 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFindings of the 2024 Mandarin Stuttering Event Detection and Automatic Speech Recognition Challenge
Sep 09, 2024



The StutteringSpeech Challenge focuses on advancing speech technologies for people who stutter, specifically targeting Stuttering Event Detection (SED) and Automatic Speech Recognition (ASR) in Mandarin. The challenge comprises three tracks: (1) SED, which aims to develop systems for detection of stuttering events; (2) ASR, which focuses on creating robust systems for recognizing stuttered speech; and (3) Research track for innovative approaches utilizing the provided dataset. We utilizes an open-source Mandarin stuttering dataset AS-70, which has been split into new training and test sets for the challenge. This paper presents the dataset, details the challenge tracks, and analyzes the performance of the top systems, highlighting improvements in detection accuracy and reductions in recognition error rates. Our findings underscore the potential of specialized models and augmentation strategies in developing stuttered speech technologies.
AutoChunk: Automated Activation Chunk for Memory-Efficient Long Sequence Inference
Jan 19, 2024



Large deep learning models have achieved impressive performance across a range of applications. However, their large memory requirements, including parameter memory and activation memory, have become a significant challenge for their practical serving. While existing methods mainly address parameter memory, the importance of activation memory has been overlooked. Especially for long input sequences, activation memory is expected to experience a significant exponential growth as the length of sequences increases. In this approach, we propose AutoChunk, an automatic and adaptive compiler system that efficiently reduces activation memory for long sequence inference by chunk strategies. The proposed system generates chunk plans by optimizing through multiple stages. In each stage, the chunk search pass explores all possible chunk candidates and the chunk selection pass identifies the optimal one. At runtime, AutoChunk employs code generation to automatically apply chunk strategies. The experiments demonstrate that AutoChunk can reduce over 80\% of activation memory while maintaining speed loss within 10%, extend max sequence length by 3.2x to 11.7x, and outperform state-of-the-art methods by a large margin.
Adaptive Kalman-based hybrid car following strategy using TD3 and CACC
Dec 26, 2023In autonomous driving, the hybrid strategy of deep reinforcement learning and cooperative adaptive cruise control (CACC) can fully utilize the advantages of the two algorithms and significantly improve the performance of car following. However, it is challenging for the traditional hybrid strategy based on fixed coefficients to adapt to mixed traffic flow scenarios, which may decrease the performance and even lead to accidents. To address the above problems, a hybrid car following strategy based on an adaptive Kalman Filter is proposed by regarding CACC and Twin Delayed Deep Deterministic Policy Gradient (TD3) algorithms. Different from traditional hybrid strategy based on fixed coefficients, the Kalman gain H, using as an adaptive coefficient, is derived from multi-timestep predictions and Monte Carlo Tree Search. At the end of study, simulation results with 4157745 timesteps indicate that, compared with the TD3 and HCFS algorithms, the proposed algorithm in this study can substantially enhance the safety of car following in mixed traffic flow without compromising the comfort and efficiency.
Hybrid Car-Following Strategy based on Deep Deterministic Policy Gradient and Cooperative Adaptive Cruise Control
Feb 24, 2021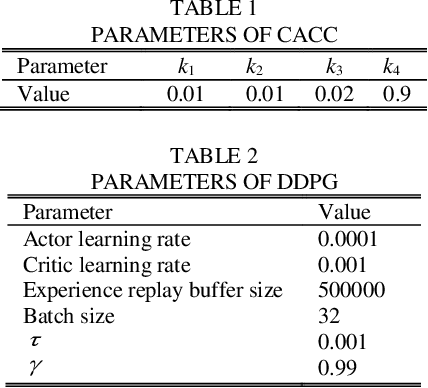
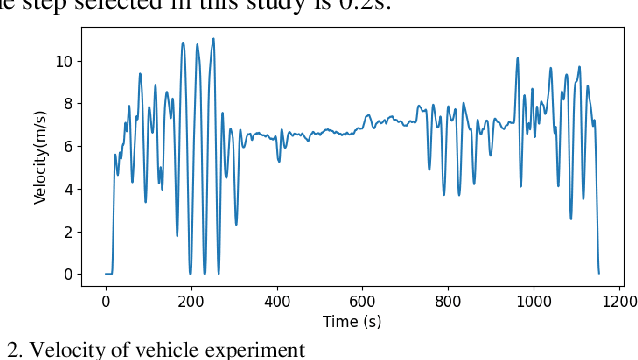

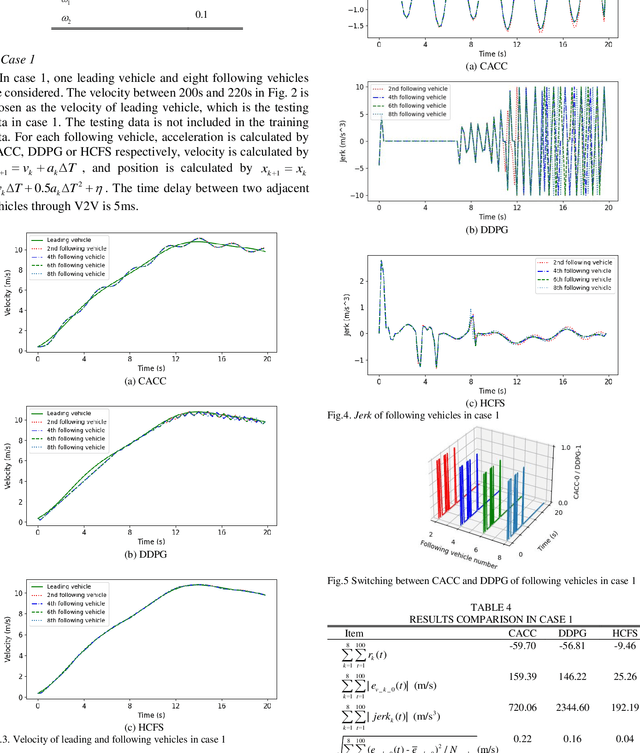
Deep deterministic policy gradient (DDPG) based car-following strategy can break through the constraints of the differential equation model due to the ability of exploration on complex environments. However, the car-following performance of DDPG is usually degraded by unreasonable reward function design, insufficient training and low sampling efficiency. In order to solve this kind of problem, a hybrid car-following strategy based on DDPG and cooperative adaptive cruise control (CACC) is proposed. Firstly, the car-following process is modeled as markov decision process to calculate CACC and DDPG simultaneously at each frame. Given a current state, two actions are obtained from CACC and DDPG, respectively. Then an optimal action, corresponding to the one offering a larger reward, is chosen as the output of the hybrid strategy. Meanwhile, a rule is designed to ensure that the change rate of acceleration is smaller than the desired value. Therefore, the proposed strategy not only guarantees the basic performance of car-following through CACC, but also makes full use of the advantages of exploration on complex environments via DDPG. Finally, simulation results show that the car-following performance of proposed strategy is improved significantly as compared with that of DDPG and CACC in the whole state space.