 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEditable Stain Transformation Of Histological Images Using Unpaired GANs
Dec 06, 2023



Double staining in histopathology, particularly for metaplastic breast cancer, typically employs H&E and P63 dyes. However, P63's tissue damage and high cost necessitate alternative methods. This study introduces xAI-CycleGAN, an advanced architecture combining Mask CycleGAN with explainability features and structure-preserving capabilities for transforming H&E stained breast tissue images into P63-like images. The architecture allows for output editing, enhancing resemblance to actual images and enabling further model refinement. We showcase xAI-CycleGAN's efficacy in maintaining structural integrity and generating high-quality images. Additionally, a histopathologist survey indicates the generated images' realism is often comparable to actual images, validating our model's high-quality output.
xAI-CycleGAN, a Cycle-Consistent Generative Assistive Network
Jun 27, 2023In the domain of unsupervised image-to-image transformation using generative transformative models, CycleGAN has become the architecture of choice. One of the primary downsides of this architecture is its relatively slow rate of convergence. In this work, we use discriminator-driven explainability to speed up the convergence rate of the generative model by using saliency maps from the discriminator that mask the gradients of the generator during backpropagation, based on the work of Nagisetty et al., and also introducing the saliency map on input, added onto a Gaussian noise mask, by using an interpretable latent variable based on Wang M.'s Mask CycleGAN. This allows for an explainability fusion in both directions, and utilizing the noise-added saliency map on input as evidence-based counterfactual filtering. This new architecture has much higher rate of convergence than a baseline CycleGAN architecture while preserving the image quality.
Towards Deep Learning-based 6D Bin Pose Estimation in 3D Scans
Dec 17, 2021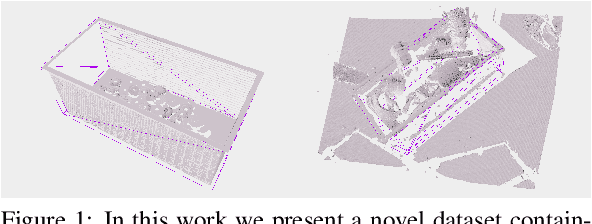

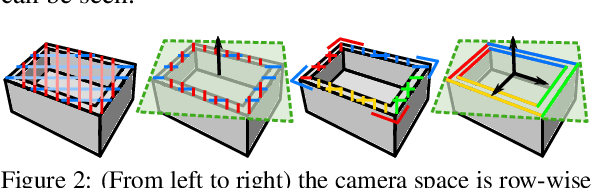
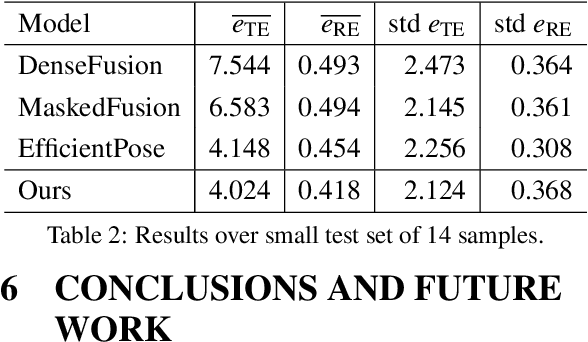
An automated robotic system needs to be as robust as possible and fail-safe in general while having relatively high precision and repeatability. Although deep learning-based methods are becoming research standard on how to approach 3D scan and image processing tasks, the industry standard for processing this data is still analytically-based. Our paper claims that analytical methods are less robust and harder for testing, updating, and maintaining. This paper focuses on a specific task of 6D pose estimation of a bin in 3D scans. Therefore, we present a high-quality dataset composed of synthetic data and real scans captured by a structured-light scanner with precise annotations. Additionally, we propose two different methods for 6D bin pose estimation, an analytical method as the industrial standard and a baseline data-driven method. Both approaches are cross-evaluated, and our experiments show that augmenting the training on real scans with synthetic data improves our proposed data-driven neural model. This position paper is preliminary, as proposed methods are trained and evaluated on a relatively small initial dataset which we plan to extend in the future.