 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpikCommander: A High-performance Spiking Transformer with Multi-view Learning for Efficient Speech Command Recognition
Nov 13, 2025Spiking neural networks (SNNs) offer a promising path toward energy-efficient speech command recognition (SCR) by leveraging their event-driven processing paradigm. However, existing SNN-based SCR methods often struggle to capture rich temporal dependencies and contextual information from speech due to limited temporal modeling and binary spike-based representations. To address these challenges, we first introduce the multi-view spiking temporal-aware self-attention (MSTASA) module, which combines effective spiking temporal-aware attention with a multi-view learning framework to model complementary temporal dependencies in speech commands. Building on MSTASA, we further propose SpikCommander, a fully spike-driven transformer architecture that integrates MSTASA with a spiking contextual refinement channel MLP (SCR-MLP) to jointly enhance temporal context modeling and channel-wise feature integration. We evaluate our method on three benchmark datasets: the Spiking Heidelberg Dataset (SHD), the Spiking Speech Commands (SSC), and the Google Speech Commands V2 (GSC). Extensive experiments demonstrate that SpikCommander consistently outperforms state-of-the-art (SOTA) SNN approaches with fewer parameters under comparable time steps, highlighting its effectiveness and efficiency for robust speech command recognition.
S$^2$M-Former: Spiking Symmetric Mixing Branchformer for Brain Auditory Attention Detection
Aug 07, 2025



Auditory attention detection (AAD) aims to decode listeners' focus in complex auditory environments from electroencephalography (EEG) recordings, which is crucial for developing neuro-steered hearing devices. Despite recent advancements, EEG-based AAD remains hindered by the absence of synergistic frameworks that can fully leverage complementary EEG features under energy-efficiency constraints. We propose S$^2$M-Former, a novel spiking symmetric mixing framework to address this limitation through two key innovations: i) Presenting a spike-driven symmetric architecture composed of parallel spatial and frequency branches with mirrored modular design, leveraging biologically plausible token-channel mixers to enhance complementary learning across branches; ii) Introducing lightweight 1D token sequences to replace conventional 3D operations, reducing parameters by 14.7$\times$. The brain-inspired spiking architecture further reduces power consumption, achieving a 5.8$\times$ energy reduction compared to recent ANN methods, while also surpassing existing SNN baselines in terms of parameter efficiency and performance. Comprehensive experiments on three AAD benchmarks (KUL, DTU and AV-GC-AAD) across three settings (within-trial, cross-trial and cross-subject) demonstrate that S$^2$M-Former achieves comparable state-of-the-art (SOTA) decoding accuracy, making it a promising low-power, high-performance solution for AAD tasks.
A Survey of Context Engineering for Large Language Models
Jul 17, 2025The performance of Large Language Models (LLMs) is fundamentally determined by the contextual information provided during inference. This survey introduces Context Engineering, a formal discipline that transcends simple prompt design to encompass the systematic optimization of information payloads for LLMs. We present a comprehensive taxonomy decomposing Context Engineering into its foundational components and the sophisticated implementations that integrate them into intelligent systems. We first examine the foundational components: context retrieval and generation, context processing and context management. We then explore how these components are architecturally integrated to create sophisticated system implementations: retrieval-augmented generation (RAG), memory systems and tool-integrated reasoning, and multi-agent systems. Through this systematic analysis of over 1300 research papers, our survey not only establishes a technical roadmap for the field but also reveals a critical research gap: a fundamental asymmetry exists between model capabilities. While current models, augmented by advanced context engineering, demonstrate remarkable proficiency in understanding complex contexts, they exhibit pronounced limitations in generating equally sophisticated, long-form outputs. Addressing this gap is a defining priority for future research. Ultimately, this survey provides a unified framework for both researchers and engineers advancing context-aware AI.
MSVIT: Improving Spiking Vision Transformer Using Multi-scale Attention Fusion
May 19, 2025The combination of Spiking Neural Networks(SNNs) with Vision Transformer architectures has attracted significant attention due to the great potential for energy-efficient and high-performance computing paradigms. However, a substantial performance gap still exists between SNN-based and ANN-based transformer architectures. While existing methods propose spiking self-attention mechanisms that are successfully combined with SNNs, the overall architectures proposed by these methods suffer from a bottleneck in effectively extracting features from different image scales. In this paper, we address this issue and propose MSVIT, a novel spike-driven Transformer architecture, which firstly uses multi-scale spiking attention (MSSA) to enrich the capability of spiking attention blocks. We validate our approach across various main data sets. The experimental results show that MSVIT outperforms existing SNN-based models, positioning itself as a state-of-the-art solution among SNN-transformer architectures. The codes are available at https://github.com/Nanhu-AI-Lab/MSViT.
Efficient Speech Command Recognition Leveraging Spiking Neural Network and Curriculum Learning-based Knowledge Distillation
Dec 17, 2024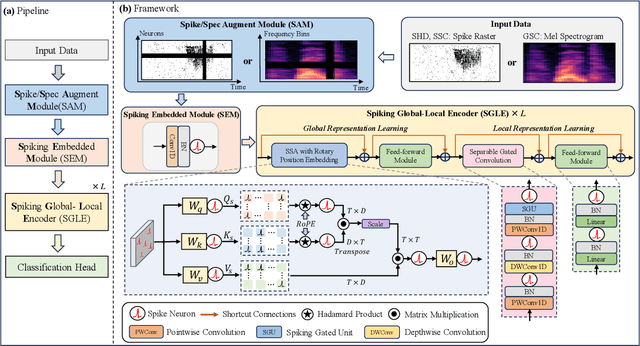
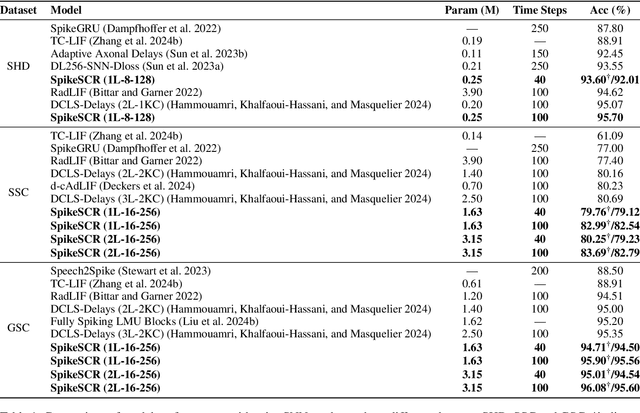
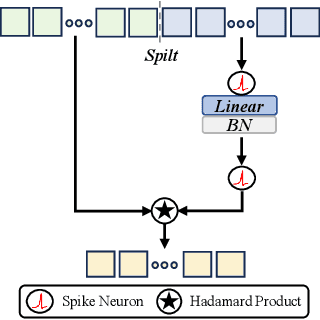
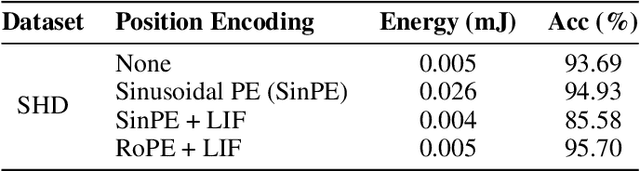
The intrinsic dynamics and event-driven nature of spiking neural networks (SNNs) make them excel in processing temporal information by naturally utilizing embedded time sequences as time steps. Recent studies adopting this approach have demonstrated SNNs' effectiveness in speech command recognition, achieving high performance by employing large time steps for long time sequences. However, the large time steps lead to increased deployment burdens for edge computing applications. Thus, it is important to balance high performance and low energy consumption when detecting temporal patterns in edge devices. Our solution comprises two key components. 1). We propose a high-performance fully spike-driven framework termed SpikeSCR, characterized by a global-local hybrid structure for efficient representation learning, which exhibits long-term learning capabilities with extended time steps. 2). To further fully embrace low energy consumption, we propose an effective knowledge distillation method based on curriculum learning (KDCL), where valuable representations learned from the easy curriculum are progressively transferred to the hard curriculum with minor loss, striking a trade-off between power efficiency and high performance. We evaluate our method on three benchmark datasets: the Spiking Heidelberg Dataset (SHD), the Spiking Speech Commands (SSC), and the Google Speech Commands (GSC) V2. Our experimental results demonstrate that SpikeSCR outperforms current state-of-the-art (SOTA) methods across these three datasets with the same time steps. Furthermore, by executing KDCL, we reduce the number of time steps by 60% and decrease energy consumption by 54.8% while maintaining comparable performance to recent SOTA results. Therefore, this work offers valuable insights for tackling temporal processing challenges with long time sequences in edge neuromorphic computing systems.
SVFormer: A Direct Training Spiking Transformer for Efficient Video Action Recognition
Jun 21, 2024



Video action recognition (VAR) plays crucial roles in various domains such as surveillance, healthcare, and industrial automation, making it highly significant for the society. Consequently, it has long been a research spot in the computer vision field. As artificial neural networks (ANNs) are flourishing, convolution neural networks (CNNs), including 2D-CNNs and 3D-CNNs, as well as variants of the vision transformer (ViT), have shown impressive performance on VAR. However, they usually demand huge computational cost due to the large data volume and heavy information redundancy introduced by the temporal dimension. To address this challenge, some researchers have turned to brain-inspired spiking neural networks (SNNs), such as recurrent SNNs and ANN-converted SNNs, leveraging their inherent temporal dynamics and energy efficiency. Yet, current SNNs for VAR also encounter limitations, such as nontrivial input preprocessing, intricate network construction/training, and the need for repetitive processing of the same video clip, hindering their practical deployment. In this study, we innovatively propose the directly trained SVFormer (Spiking Video transFormer) for VAR. SVFormer integrates local feature extraction, global self-attention, and the intrinsic dynamics, sparsity, and spike-driven nature of SNNs, to efficiently and effectively extract spatio-temporal features. We evaluate SVFormer on two RGB datasets (UCF101, NTU-RGBD60) and one neuromorphic dataset (DVS128-Gesture), demonstrating comparable performance to the mainstream models in a more efficient way. Notably, SVFormer achieves a top-1 accuracy of 84.03% with ultra-low power consumption (21 mJ/video) on UCF101, which is state-of-the-art among directly trained deep SNNs, showcasing significant advantages over prior models.
Direct Training High-Performance Deep Spiking Neural Networks: A Review of Theories and Methods
May 06, 2024



Spiking neural networks (SNNs) offer a promising energy-efficient alternative to artificial neural networks (ANNs), in virtue of their high biological plausibility, rich spatial-temporal dynamics, and event-driven computation. The direct training algorithms based on the surrogate gradient method provide sufficient flexibility to design novel SNN architectures and explore the spatial-temporal dynamics of SNNs. According to previous studies, the performance of models is highly dependent on their sizes. Recently, direct training deep SNNs have achieved great progress on both neuromorphic datasets and large-scale static datasets. Notably, transformer-based SNNs show comparable performance with their ANN counterparts. In this paper, we provide a new perspective to summarize the theories and methods for training deep SNNs with high performance in a systematic and comprehensive way, including theory fundamentals, spiking neuron models, advanced SNN models and residual architectures, software frameworks and neuromorphic hardware, applications, and future trends. The reviewed papers are collected at https://github.com/zhouchenlin2096/Awesome-Spiking-Neural-Networks
QKFormer: Hierarchical Spiking Transformer using Q-K Attention
Mar 25, 2024



Spiking Transformers, which integrate Spiking Neural Networks (SNNs) with Transformer architectures, have attracted significant attention due to their potential for energy efficiency and high performance. However, existing models in this domain still suffer from suboptimal performance. We introduce several innovations to improve the performance: i) We propose a novel spike-form Q-K attention mechanism, tailored for SNNs, which efficiently models the importance of token or channel dimensions through binary vectors with linear complexity. ii) We incorporate the hierarchical structure, which significantly benefits the performance of both the brain and artificial neural networks, into spiking transformers to obtain multi-scale spiking representation. iii) We design a versatile and powerful patch embedding module with a deformed shortcut specifically for spiking transformers. Together, we develop QKFormer, a hierarchical spiking transformer based on Q-K attention with direct training. QKFormer shows significantly superior performance over existing state-of-the-art SNN models on various mainstream datasets. Notably, with comparable size to Spikformer (66.34 M, 74.81%), QKFormer (64.96 M) achieves a groundbreaking top-1 accuracy of 85.65% on ImageNet-1k, substantially outperforming Spikformer by 10.84%. To our best knowledge, this is the first time that directly training SNNs have exceeded 85% accuracy on ImageNet-1K. The code and models are publicly available at https://github.com/zhouchenlin2096/QKFormer
Enhancing the Performance of Transformer-based Spiking Neural Networks by SNN-optimized Downsampling with Precise Gradient Backpropagation
May 19, 2023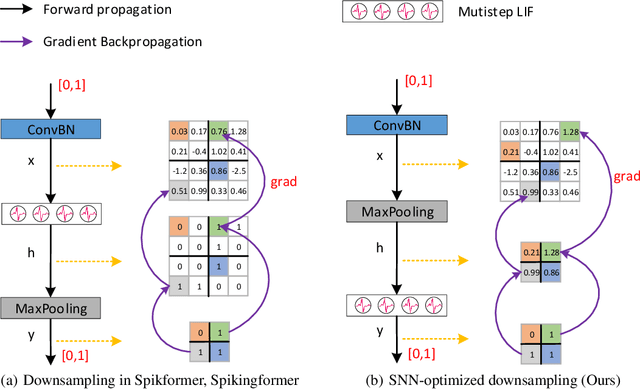
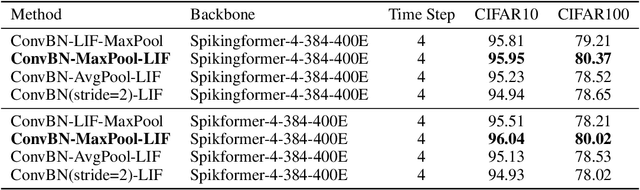
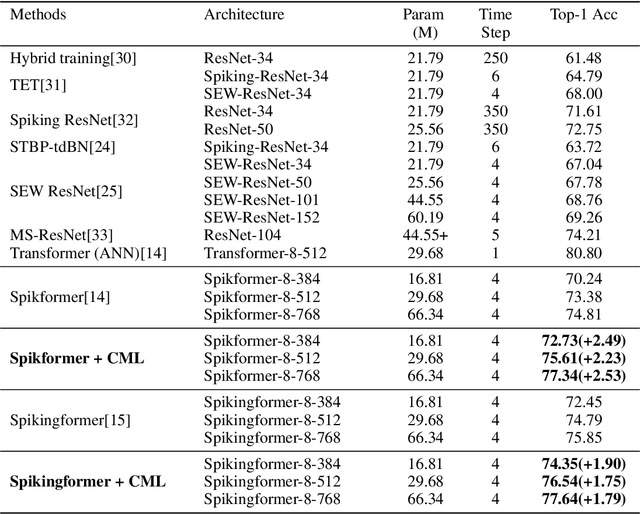
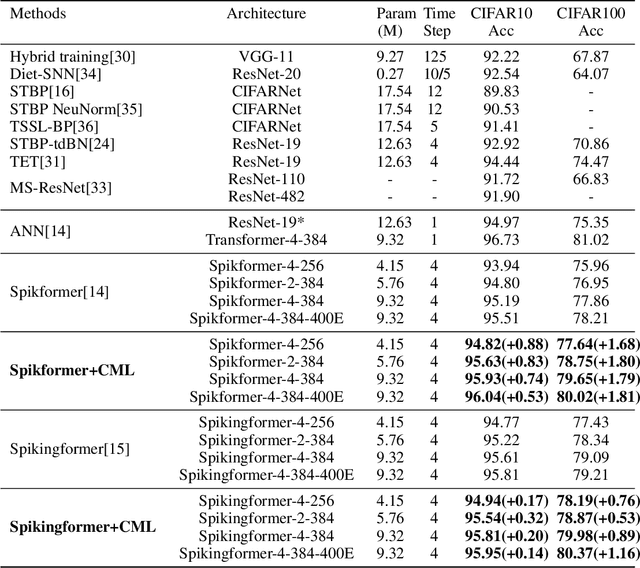
Deep spiking neural networks (SNNs) have drawn much attention in recent years because of their low power consumption, biological rationality and event-driven property. However, state-of-the-art deep SNNs (including Spikformer and Spikingformer) suffer from a critical challenge related to the imprecise gradient backpropagation. This problem arises from the improper design of downsampling modules in these networks, and greatly hampering the overall model performance. In this paper, we propose ConvBN-MaxPooling-LIF (CML), an SNN-optimized downsampling with precise gradient backpropagation. We prove that CML can effectively overcome the imprecision of gradient backpropagation from a theoretical perspective. In addition, we evaluate CML on ImageNet, CIFAR10, CIFAR100, CIFAR10-DVS, DVS128-Gesture datasets, and show state-of-the-art performance on all these datasets with significantly enhanced performances compared with Spikingformer. For instance, our model achieves 77.64 $\%$ on ImageNet, 96.04 $\%$ on CIFAR10, 81.4$\%$ on CIFAR10-DVS, with + 1.79$\%$ on ImageNet, +1.16$\%$ on CIFAR100 compared with Spikingformer.
Spikingformer: Spike-driven Residual Learning for Transformer-based Spiking Neural Network
Apr 24, 2023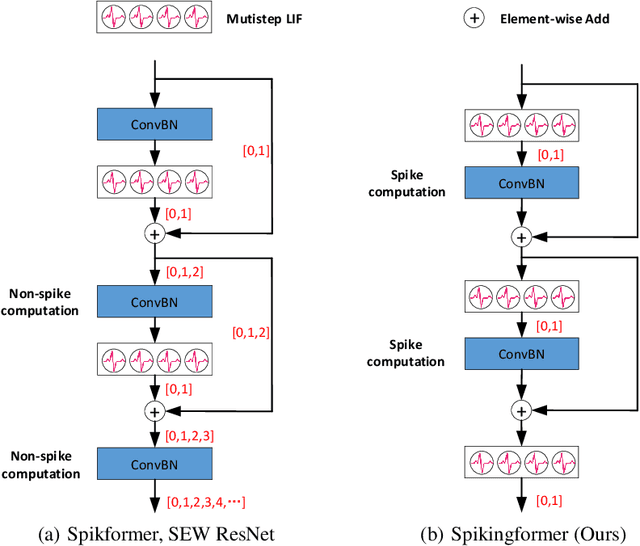
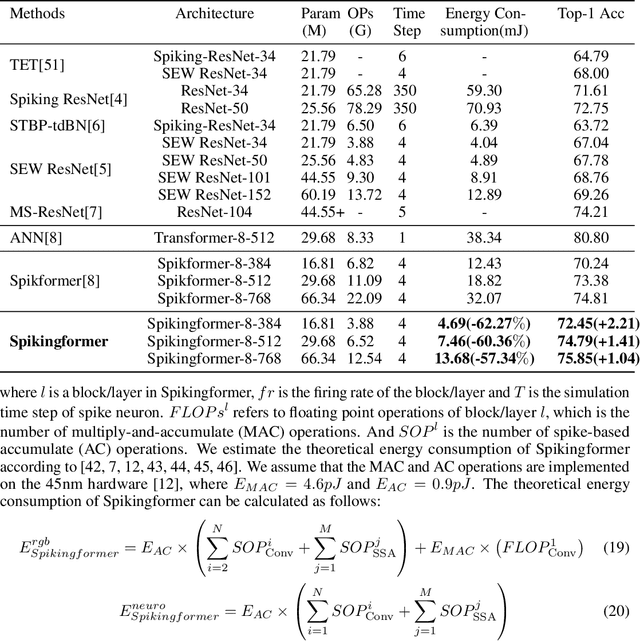
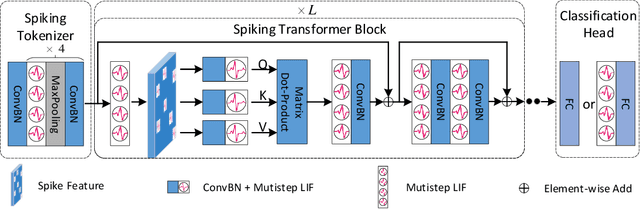
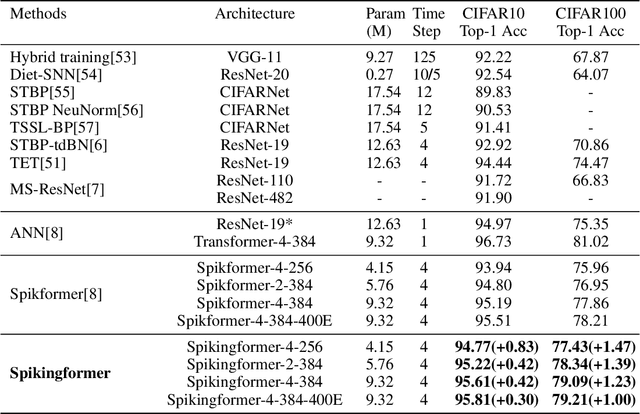
Spiking neural networks (SNNs) offer a promising energy-efficient alternative to artificial neural networks, due to their event-driven spiking computation. However, state-of-the-art deep SNNs (including Spikformer and SEW ResNet) suffer from non-spike computations (integer-float multiplications) caused by the structure of their residual connection. These non-spike computations increase SNNs' power consumption and make them unsuitable for deployment on mainstream neuromorphic hardware, which only supports spike operations. In this paper, we propose a hardware-friendly spike-driven residual learning architecture for SNNs to avoid non-spike computations. Based on this residual design, we develop Spikingformer, a pure transformer-based spiking neural network. We evaluate Spikingformer on ImageNet, CIFAR10, CIFAR100, CIFAR10-DVS and DVS128 Gesture datasets, and demonstrated that Spikingformer outperforms the state-of-the-art in directly trained pure SNNs as a novel advanced backbone (74.79$\%$ top-1 accuracy on ImageNet, + 1.41$\%$ compared with Spikformer). Furthermore, our experiments verify that Spikingformer effectively avoids non-spike computations and reduces energy consumption by 60.34$\%$ compared with Spikformer on ImageNet. To our best knowledge, this is the first time that a pure event-driven transformer-based SNN has been developed.