 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamics-Aligned Shared Hypernetworks for Zero-Shot Actuator Inversion
Feb 06, 2026Zero-shot generalization in contextual reinforcement learning remains a core challenge, particularly when the context is latent and must be inferred from data. A canonical failure mode is actuator inversion, where identical actions produce opposite physical effects under a latent binary context. We propose DMA*-SH, a framework where a single hypernetwork, trained solely via dynamics prediction, generates a small set of adapter weights shared across the dynamics model, policy, and action-value function. This shared modulation imparts an inductive bias matched to actuator inversion, while input/output normalization and random input masking stabilize context inference, promoting directionally concentrated representations. We provide theoretical support via an expressivity separation result for hypernetwork modulation, and a variance decomposition with policy-gradient variance bounds that formalize how within-mode compression improves learning under actuator inversion. For evaluation, we introduce the Actuator Inversion Benchmark (AIB), a suite of environments designed to isolate discontinuous context-to-dynamics interactions. On AIB's held-out actuator-inversion tasks, DMA*-SH achieves zero-shot generalization, outperforming domain randomization by 111.8% and surpassing a standard context-aware baseline by 16.1%.
Scilab-RL: A software framework for efficient reinforcement learning and cognitive modeling research
Jan 25, 2024One problem with researching cognitive modeling and reinforcement learning (RL) is that researchers spend too much time on setting up an appropriate computational framework for their experiments. Many open source implementations of current RL algorithms exist, but there is a lack of a modular suite of tools combining different robotic simulators and platforms, data visualization, hyperparameter optimization, and baseline experiments. To address this problem, we present Scilab-RL, a software framework for efficient research in cognitive modeling and reinforcement learning for robotic agents. The framework focuses on goal-conditioned reinforcement learning using Stable Baselines 3 and the OpenAI gym interface. It enables native possibilities for experiment visualizations and hyperparameter optimization. We describe how these features enable researchers to conduct experiments with minimal time effort, thus maximizing research output.
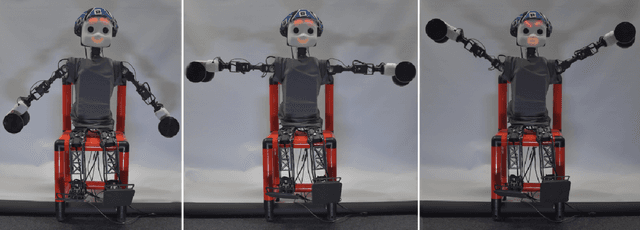
NICOL: A Neuro-inspired Collaborative Semi-humanoid Robot that Bridges Social Interaction and Reliable Manipulation
May 15, 2023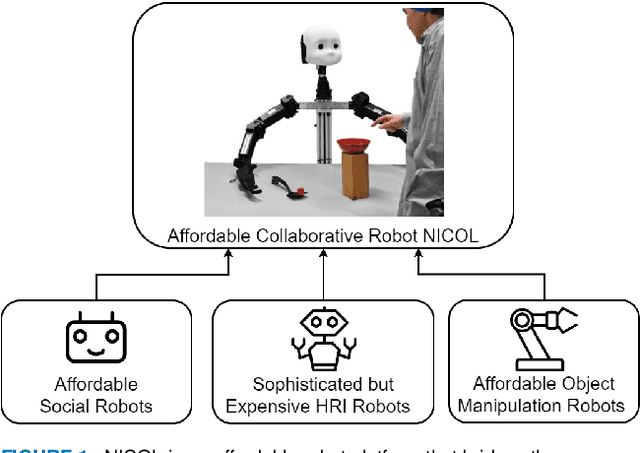
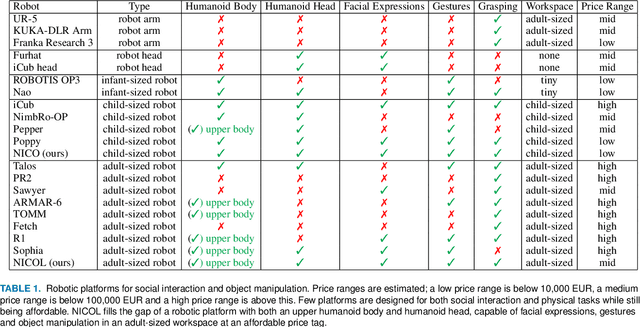

Robotic platforms that can efficiently collaborate with humans in physical tasks constitute a major goal in robotics. However, many existing robotic platforms are either designed for social interaction or industrial object manipulation tasks. The design of collaborative robots seldom emphasizes both their social interaction and physical collaboration abilities. To bridge this gap, we present the novel semi-humanoid NICOL, the Neuro-Inspired COLlaborator. NICOL is a large, newly designed, scaled-up version of its well-evaluated predecessor, the Neuro-Inspired COmpanion (NICO). While we adopt NICO's head and facial expression display, we extend its manipulation abilities in terms of precision, object size and workspace size. To introduce and evaluate NICOL, we first develop and extend different neural and hybrid neuro-genetic visuomotor approaches initially developed for the NICO to the larger NICOL and its more complex kinematics. Furthermore, we present a novel neuro-genetic approach that improves the grasp accuracy of the NICOL to over 99%, outperforming the state-of-the-art IK solvers KDL, TRACK-IK and BIO-IK. Furthermore, we introduce the social interaction capabilities of NICOL, including the auditory and visual capabilities, but also the face and emotion generation capabilities. Overall, this article presents for the first time the humanoid robot NICOL and, thereby, with the neuro-genetic approaches, contributes to the integration of social robotics and neural visuomotor learning for humanoid robots.
Language-Conditioned Reinforcement Learning to Solve Misunderstandings with Action Corrections
Nov 18, 2022
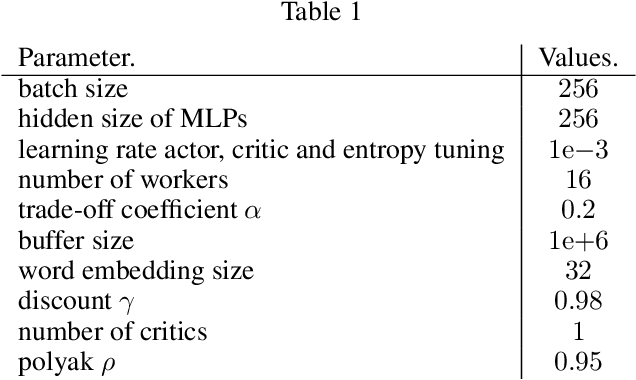
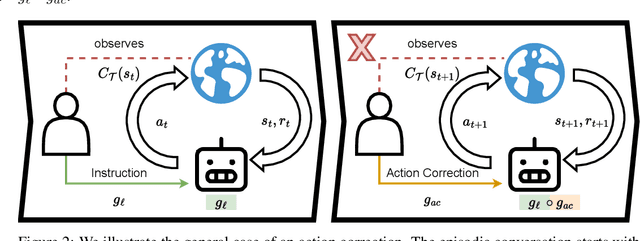
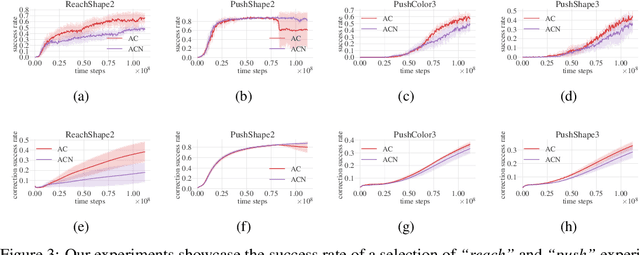
Human-to-human conversation is not just talking and listening. It is an incremental process where participants continually establish a common understanding to rule out misunderstandings. Current language understanding methods for intelligent robots do not consider this. There exist numerous approaches considering non-understandings, but they ignore the incremental process of resolving misunderstandings. In this article, we present a first formalization and experimental validation of incremental action-repair for robotic instruction-following based on reinforcement learning. To evaluate our approach, we propose a collection of benchmark environments for action correction in language-conditioned reinforcement learning, utilizing a synthetic instructor to generate language goals and their corresponding corrections. We show that a reinforcement learning agent can successfully learn to understand incremental corrections of misunderstood instructions.
Intelligent problem-solving as integrated hierarchical reinforcement learning
Aug 18, 2022According to cognitive psychology and related disciplines, the development of complex problem-solving behaviour in biological agents depends on hierarchical cognitive mechanisms. Hierarchical reinforcement learning is a promising computational approach that may eventually yield comparable problem-solving behaviour in artificial agents and robots. However, to date the problem-solving abilities of many human and non-human animals are clearly superior to those of artificial systems. Here, we propose steps to integrate biologically inspired hierarchical mechanisms to enable advanced problem-solving skills in artificial agents. Therefore, we first review the literature in cognitive psychology to highlight the importance of compositional abstraction and predictive processing. Then we relate the gained insights with contemporary hierarchical reinforcement learning methods. Interestingly, our results suggest that all identified cognitive mechanisms have been implemented individually in isolated computational architectures, raising the question of why there exists no single unifying architecture that integrates them. As our final contribution, we address this question by providing an integrative perspective on the computational challenges to develop such a unifying architecture. We expect our results to guide the development of more sophisticated cognitively inspired hierarchical machine learning architectures.
* Published as accepted article in Nature Machine Intelligence: https://www.nature.com/articles/s42256-021-00433-9. arXiv admin note: substantial text overlap with arXiv:2012.10147
Grounding Hindsight Instructions in Multi-Goal Reinforcement Learning for Robotics
Apr 08, 2022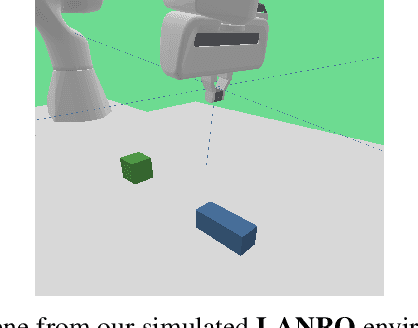

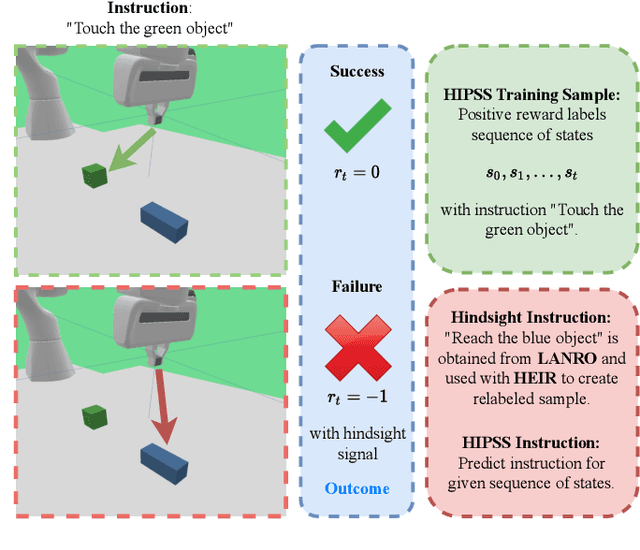
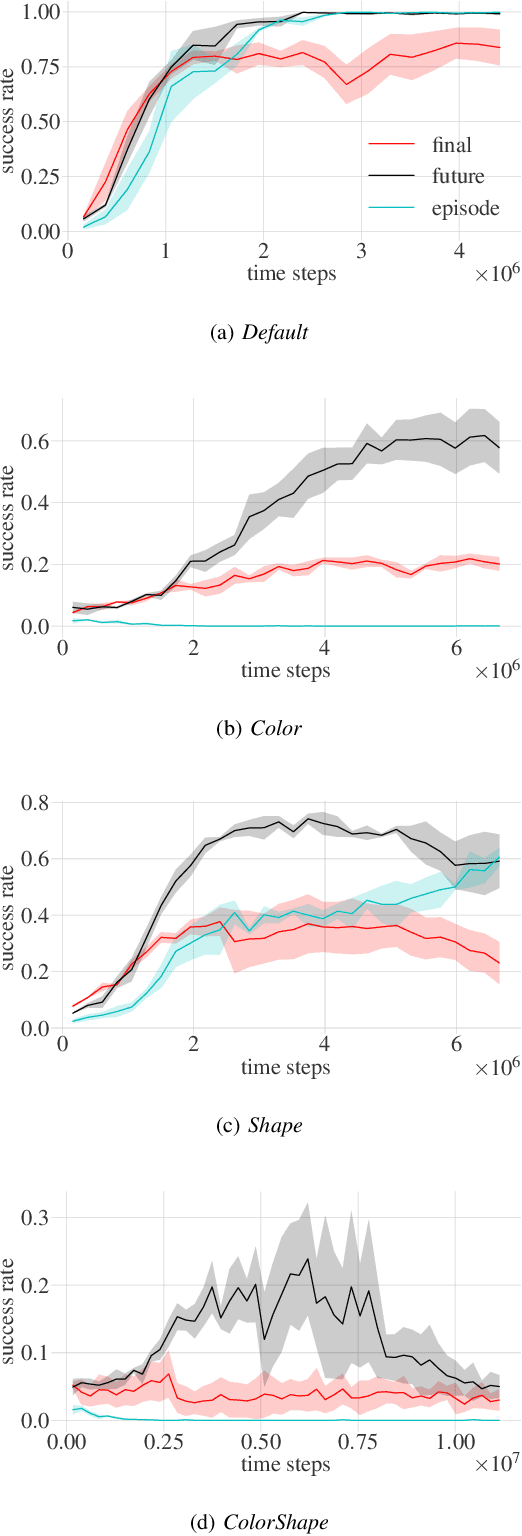
This paper focuses on robotic reinforcement learning with sparse rewards for natural language goal representations. An open problem is the sample-inefficiency that stems from the compositionality of natural language, and from the grounding of language in sensory data and actions. We address these issues with three contributions. We first present a mechanism for hindsight instruction replay utilizing expert feedback. Second, we propose a seq2seq model to generate linguistic hindsight instructions. Finally, we present a novel class of language-focused learning tasks. We show that hindsight instructions improve the learning performance, as expected. In addition, we also provide an unexpected result: We show that the learning performance of our agent can be improved by one third if, in a sense, the agent learns to talk to itself in a self-supervised manner. We achieve this by learning to generate linguistic instructions that would have been appropriate as a natural language goal for an originally unintended behavior. Our results indicate that the performance gain increases with the task-complexity.
Exercise with Social Robots: Companion or Coach?
Mar 24, 2021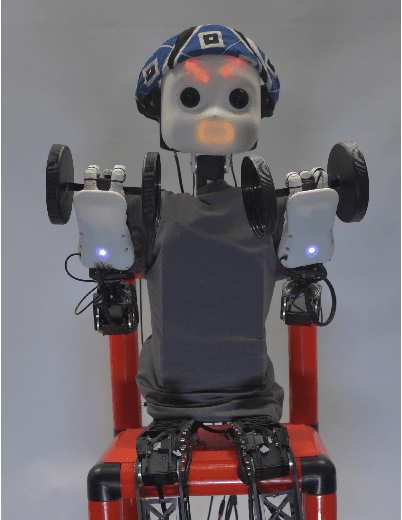
In this paper, we investigate the roles that social robots can take in physical exercise with human partners. In related work, robots or virtual intelligent agents take the role of a coach or instructor whereas in other approaches they are used as motivational aids. These are two "paradigms", so to speak, within the small but growing area of robots for social exercise. We designed an online questionnaire to test whether the preferred role in which people want to see robots would be the companion or the coach. The questionnaire asks people to imagine working out with a robot with the help of three utilized questionnaires: (1) CART-Q which is used for judging coach-athlete relationships, (2) the mind perception questionnaire and (3) the System Usability Scale (SUS). We present the methodology, some preliminary results as well as our intended future work on personal robots for coaching.
Intelligent behavior depends on the ecological niche: Scaling up AI to human-like intelligence in socio-cultural environments
Mar 11, 2021This paper outlines a perspective on the future of AI, discussing directions for machines models of human-like intelligence. We explain how developmental and evolutionary theories of human cognition should further inform artificial intelligence. We emphasize the role of ecological niches in sculpting intelligent behavior, and in particular that human intelligence was fundamentally shaped to adapt to a constantly changing socio-cultural environment. We argue that a major limit of current work in AI is that it is missing this perspective, both theoretically and experimentally. Finally, we discuss the promising approach of developmental artificial intelligence, modeling infant development through multi-scale interaction between intrinsically motivated learning, embodiment and a fastly changing socio-cultural environment. This paper takes the form of an interview of Pierre-Yves Oudeyer by Mandred Eppe, organized within the context of a KI - K{\"{u}}nstliche Intelligenz special issue in developmental robotics.
* Keywords: developmental AI, general artificial intelligence, human-like AI, embodiment, cultural evolution, language, socio-cultural skills
Hierarchical principles of embodied reinforcement learning: A review
Dec 18, 2020
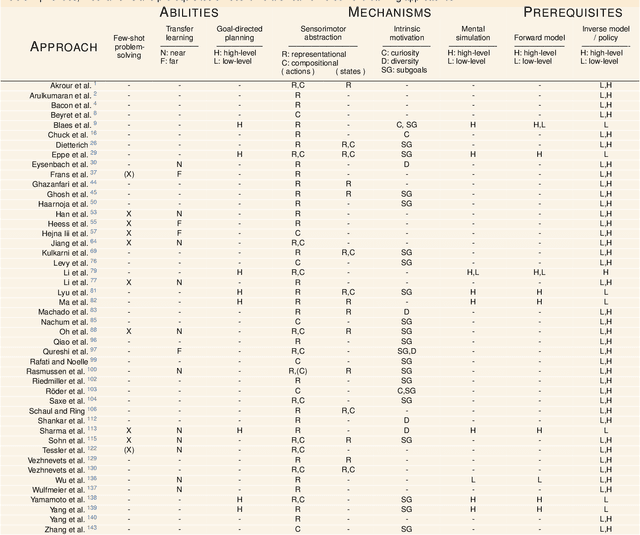
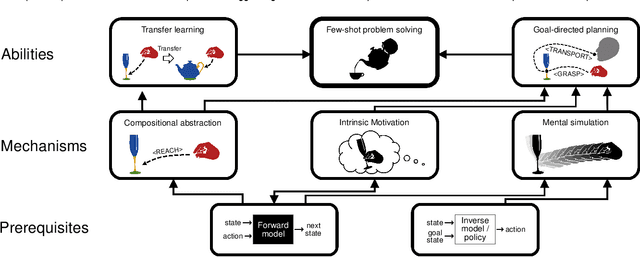
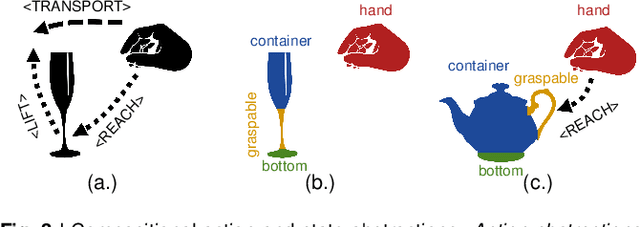
Cognitive Psychology and related disciplines have identified several critical mechanisms that enable intelligent biological agents to learn to solve complex problems. There exists pressing evidence that the cognitive mechanisms that enable problem-solving skills in these species build on hierarchical mental representations. Among the most promising computational approaches to provide comparable learning-based problem-solving abilities for artificial agents and robots is hierarchical reinforcement learning. However, so far the existing computational approaches have not been able to equip artificial agents with problem-solving abilities that are comparable to intelligent animals, including human and non-human primates, crows, or octopuses. Here, we first survey the literature in Cognitive Psychology, and related disciplines, and find that many important mental mechanisms involve compositional abstraction, curiosity, and forward models. We then relate these insights with contemporary hierarchical reinforcement learning methods, and identify the key machine intelligence approaches that realise these mechanisms. As our main result, we show that all important cognitive mechanisms have been implemented independently in isolated computational architectures, and there is simply a lack of approaches that integrate them appropriately. We expect our results to guide the development of more sophisticated cognitively inspired hierarchical methods, so that future artificial agents achieve a problem-solving performance on the level of intelligent animals.
Sensorimotor representation learning for an "active self" in robots: A model survey
Nov 25, 2020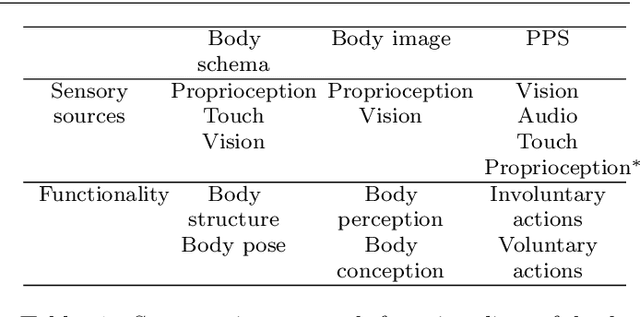

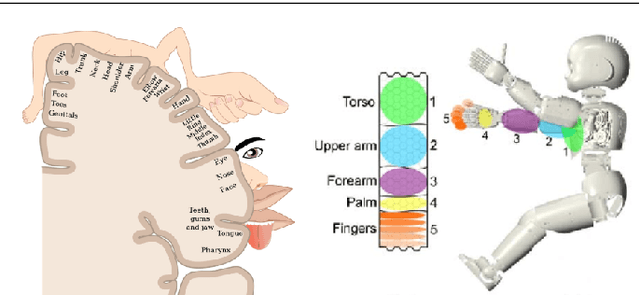
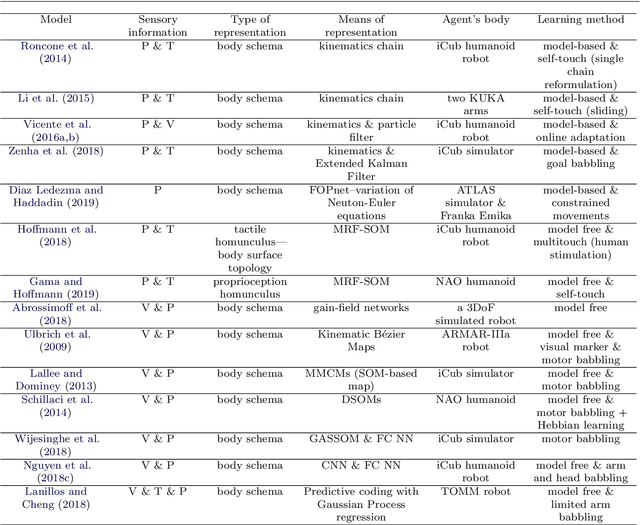
Safe human-robot interactions require robots to be able to learn how to behave appropriately in \sout{humans' world} \rev{spaces populated by people} and thus to cope with the challenges posed by our dynamic and unstructured environment, rather than being provided a rigid set of rules for operations. In humans, these capabilities are thought to be related to our ability to perceive our body in space, sensing the location of our limbs during movement, being aware of other objects and agents, and controlling our body parts to interact with them intentionally. Toward the next generation of robots with bio-inspired capacities, in this paper, we first review the developmental processes of underlying mechanisms of these abilities: The sensory representations of body schema, peripersonal space, and the active self in humans. Second, we provide a survey of robotics models of these sensory representations and robotics models of the self; and we compare these models with the human counterparts. Finally, we analyse what is missing from these robotics models and propose a theoretical computational framework, which aims to allow the emergence of the sense of self in artificial agents by developing sensory representations through self-exploration.