Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic self-representation improves manipulation skills and transfer learning
Paper and Code
Nov 13, 2020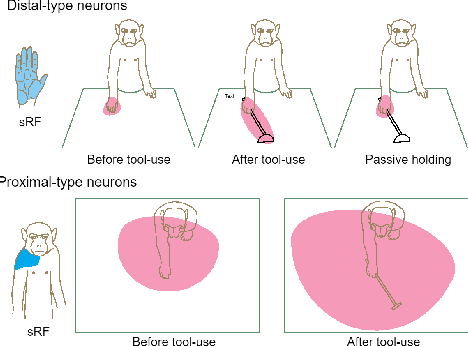
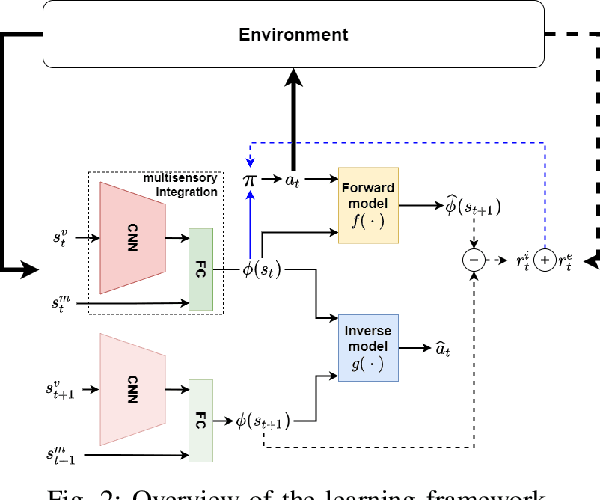
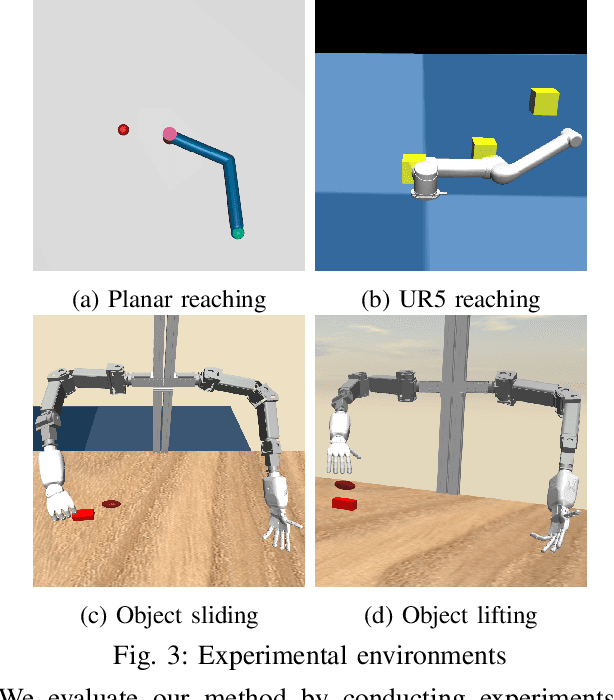
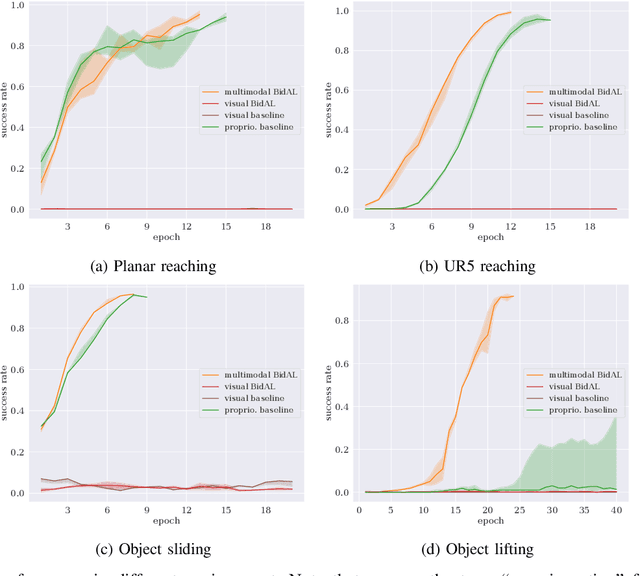
Cognitive science suggests that the self-representation is critical for learning and problem-solving. However, there is a lack of computational methods that relate this claim to cognitively plausible robots and reinforcement learning. In this paper, we bridge this gap by developing a model that learns bidirectional action-effect associations to encode the representations of body schema and the peripersonal space from multisensory information, which is named multimodal BidAL. Through three different robotic experiments, we demonstrate that this approach significantly stabilizes the learning-based problem-solving under noisy conditions and that it improves transfer learning of robotic manipulation skills.
* Submitted to IEEE Robotics and Automation Letters (RA-L) 2021 with
International Conference on Robotics and Automation Conference Option (ICRA)
2021
View paper on