 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmbeWebAgent: Embedding Web Agents into Any Customized UI
Feb 16, 2026Most web agents operate at the human interface level, observing screenshots or raw DOM trees without application-level access, which limits robustness and action expressiveness. In enterprise settings, however, explicit control of both the frontend and backend is available. We present EmbeWebAgent, a framework for embedding agents directly into existing UIs using lightweight frontend hooks (curated ARIA and URL-based observations, and a per-page function registry exposed via a WebSocket) and a reusable backend workflow that performs reasoning and takes actions. EmbeWebAgent is stack-agnostic (e.g., React or Angular), supports mixed-granularity actions ranging from GUI primitives to higher-level composites, and orchestrates navigation, manipulation, and domain-specific analytics via MCP tools. Our demo shows minimal retrofitting effort and robust multi-step behaviors grounded in a live UI setting. Live Demo: https://youtu.be/Cy06Ljee1JQ
CycleVLA: Proactive Self-Correcting Vision-Language-Action Models via Subtask Backtracking and Minimum Bayes Risk Decoding
Jan 05, 2026Current work on robot failure detection and correction typically operate in a post hoc manner, analyzing errors and applying corrections only after failures occur. This work introduces CycleVLA, a system that equips Vision-Language-Action models (VLAs) with proactive self-correction, the capability to anticipate incipient failures and recover before they fully manifest during execution. CycleVLA achieves this by integrating a progress-aware VLA that flags critical subtask transition points where failures most frequently occur, a VLM-based failure predictor and planner that triggers subtask backtracking upon predicted failure, and a test-time scaling strategy based on Minimum Bayes Risk (MBR) decoding to improve retry success after backtracking. Extensive experiments show that CycleVLA improves performance for both well-trained and under-trained VLAs, and that MBR serves as an effective zero-shot test-time scaling strategy for VLAs. Project Page: https://dannymcy.github.io/cyclevla/
An All-Reduce Compatible Top-K Compressor for Communication-Efficient Distributed Learning
Oct 30, 2025Communication remains a central bottleneck in large-scale distributed machine learning, and gradient sparsification has emerged as a promising strategy to alleviate this challenge. However, existing gradient compressors face notable limitations: Rand-$K$\ discards structural information and performs poorly in practice, while Top-$K$\ preserves informative entries but loses the contraction property and requires costly All-Gather operations. In this paper, we propose ARC-Top-$K$, an {All-Reduce}-Compatible Top-$K$ compressor that aligns sparsity patterns across nodes using a lightweight sketch of the gradient, enabling index-free All-Reduce while preserving globally significant information. ARC-Top-$K$\ is provably contractive and, when combined with momentum error feedback (EF21M), achieves linear speedup and sharper convergence rates than the original EF21M under standard assumptions. Empirically, ARC-Top-$K$\ matches the accuracy of Top-$K$\ while reducing wall-clock training time by up to 60.7\%, offering an efficient and scalable solution that combines the robustness of Rand-$K$\ with the strong performance of Top-$K$.
See, Imagine, Plan: Discovering and Hallucinating Tasks from a Single Image
Mar 24, 2024



Humans can not only recognize and understand the world in its current state but also envision future scenarios that extend beyond immediate perception. To resemble this profound human capacity, we introduce zero-shot task hallucination -- given a single RGB image of any scene comprising unknown environments and objects, our model can identify potential tasks and imagine their execution in a vivid narrative, realized as a video. We develop a modular pipeline that progressively enhances scene decomposition, comprehension, and reconstruction, incorporating VLM for dynamic interaction and 3D motion planning for object trajectories. Our model can discover diverse tasks, with the generated task videos demonstrating realistic and compelling visual outcomes that are understandable by both machines and humans. Project Page: https://dannymcy.github.io/zeroshot_task_hallucination/
Pre-Training LiDAR-Based 3D Object Detectors Through Colorization
Oct 23, 2023Accurate 3D object detection and understanding for self-driving cars heavily relies on LiDAR point clouds, necessitating large amounts of labeled data to train. In this work, we introduce an innovative pre-training approach, Grounded Point Colorization (GPC), to bridge the gap between data and labels by teaching the model to colorize LiDAR point clouds, equipping it with valuable semantic cues. To tackle challenges arising from color variations and selection bias, we incorporate color as "context" by providing ground-truth colors as hints during colorization. Experimental results on the KITTI and Waymo datasets demonstrate GPC's remarkable effectiveness. Even with limited labeled data, GPC significantly improves fine-tuning performance; notably, on just 20% of the KITTI dataset, GPC outperforms training from scratch with the entire dataset. In sum, we introduce a fresh perspective on pre-training for 3D object detection, aligning the objective with the model's intended role and ultimately advancing the accuracy and efficiency of 3D object detection for autonomous vehicles.
vFedSec: Efficient Secure Aggregation for Vertical Federated Learning via Secure Layer
May 26, 2023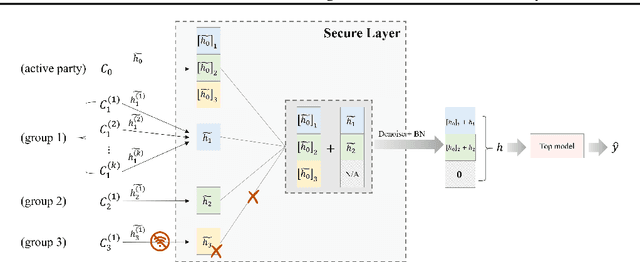



Most work in privacy-preserving federated learning (FL) has been focusing on horizontally partitioned datasets where clients share the same sets of features and can train complete models independently. However, in many interesting problems, individual data points are scattered across different clients/organizations in a vertical setting. Solutions for this type of FL require the exchange of intermediate outputs and gradients between participants, posing a potential risk of privacy leakage when privacy and security concerns are not considered. In this work, we present vFedSec - a novel design with an innovative Secure Layer for training vertical FL securely and efficiently using state-of-the-art security modules in secure aggregation. We theoretically demonstrate that our method does not impact the training performance while protecting private data effectively. Empirically results also show its applicability with extensive experiments that our design can achieve the protection with negligible computation and communication overhead. Also, our method can obtain 9.1e2 ~ 3.8e4 speedup compared to widely-adopted homomorphic encryption (HE) method.
Efficient Vertical Federated Learning with Secure Aggregation
May 18, 2023



The majority of work in privacy-preserving federated learning (FL) has been focusing on horizontally partitioned datasets where clients share the same sets of features and can train complete models independently. However, in many interesting problems, such as financial fraud detection and disease detection, individual data points are scattered across different clients/organizations in vertical federated learning. Solutions for this type of FL require the exchange of gradients between participants and rarely consider privacy and security concerns, posing a potential risk of privacy leakage. In this work, we present a novel design for training vertical FL securely and efficiently using state-of-the-art security modules for secure aggregation. We demonstrate empirically that our method does not impact training performance whilst obtaining 9.1e2 ~3.8e4 speedup compared to homomorphic encryption (HE).
Gradient-less Federated Gradient Boosting Trees with Learnable Learning Rates
May 02, 2023



The privacy-sensitive nature of decentralized datasets and the robustness of eXtreme Gradient Boosting (XGBoost) on tabular data raise the needs to train XGBoost in the context of federated learning (FL). Existing works on federated XGBoost in the horizontal setting rely on the sharing of gradients, which induce per-node level communication frequency and serious privacy concerns. To alleviate these problems, we develop an innovative framework for horizontal federated XGBoost which does not depend on the sharing of gradients and simultaneously boosts privacy and communication efficiency by making the learning rates of the aggregated tree ensembles learnable. We conduct extensive evaluations on various classification and regression datasets, showing our approach achieves performance comparable to the state-of-the-art method and effectively improves communication efficiency by lowering both communication rounds and communication overhead by factors ranging from 25x to 700x.
Touch and Go: Learning from Human-Collected Vision and Touch
Nov 29, 2022The ability to associate touch with sight is essential for tasks that require physically interacting with objects in the world. We propose a dataset with paired visual and tactile data called Touch and Go, in which human data collectors probe objects in natural environments using tactile sensors, while simultaneously recording egocentric video. In contrast to previous efforts, which have largely been confined to lab settings or simulated environments, our dataset spans a large number of "in the wild" objects and scenes. To demonstrate our dataset's effectiveness, we successfully apply it to a variety of tasks: 1) self-supervised visuo-tactile feature learning, 2) tactile-driven image stylization, i.e., making the visual appearance of an object more consistent with a given tactile signal, and 3) predicting future frames of a tactile signal from visuo-tactile inputs.
The Optimization of the Constant Flow Parallel Micropump Using RBF Neural Network
Oct 08, 2021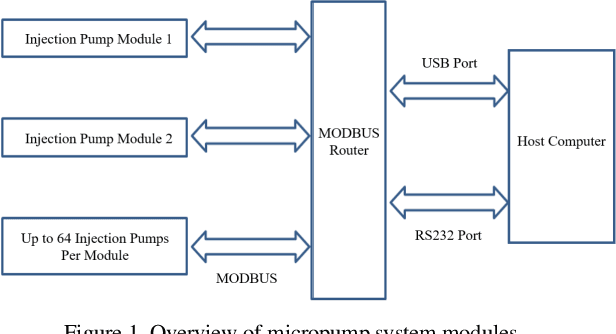
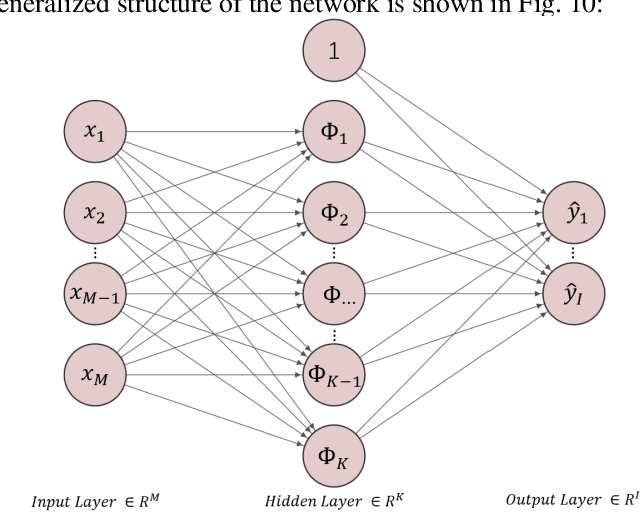
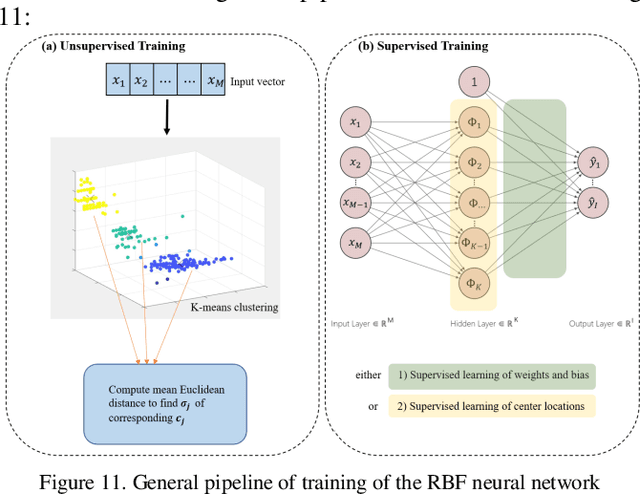
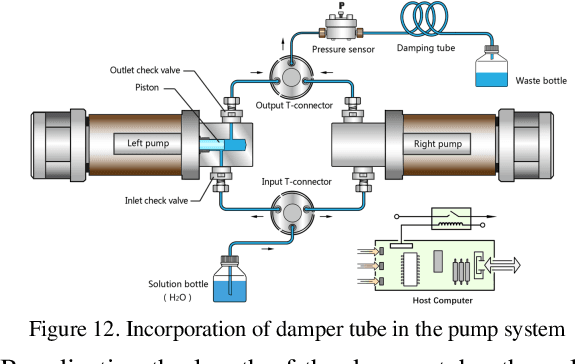
The objective of this work is to optimize the performance of a constant flow parallel mechanical displacement micropump, which has parallel pump chambers and incorporates passive check valves. The critical task is to minimize the pressure pulse caused by regurgitation, which negatively impacts the constant flow rate, during the reciprocating motion when the left and right pumps interchange their role of aspiration and transfusion. Previous works attempt to solve this issue via the mechanical design of passive check valves. In this work, the novel concept of overlap time is proposed, and the issue is solved from the aspect of control theory by implementing a RBF neural network trained by both unsupervised and supervised learning. The experimental results indicate that the pressure pulse is optimized in the range of 0.15 - 0.25 MPa, which is a significant improvement compared to the maximum pump working pressure of 40 MPa.