 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRUN: Reversible Unfolding Network for Concealed Object Segmentation
Jan 30, 2025



Existing concealed object segmentation (COS) methods frequently utilize reversible strategies to address uncertain regions. However, these approaches are typically restricted to the mask domain, leaving the potential of the RGB domain underexplored. To address this, we propose the Reversible Unfolding Network (RUN), which applies reversible strategies across both mask and RGB domains through a theoretically grounded framework, enabling accurate segmentation. RUN first formulates a novel COS model by incorporating an extra residual sparsity constraint to minimize segmentation uncertainties. The iterative optimization steps of the proposed model are then unfolded into a multistage network, with each step corresponding to a stage. Each stage of RUN consists of two reversible modules: the Segmentation-Oriented Foreground Separation (SOFS) module and the Reconstruction-Oriented Background Extraction (ROBE) module. SOFS applies the reversible strategy at the mask level and introduces Reversible State Space to capture non-local information. ROBE extends this to the RGB domain, employing a reconstruction network to address conflicting foreground and background regions identified as distortion-prone areas, which arise from their separate estimation by independent modules. As the stages progress, RUN gradually facilitates reversible modeling of foreground and background in both the mask and RGB domains, directing the network's attention to uncertain regions and mitigating false-positive and false-negative results. Extensive experiments demonstrate the superior performance of RUN and highlight the potential of unfolding-based frameworks for COS and other high-level vision tasks. We will release the code and models.
PlanGPT: Enhancing Urban Planning with Tailored Language Model and Efficient Retrieval
Feb 29, 2024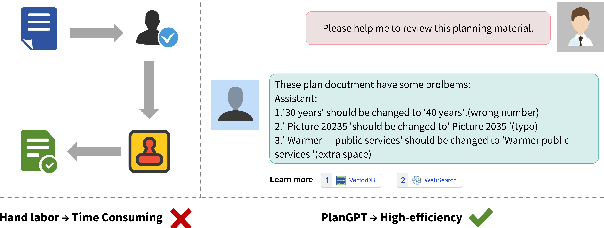
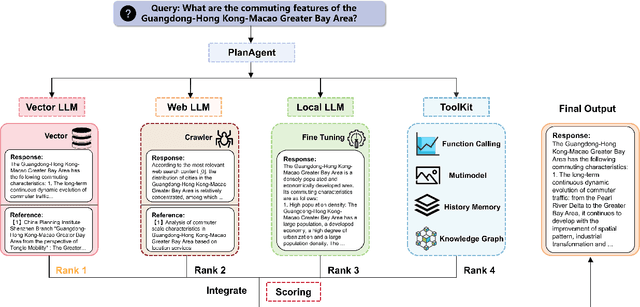
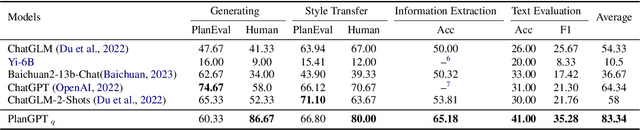
In the field of urban planning, general-purpose large language models often struggle to meet the specific needs of planners. Tasks like generating urban planning texts, retrieving related information, and evaluating planning documents pose unique challenges. To enhance the efficiency of urban professionals and overcome these obstacles, we introduce PlanGPT, the first specialized Large Language Model tailored for urban and spatial planning. Developed through collaborative efforts with institutions like the Chinese Academy of Urban Planning, PlanGPT leverages a customized local database retrieval framework, domain-specific fine-tuning of base models, and advanced tooling capabilities. Empirical tests demonstrate that PlanGPT has achieved advanced performance, delivering responses of superior quality precisely tailored to the intricacies of urban planning.