 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExercise with Social Robots: Companion or Coach?
Mar 24, 2021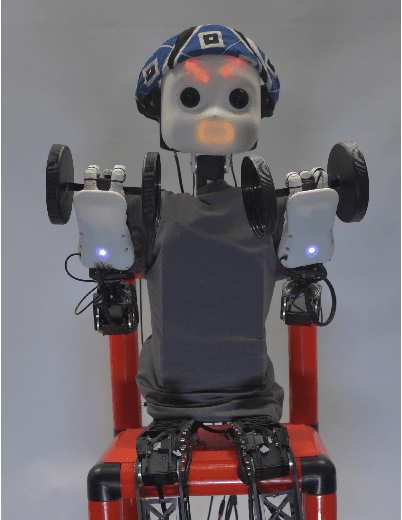
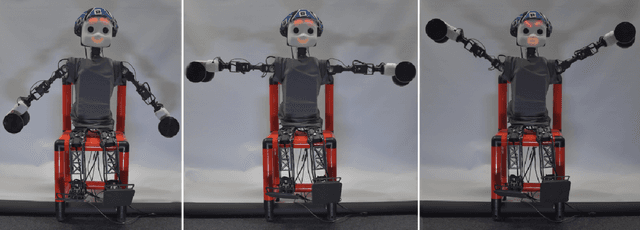
In this paper, we investigate the roles that social robots can take in physical exercise with human partners. In related work, robots or virtual intelligent agents take the role of a coach or instructor whereas in other approaches they are used as motivational aids. These are two "paradigms", so to speak, within the small but growing area of robots for social exercise. We designed an online questionnaire to test whether the preferred role in which people want to see robots would be the companion or the coach. The questionnaire asks people to imagine working out with a robot with the help of three utilized questionnaires: (1) CART-Q which is used for judging coach-athlete relationships, (2) the mind perception questionnaire and (3) the System Usability Scale (SUS). We present the methodology, some preliminary results as well as our intended future work on personal robots for coaching.
Disambiguating Affective Stimulus Associations for Robot Perception and Dialogue
Mar 05, 2021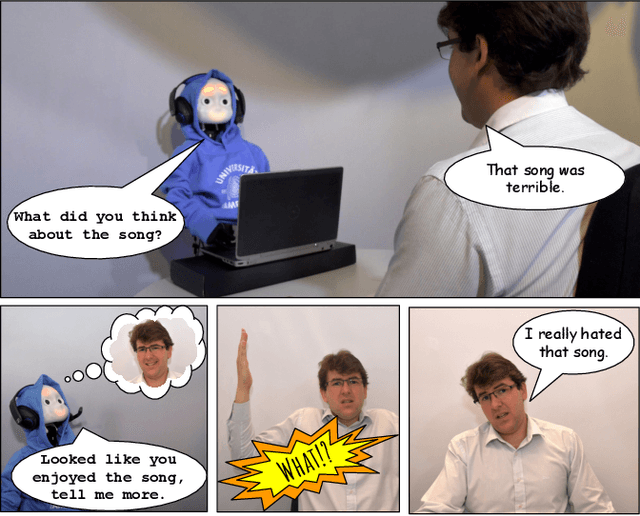

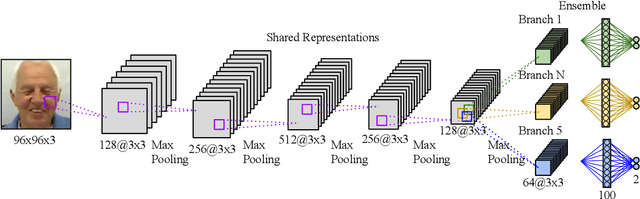
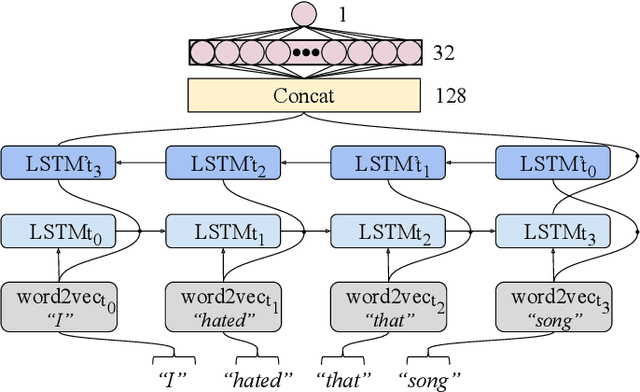
Effectively recognising and applying emotions to interactions is a highly desirable trait for social robots. Implicitly understanding how subjects experience different kinds of actions and objects in the world is crucial for natural HRI interactions, with the possibility to perform positive actions and avoid negative actions. In this paper, we utilize the NICO robot's appearance and capabilities to give the NICO the ability to model a coherent affective association between a perceived auditory stimulus and a temporally asynchronous emotion expression. This is done by combining evaluations of emotional valence from vision and language. NICO uses this information to make decisions about when to extend conversations in order to accrue more affective information if the representation of the association is not coherent. Our primary contribution is providing a NICO robot with the ability to learn the affective associations between a perceived auditory stimulus and an emotional expression. NICO is able to do this for both individual subjects and specific stimuli, with the aid of an emotion-driven dialogue system that rectifies emotional expression incoherences. The robot is then able to use this information to determine a subject's enjoyment of perceived auditory stimuli in a real HRI scenario.
An Affective Robot Companion for Assisting the Elderly in a Cognitive Game Scenario
Jul 12, 2018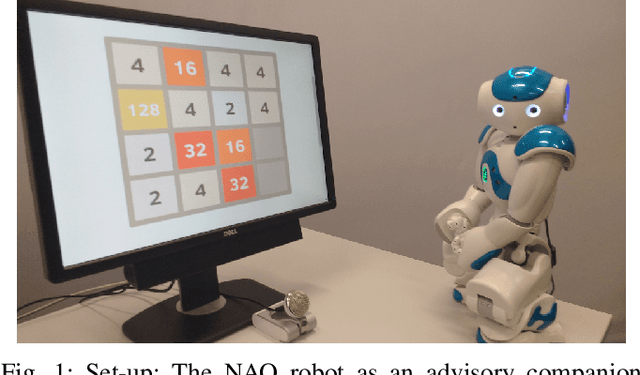
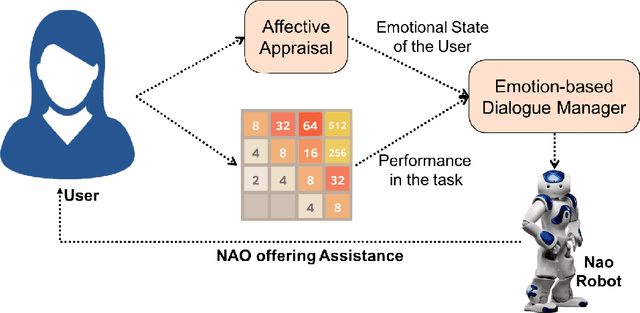
Being able to recognize emotions in human users is considered a highly desirable trait in Human-Robot Interaction (HRI) scenarios. However, most contemporary approaches rarely attempt to apply recognized emotional features in an active manner to modulate robot decision-making and dialogue for the benefit of the user. In this position paper, we propose a method of incorporating recognized emotions into a Reinforcement Learning (RL) based dialogue management module that adapts its dialogue responses in order to attempt to make cognitive training tasks, like the 2048 Puzzle Game, more enjoyable for the users.