 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Emotional Dilemma: Influence of a Human-like Robot on Trust and Cooperation
Jul 06, 2023Increasing anthropomorphic robot behavioral design could affect trust and cooperation positively. However, studies have shown contradicting results and suggest a task-dependent relationship between robots that display emotions and trust. Therefore, this study analyzes the effect of robots that display human-like emotions on trust, cooperation, and participants' emotions. In the between-group study, participants play the coin entrustment game with an emotional and a non-emotional robot. The results show that the robot that displays emotions induces more anxiety than the neutral robot. Accordingly, the participants trust the emotional robot less and are less likely to cooperate. Furthermore, the perceived intelligence of a robot increases trust, while a desire to outcompete the robot can reduce trust and cooperation. Thus, the design of robots expressing emotions should be task dependent to avoid adverse effects that reduce trust and cooperation.
Map-based Experience Replay: A Memory-Efficient Solution to Catastrophic Forgetting in Reinforcement Learning
May 03, 2023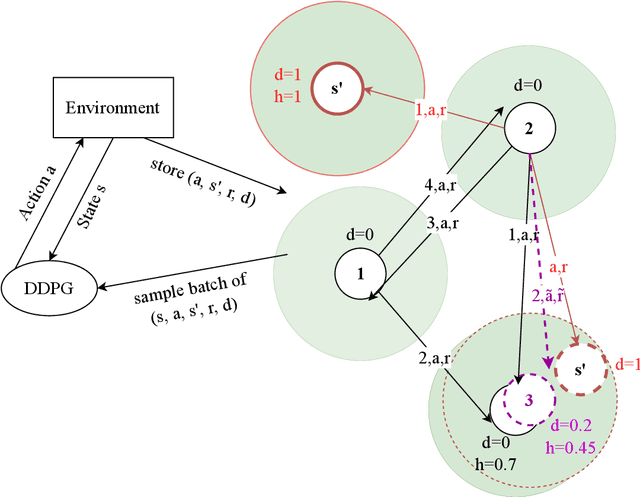
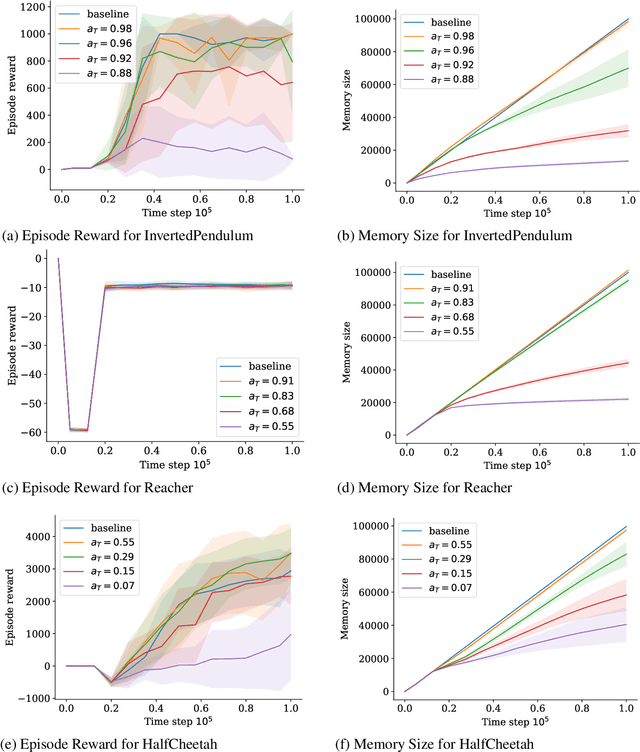
Deep Reinforcement Learning agents often suffer from catastrophic forgetting, forgetting previously found solutions in parts of the input space when training on new data. Replay Memories are a common solution to the problem, decorrelating and shuffling old and new training samples. They naively store state transitions as they come in, without regard for redundancy. We introduce a novel cognitive-inspired replay memory approach based on the Grow-When-Required (GWR) self-organizing network, which resembles a map-based mental model of the world. Our approach organizes stored transitions into a concise environment-model-like network of state-nodes and transition-edges, merging similar samples to reduce the memory size and increase pair-wise distance among samples, which increases the relevancy of each sample. Overall, our paper shows that map-based experience replay allows for significant memory reduction with only small performance decreases.
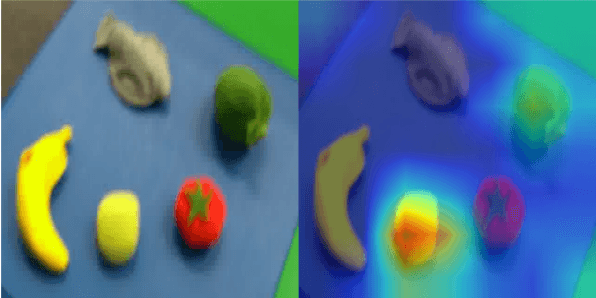
GASP: Gated Attention For Saliency Prediction
Jun 09, 2022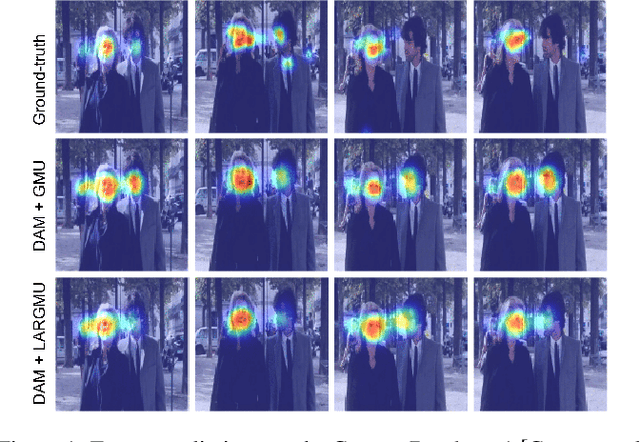
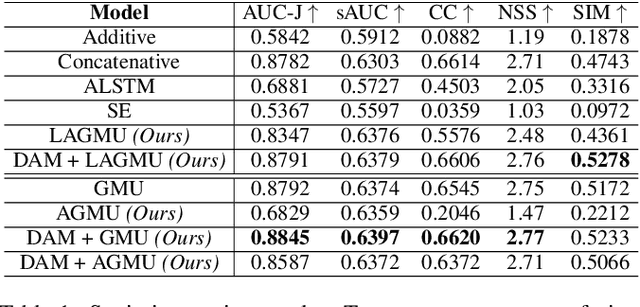
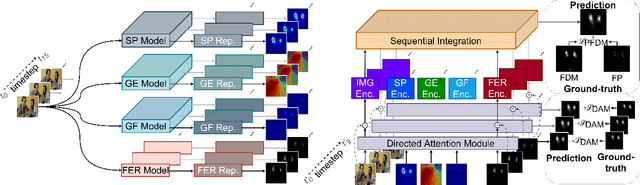
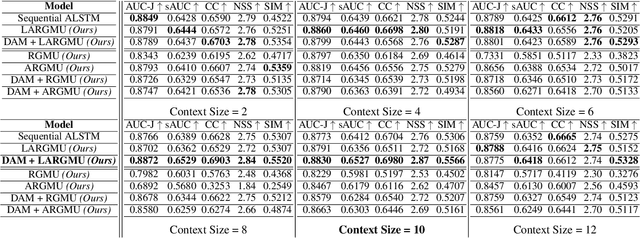
Saliency prediction refers to the computational task of modeling overt attention. Social cues greatly influence our attention, consequently altering our eye movements and behavior. To emphasize the efficacy of such features, we present a neural model for integrating social cues and weighting their influences. Our model consists of two stages. During the first stage, we detect two social cues by following gaze, estimating gaze direction, and recognizing affect. These features are then transformed into spatiotemporal maps through image processing operations. The transformed representations are propagated to the second stage (GASP) where we explore various techniques of late fusion for integrating social cues and introduce two sub-networks for directing attention to relevant stimuli. Our experiments indicate that fusion approaches achieve better results for static integration methods, whereas non-fusion approaches for which the influence of each modality is unknown, result in better outcomes when coupled with recurrent models for dynamic saliency prediction. We show that gaze direction and affective representations contribute a prediction to ground-truth correspondence improvement of at least 5% compared to dynamic saliency models without social cues. Furthermore, affective representations improve GASP, supporting the necessity of considering affect-biased attention in predicting saliency.
* International Joint Conference on Artificial Intelligence (IJCAI-21)
Explain yourself! Effects of Explanations in Human-Robot Interaction
Apr 09, 2022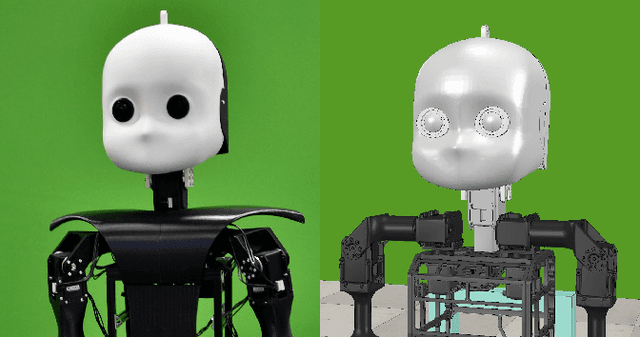
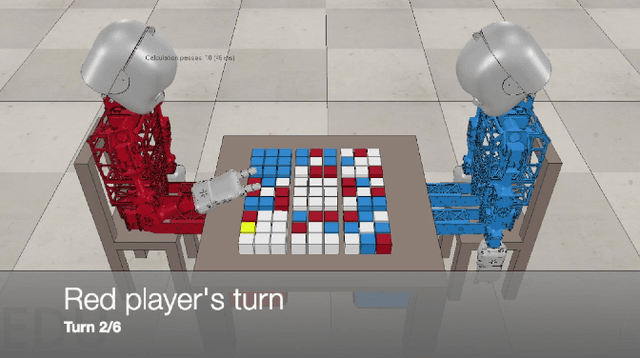
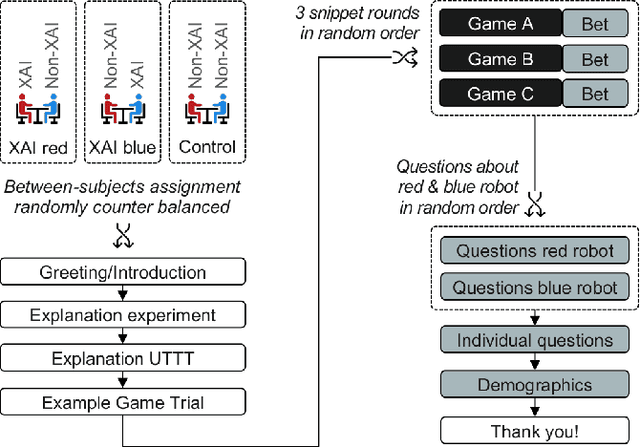
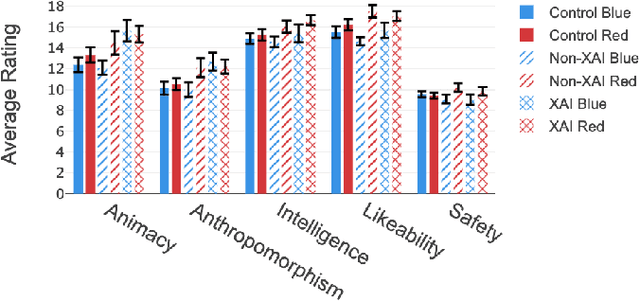
Recent developments in explainable artificial intelligence promise the potential to transform human-robot interaction: Explanations of robot decisions could affect user perceptions, justify their reliability, and increase trust. However, the effects on human perceptions of robots that explain their decisions have not been studied thoroughly. To analyze the effect of explainable robots, we conduct a study in which two simulated robots play a competitive board game. While one robot explains its moves, the other robot only announces them. Providing explanations for its actions was not sufficient to change the perceived competence, intelligence, likeability or safety ratings of the robot. However, the results show that the robot that explains its moves is perceived as more lively and human-like. This study demonstrates the need for and potential of explainable human-robot interaction and the wider assessment of its effects as a novel research direction.
Integrating Intrinsic and Extrinsic Explainability: The Relevance of Understanding Neural Networks for Human-Robot Interaction
Oct 09, 2020
Explainable artificial intelligence (XAI) can help foster trust in and acceptance of intelligent and autonomous systems. Moreover, understanding the motivation for an agent's behavior results in better and more successful collaborations between robots and humans. However, not only can humans benefit from a robot's explanation but the robot itself can also benefit from explanations given to him. Currently, most attention is paid to explaining deep neural networks and black-box models. However, a lot of these approaches are not applicable to humanoid robots. Therefore, in this position paper, current problems with adapting XAI methods to explainable neurorobotics are described. Furthermore, NICO, an open-source humanoid robot platform, is introduced and how the interaction of intrinsic explanations by the robot itself and extrinsic explanations provided by the environment enable efficient robotic behavior.