the Context of Deep Learning
Paper and Code
Oct 15, 2024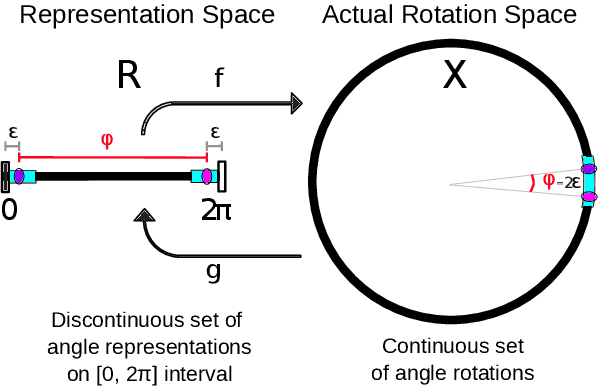
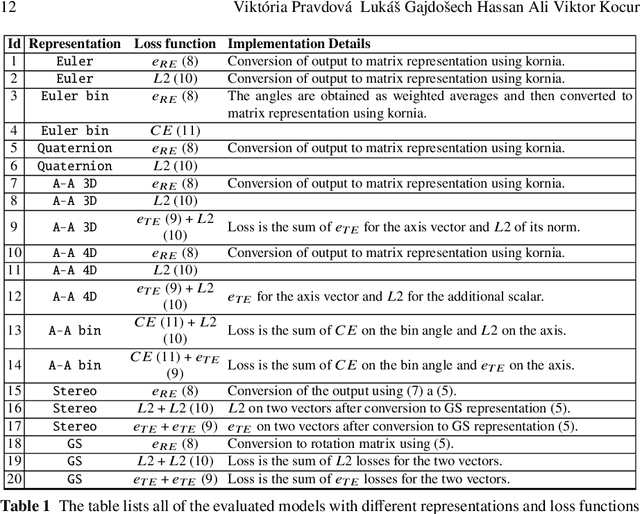
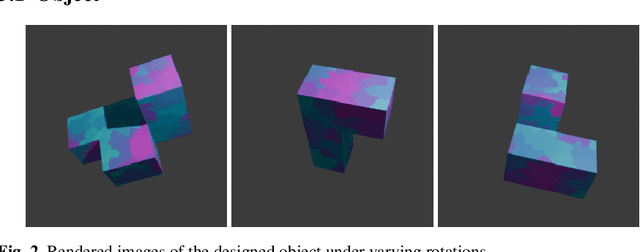
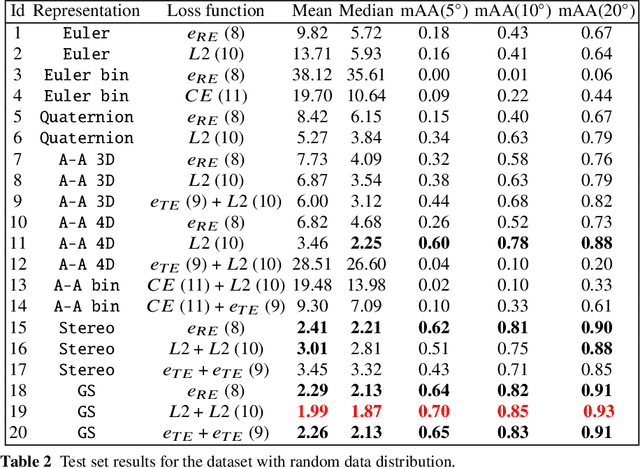
This paper investigates various methods of representing 3D rotations and their impact on the learning process of deep neural networks. We evaluated the performance of ResNet18 networks for 3D rotation estimation using several rotation representations and loss functions on both synthetic and real data. The real datasets contained 3D scans of industrial bins, while the synthetic datasets included views of a simple asymmetric object rendered under different rotations. On synthetic data, we also assessed the effects of different rotation distributions within the training and test sets, as well as the impact of the object's texture. In line with previous research, we found that networks using the continuous 5D and 6D representations performed better than the discontinuous ones.