 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinual Learning Should Move Beyond Incremental Classification
Feb 17, 2025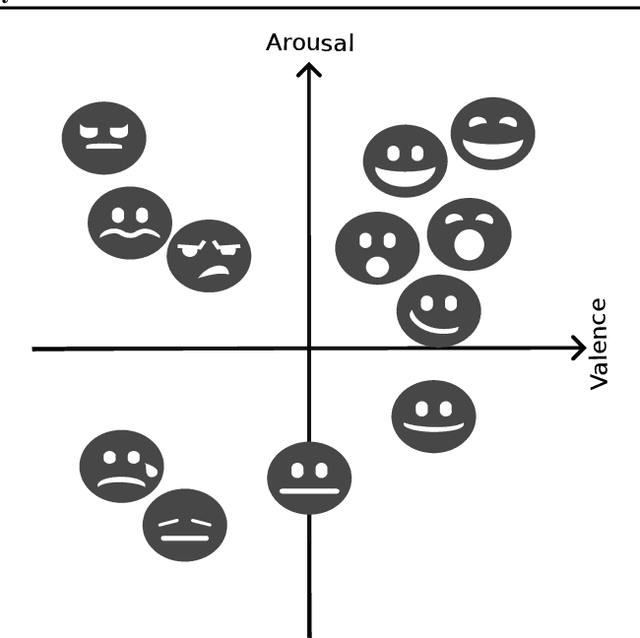
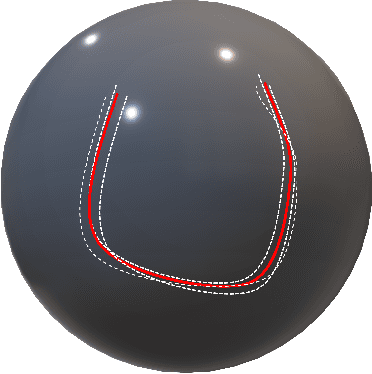
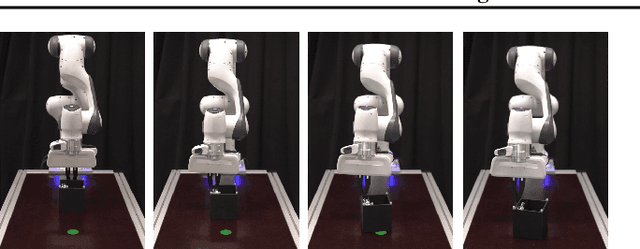

Continual learning (CL) is the sub-field of machine learning concerned with accumulating knowledge in dynamic environments. So far, CL research has mainly focused on incremental classification tasks, where models learn to classify new categories while retaining knowledge of previously learned ones. Here, we argue that maintaining such a focus limits both theoretical development and practical applicability of CL methods. Through a detailed analysis of concrete examples - including multi-target classification, robotics with constrained output spaces, learning in continuous task domains, and higher-level concept memorization - we demonstrate how current CL approaches often fail when applied beyond standard classification. We identify three fundamental challenges: (C1) the nature of continuity in learning problems, (C2) the choice of appropriate spaces and metrics for measuring similarity, and (C3) the role of learning objectives beyond classification. For each challenge, we provide specific recommendations to help move the field forward, including formalizing temporal dynamics through distribution processes, developing principled approaches for continuous task spaces, and incorporating density estimation and generative objectives. In so doing, this position paper aims to broaden the scope of CL research while strengthening its theoretical foundations, making it more applicable to real-world problems.
Federated Learning of Socially Appropriate Agent Behaviours in Simulated Home Environments
Mar 12, 2024



As social robots become increasingly integrated into daily life, ensuring their behaviours align with social norms is crucial. For their widespread open-world application, it is important to explore Federated Learning (FL) settings where individual robots can learn about their unique environments while also learning from each others' experiences. In this paper, we present a novel FL benchmark that evaluates different strategies, using multi-label regression objectives, where each client individually learns to predict the social appropriateness of different robot actions while also sharing their learning with others. Furthermore, splitting the training data by different contexts such that each client incrementally learns across contexts, we present a novel Federated Continual Learning (FCL) benchmark that adapts FL-based methods to use state-of-the-art Continual Learning (CL) methods to continually learn socially appropriate agent behaviours under different contextual settings. Federated Averaging (FedAvg) of weights emerges as a robust FL strategy while rehearsal-based FCL enables incrementally learning the social appropriateness of robot actions, across contextual splits.
Continual Facial Expression Recognition: A Benchmark
May 10, 2023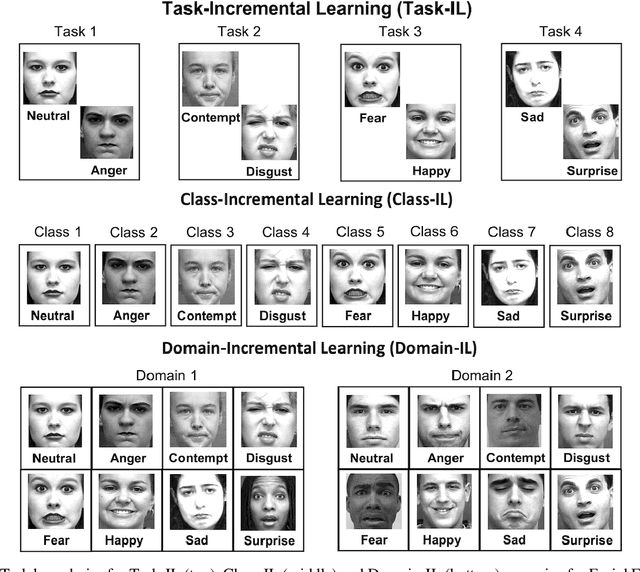
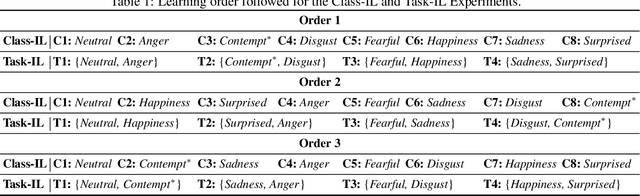
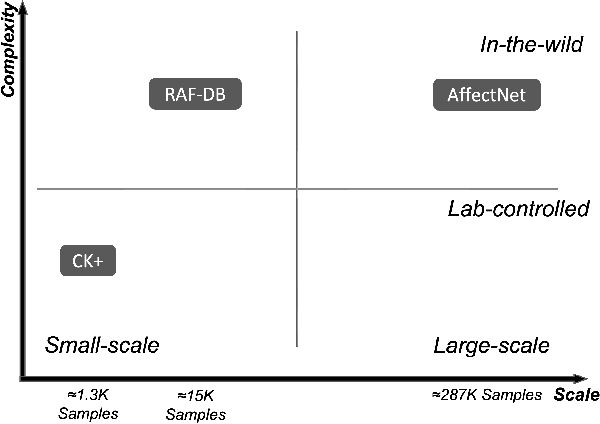
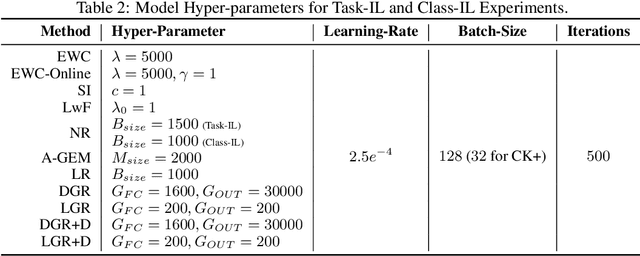
Understanding human affective behaviour, especially in the dynamics of real-world settings, requires Facial Expression Recognition (FER) models to continuously adapt to individual differences in user expression, contextual attributions, and the environment. Current (deep) Machine Learning (ML)-based FER approaches pre-trained in isolation on benchmark datasets fail to capture the nuances of real-world interactions where data is available only incrementally, acquired by the agent or robot during interactions. New learning comes at the cost of previous knowledge, resulting in catastrophic forgetting. Lifelong or Continual Learning (CL), on the other hand, enables adaptability in agents by being sensitive to changing data distributions, integrating new information without interfering with previously learnt knowledge. Positing CL as an effective learning paradigm for FER, this work presents the Continual Facial Expression Recognition (ConFER) benchmark that evaluates popular CL techniques on FER tasks. It presents a comparative analysis of several CL-based approaches on popular FER datasets such as CK+, RAF-DB, and AffectNet and present strategies for a successful implementation of ConFER for Affective Computing (AC) research. CL techniques, under different learning settings, are shown to achieve state-of-the-art (SOTA) performance across several datasets, thus motivating a discussion on the benefits of applying CL principles towards human behaviour understanding, particularly from facial expressions, as well the challenges entailed.
Affective Computing for Human-Robot Interaction Research: Four Critical Lessons for the Hitchhiker
Mar 31, 2023



Social Robotics and Human-Robot Interaction (HRI) research relies on different Affective Computing (AC) solutions for sensing, perceiving and understanding human affective behaviour during interactions. This may include utilising off-the-shelf affect perception models that are pre-trained on popular affect recognition benchmarks and directly applied to situated interactions. However, the conditions in situated human-robot interactions differ significantly from the training data and settings of these models. Thus, there is a need to deepen our understanding of how AC solutions can be best leveraged, customised and applied for situated HRI. This paper, while critiquing the existing practices, presents four critical lessons to be noted by the hitchhiker when applying AC for HRI research. These lessons conclude that: (i) The six basic emotions categories are irrelevant in situated interactions, (ii) Affect recognition accuracy (%) improvements are unimportant, (iii) Affect recognition does not generalise across contexts, and (iv) Affect recognition alone is insufficient for adaptation and personalisation. By describing the background and the context for each lesson, and demonstrating how these lessons have been learnt, this paper aims to enable the hitchhiker to successfully and insightfully leverage AC solutions for advancing HRI research.
Participant Perceptions of a Robotic Coach Conducting Positive Psychology Exercises: A Systematic Analysis
Sep 08, 2022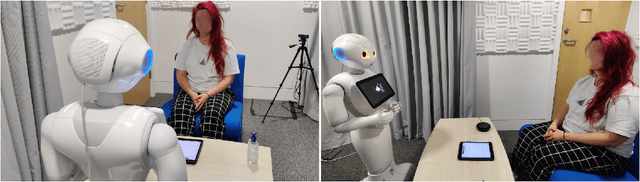
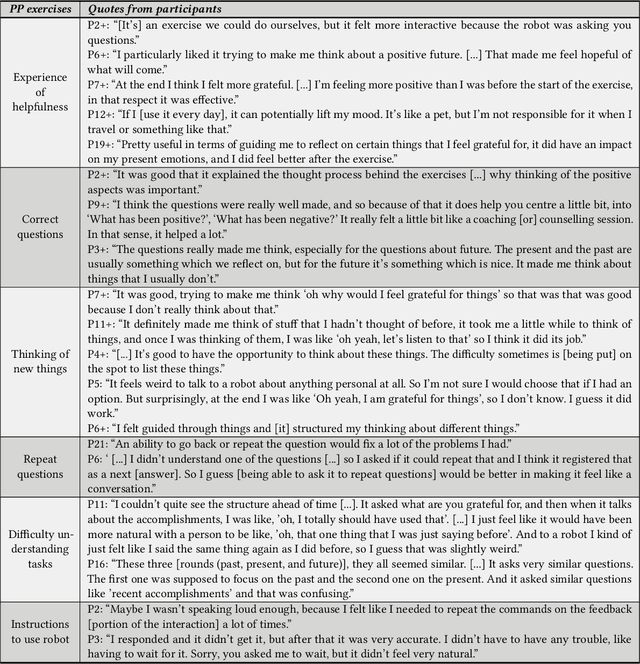
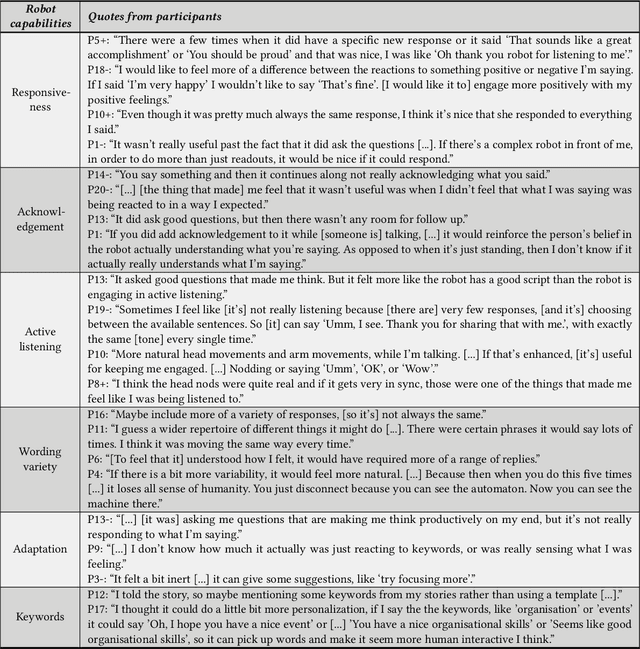
This paper provides a detailed overview of a case study of applying Continual Learning (CL) to a single-session Human-Robot Interaction (HRI) session (avg. 31 +- 10 minutes), where a robotic mental well-being coach conducted Positive Psychology (PP) exercises with (n = 20) participants. We present the results of a Thematic Analysis (TA) of data recorded from brief semi-structured interviews that were conducted with participants after the interaction sessions, as well as an analysis of statistical results demonstrating how participants' personalities may affect how they perceive the robot and its interactions.
Continual Learning for Affective Robotics: A Proof of Concept for Wellbeing
Jun 22, 2022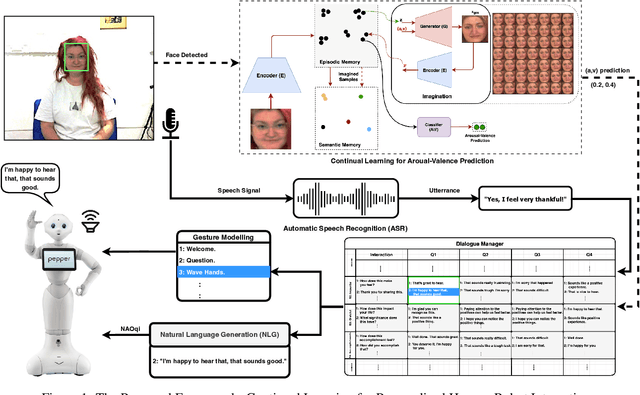
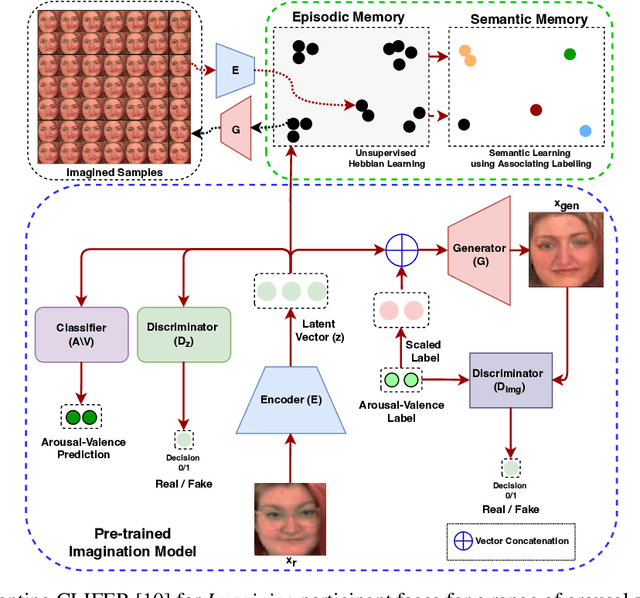
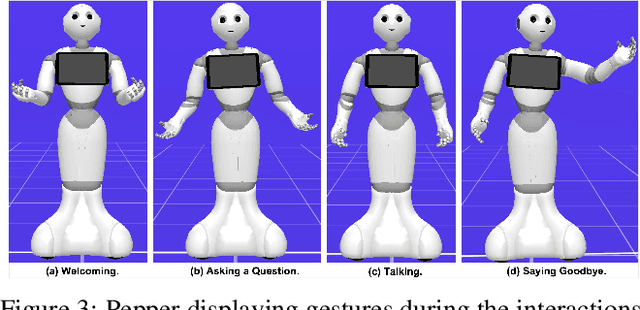
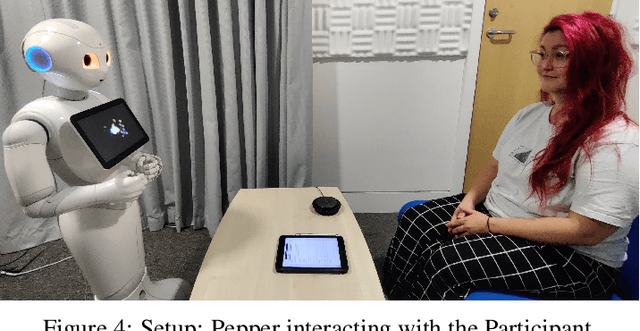
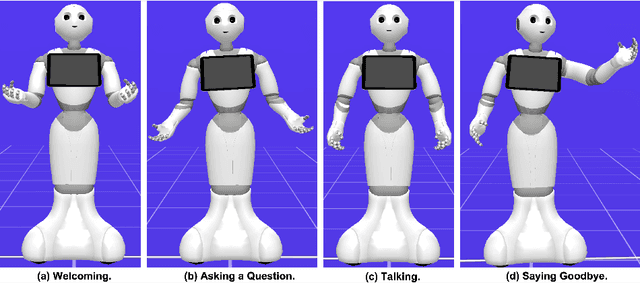
Sustaining real-world human-robot interactions requires robots to be sensitive to human behavioural idiosyncrasies and adapt their perception and behaviour models to cater to these individual preferences. For affective robots, this entails learning to adapt to individual affective behaviour to offer a personalised interaction experience to each individual. Continual Learning (CL) has been shown to enable real-time adaptation in agents, allowing them to learn with incrementally acquired data while preserving past knowledge. In this work, we present a novel framework for real-world application of CL for modelling personalised human-robot interactions using a CL-based affect perception mechanism. To evaluate the proposed framework, we undertake a proof-of-concept user study with 20 participants interacting with the Pepper robot using three variants of interaction behaviour: static and scripted, using affect-based adaptation without personalisation, and using affect-based adaptation with continual personalisation. Our results demonstrate a clear preference in the participants for CL-based continual personalisation with significant improvements observed in the robot's anthropomorphism, animacy and likeability ratings as well as the interactions being rated significantly higher for warmth and comfort as the robot is rated as significantly better at understanding how the participants feel.
Towards Fair Affective Robotics: Continual Learning for Mitigating Bias in Facial Expression and Action Unit Recognition
Mar 15, 2021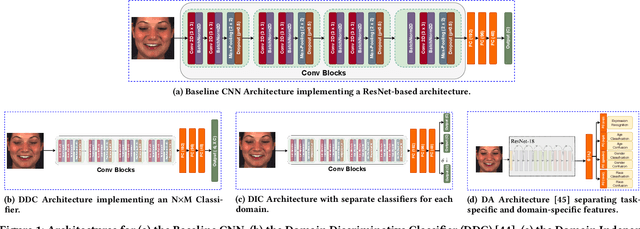
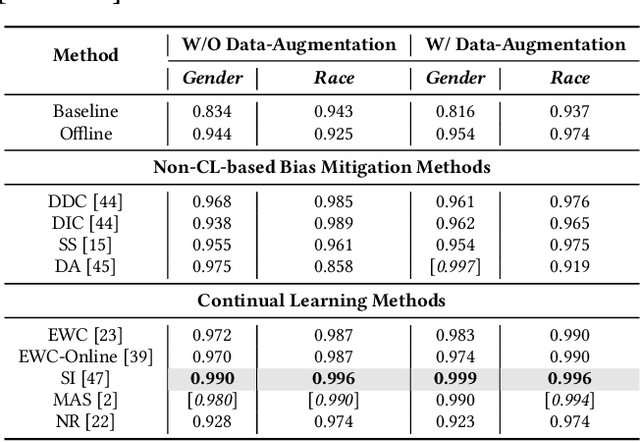
As affective robots become integral in human life, these agents must be able to fairly evaluate human affective expressions without discriminating against specific demographic groups. Identifying bias in Machine Learning (ML) systems as a critical problem, different approaches have been proposed to mitigate such biases in the models both at data and algorithmic levels. In this work, we propose Continual Learning (CL) as an effective strategy to enhance fairness in Facial Expression Recognition (FER) systems, guarding against biases arising from imbalances in data distributions. We compare different state-of-the-art bias mitigation approaches with CL-based strategies for fairness on expression recognition and Action Unit (AU) detection tasks using popular benchmarks for each; RAF-DB and BP4D. Our experiments show that CL-based methods, on average, outperform popular bias mitigation techniques, strengthening the need for further investigation into CL for the development of fairer FER algorithms.
Domain-Incremental Continual Learning for Mitigating Bias in Facial Expression and Action Unit Recognition
Mar 15, 2021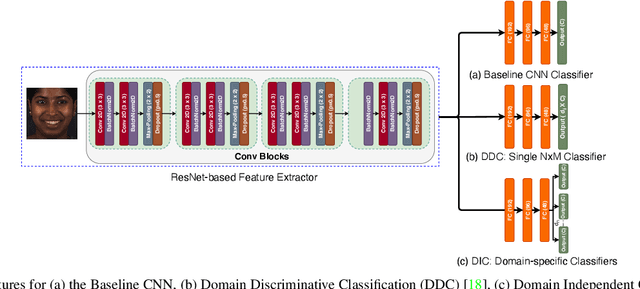

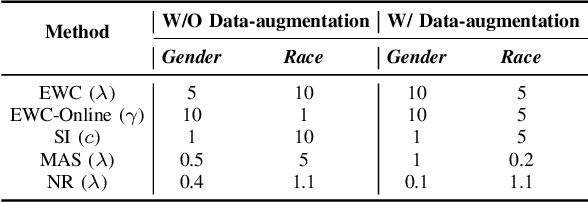
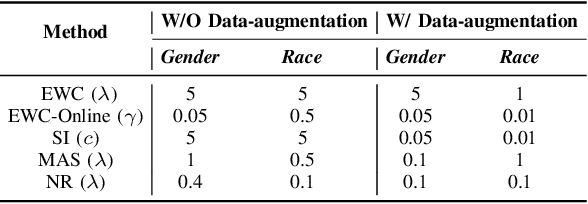
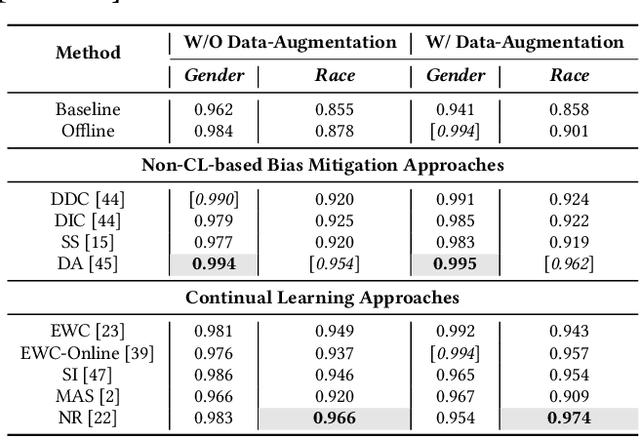
As Facial Expression Recognition (FER) systems become integrated into our daily lives, these systems need to prioritise making fair decisions instead of aiming at higher individual accuracy scores. Ranging from surveillance systems to diagnosing mental and emotional health conditions of individuals, these systems need to balance the accuracy vs fairness trade-off to make decisions that do not unjustly discriminate against specific under-represented demographic groups. Identifying bias as a critical problem in facial analysis systems, different methods have been proposed that aim to mitigate bias both at data and algorithmic levels. In this work, we propose the novel usage of Continual Learning (CL), in particular, using Domain-Incremental Learning (Domain-IL) settings, as a potent bias mitigation method to enhance the fairness of FER systems while guarding against biases arising from skewed data distributions. We compare different non-CL-based and CL-based methods for their classification accuracy and fairness scores on expression recognition and Action Unit (AU) detection tasks using two popular benchmarks, the RAF-DB and BP4D datasets, respectively. Our experimental results show that CL-based methods, on average, outperform other popular bias mitigation techniques on both accuracy and fairness metrics.
Spatio-Temporal Analysis of Facial Actions using Lifecycle-Aware Capsule Networks
Nov 17, 2020Most state-of-the-art approaches for Facial Action Unit (AU) detection rely upon evaluating facial expressions from static frames, encoding a snapshot of heightened facial activity. In real-world interactions, however, facial expressions are usually more subtle and evolve in a temporal manner requiring AU detection models to learn spatial as well as temporal information. In this paper, we focus on both spatial and spatio-temporal features encoding the temporal evolution of facial AU activation. For this purpose, we propose the Action Unit Lifecycle-Aware Capsule Network (AULA-Caps) that performs AU detection using both frame and sequence-level features. While at the frame-level the capsule layers of AULA-Caps learn spatial feature primitives to determine AU activations, at the sequence-level, it learns temporal dependencies between contiguous frames by focusing on relevant spatio-temporal segments in the sequence. The learnt feature capsules are routed together such that the model learns to selectively focus more on spatial or spatio-temporal information depending upon the AU lifecycle. The proposed model is evaluated on the commonly used BP4D and GFT benchmark datasets obtaining state-of-the-art results on both the datasets.
Affect-Driven Modelling of Robot Personality for Collaborative Human-Robot Interactions
Oct 14, 2020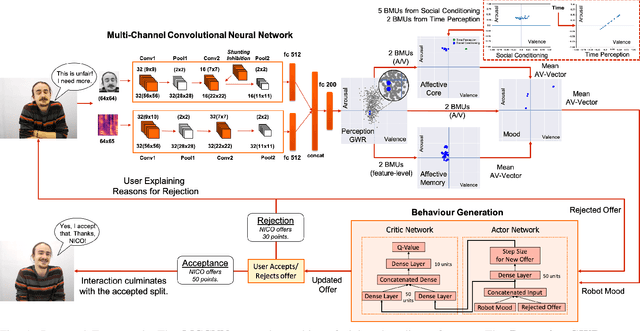
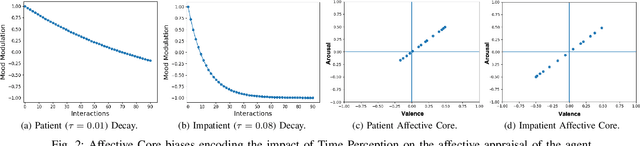
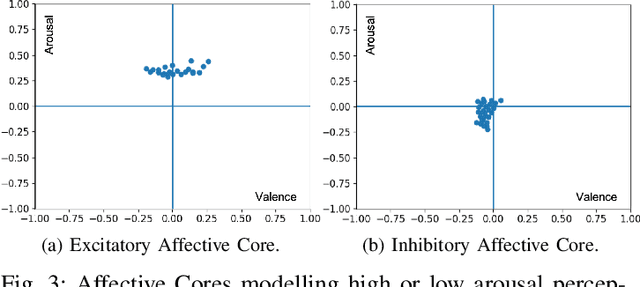
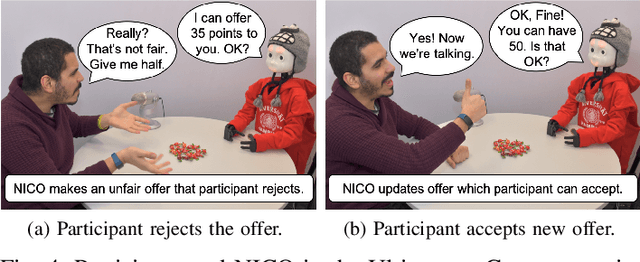
Collaborative interactions require social robots to adapt to the dynamics of human affective behaviour. Yet, current approaches for affective behaviour generation in robots focus on instantaneous perception to generate a one-to-one mapping between observed human expressions and static robot actions. In this paper, we propose a novel framework for personality-driven behaviour generation in social robots. The framework consists of (i) a hybrid neural model for evaluating facial expressions and speech, forming intrinsic affective representations in the robot, (ii) an Affective Core, that employs self-organising neural models to embed robot personality traits like patience and emotional actuation, and (iii) a Reinforcement Learning model that uses the robot's affective appraisal to learn interaction behaviour. For evaluation, we conduct a user study (n = 31) where the NICO robot acts as a proposer in the Ultimatum Game. The effect of robot personality on its negotiation strategy is witnessed by participants, who rank a patient robot with high emotional actuation higher on persistence, while an inert and impatient robot higher on its generosity and altruistic behaviour.