 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConsistent Instance Field for Dynamic Scene Understanding
Dec 16, 2025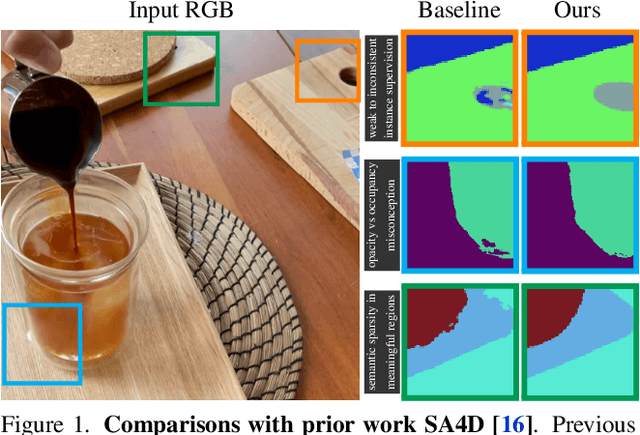
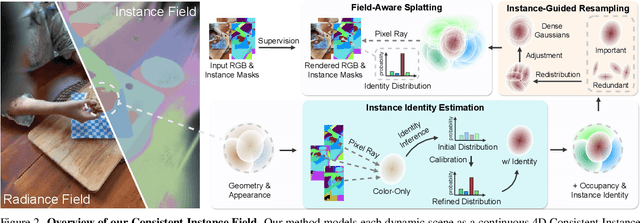
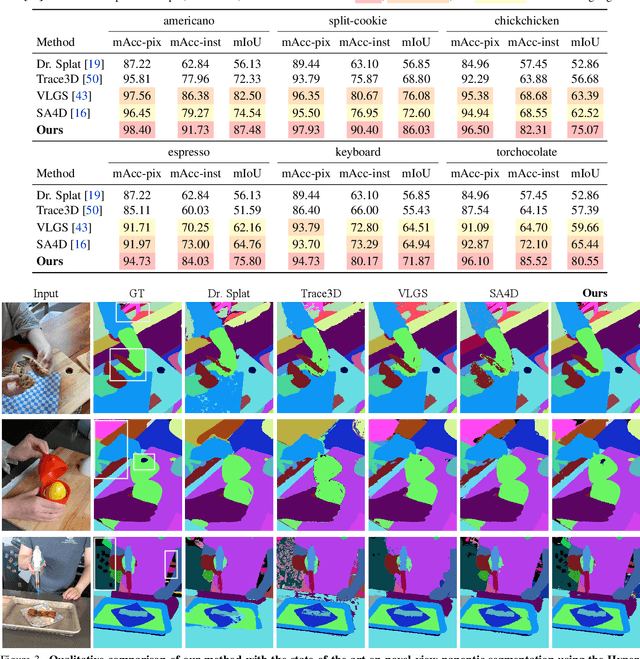
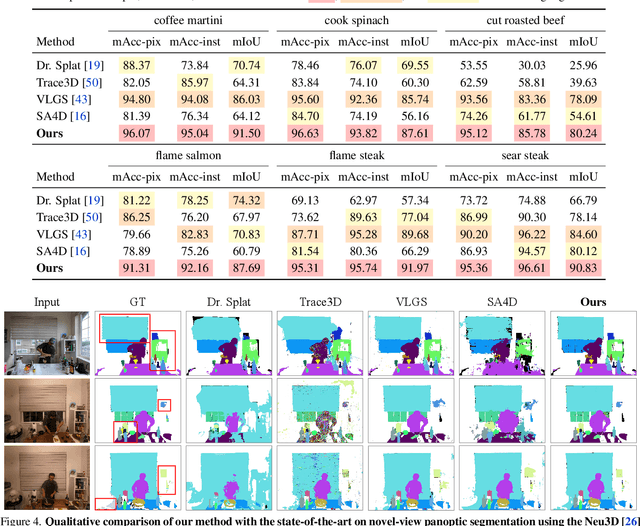
We introduce Consistent Instance Field, a continuous and probabilistic spatio-temporal representation for dynamic scene understanding. Unlike prior methods that rely on discrete tracking or view-dependent features, our approach disentangles visibility from persistent object identity by modeling each space-time point with an occupancy probability and a conditional instance distribution. To realize this, we introduce a novel instance-embedded representation based on deformable 3D Gaussians, which jointly encode radiance and semantic information and are learned directly from input RGB images and instance masks through differentiable rasterization. Furthermore, we introduce new mechanisms to calibrate per-Gaussian identities and resample Gaussians toward semantically active regions, ensuring consistent instance representations across space and time. Experiments on HyperNeRF and Neu3D datasets demonstrate that our method significantly outperforms state-of-the-art methods on novel-view panoptic segmentation and open-vocabulary 4D querying tasks.
From Particles to Fields: Reframing Photon Mapping with Continuous Gaussian Photon Fields
Dec 13, 2025Accurately modeling light transport is essential for realistic image synthesis. Photon mapping provides physically grounded estimates of complex global illumination effects such as caustics and specular-diffuse interactions, yet its per-view radiance estimation remains computationally inefficient when rendering multiple views of the same scene. The inefficiency arises from independent photon tracing and stochastic kernel estimation at each viewpoint, leading to inevitable redundant computation. To accelerate multi-view rendering, we reformulate photon mapping as a continuous and reusable radiance function. Specifically, we introduce the Gaussian Photon Field (GPF), a learnable representation that encodes photon distributions as anisotropic 3D Gaussian primitives parameterized by position, rotation, scale, and spectrum. GPF is initialized from physically traced photons in the first SPPM iteration and optimized using multi-view supervision of final radiance, distilling photon-based light transport into a continuous field. Once trained, the field enables differentiable radiance evaluation along camera rays without repeated photon tracing or iterative refinement. Extensive experiments on scenes with complex light transport, such as caustics and specular-diffuse interactions, demonstrate that GPF attains photon-level accuracy while reducing computation by orders of magnitude, unifying the physical rigor of photon-based rendering with the efficiency of neural scene representations.
Render-FM: A Foundation Model for Real-time Photorealistic Volumetric Rendering
May 22, 2025Volumetric rendering of Computed Tomography (CT) scans is crucial for visualizing complex 3D anatomical structures in medical imaging. Current high-fidelity approaches, especially neural rendering techniques, require time-consuming per-scene optimization, limiting clinical applicability due to computational demands and poor generalizability. We propose Render-FM, a novel foundation model for direct, real-time volumetric rendering of CT scans. Render-FM employs an encoder-decoder architecture that directly regresses 6D Gaussian Splatting (6DGS) parameters from CT volumes, eliminating per-scan optimization through large-scale pre-training on diverse medical data. By integrating robust feature extraction with the expressive power of 6DGS, our approach efficiently generates high-quality, real-time interactive 3D visualizations across diverse clinical CT data. Experiments demonstrate that Render-FM achieves visual fidelity comparable or superior to specialized per-scan methods while drastically reducing preparation time from nearly an hour to seconds for a single inference step. This advancement enables seamless integration into real-time surgical planning and diagnostic workflows. The project page is: https://gaozhongpai.github.io/renderfm/.
PolypSegTrack: Unified Foundation Model for Colonoscopy Video Analysis
Mar 31, 2025



Early detection, accurate segmentation, classification and tracking of polyps during colonoscopy are critical for preventing colorectal cancer. Many existing deep-learning-based methods for analyzing colonoscopic videos either require task-specific fine-tuning, lack tracking capabilities, or rely on domain-specific pre-training. In this paper, we introduce \textit{PolypSegTrack}, a novel foundation model that jointly addresses polyp detection, segmentation, classification and unsupervised tracking in colonoscopic videos. Our approach leverages a novel conditional mask loss, enabling flexible training across datasets with either pixel-level segmentation masks or bounding box annotations, allowing us to bypass task-specific fine-tuning. Our unsupervised tracking module reliably associates polyp instances across frames using object queries, without relying on any heuristics. We leverage a robust vision foundation model backbone that is pre-trained unsupervisedly on natural images, thereby removing the need for domain-specific pre-training. Extensive experiments on multiple polyp benchmarks demonstrate that our method significantly outperforms existing state-of-the-art approaches in detection, segmentation, classification, and tracking.
CHROME: Clothed Human Reconstruction with Occlusion-Resilience and Multiview-Consistency from a Single Image
Mar 19, 2025



Reconstructing clothed humans from a single image is a fundamental task in computer vision with wide-ranging applications. Although existing monocular clothed human reconstruction solutions have shown promising results, they often rely on the assumption that the human subject is in an occlusion-free environment. Thus, when encountering in-the-wild occluded images, these algorithms produce multiview inconsistent and fragmented reconstructions. Additionally, most algorithms for monocular 3D human reconstruction leverage geometric priors such as SMPL annotations for training and inference, which are extremely challenging to acquire in real-world applications. To address these limitations, we propose CHROME: Clothed Human Reconstruction with Occlusion-Resilience and Multiview-ConsistEncy from a Single Image, a novel pipeline designed to reconstruct occlusion-resilient 3D humans with multiview consistency from a single occluded image, without requiring either ground-truth geometric prior annotations or 3D supervision. Specifically, CHROME leverages a multiview diffusion model to first synthesize occlusion-free human images from the occluded input, compatible with off-the-shelf pose control to explicitly enforce cross-view consistency during synthesis. A 3D reconstruction model is then trained to predict a set of 3D Gaussians conditioned on both the occluded input and synthesized views, aligning cross-view details to produce a cohesive and accurate 3D representation. CHROME achieves significant improvements in terms of both novel view synthesis (upto 3 db PSNR) and geometric reconstruction under challenging conditions.
7DGS: Unified Spatial-Temporal-Angular Gaussian Splatting
Mar 11, 2025Real-time rendering of dynamic scenes with view-dependent effects remains a fundamental challenge in computer graphics. While recent advances in Gaussian Splatting have shown promising results separately handling dynamic scenes (4DGS) and view-dependent effects (6DGS), no existing method unifies these capabilities while maintaining real-time performance. We present 7D Gaussian Splatting (7DGS), a unified framework representing scene elements as seven-dimensional Gaussians spanning position (3D), time (1D), and viewing direction (3D). Our key contribution is an efficient conditional slicing mechanism that transforms 7D Gaussians into view- and time-conditioned 3D Gaussians, maintaining compatibility with existing 3D Gaussian Splatting pipelines while enabling joint optimization. Experiments demonstrate that 7DGS outperforms prior methods by up to 7.36 dB in PSNR while achieving real-time rendering (401 FPS) on challenging dynamic scenes with complex view-dependent effects. The project page is: https://gaozhongpai.github.io/7dgs/.
Anatomy-Aware Conditional Image-Text Retrieval
Mar 10, 2025



Image-Text Retrieval (ITR) finds broad applications in healthcare, aiding clinicians and radiologists by automatically retrieving relevant patient cases in the database given the query image and/or report, for more efficient clinical diagnosis and treatment, especially for rare diseases. However conventional ITR systems typically only rely on global image or text representations for measuring patient image/report similarities, which overlook local distinctiveness across patient cases. This often results in suboptimal retrieval performance. In this paper, we propose an Anatomical Location-Conditioned Image-Text Retrieval (ALC-ITR) framework, which, given a query image and the associated suspicious anatomical region(s), aims to retrieve similar patient cases exhibiting the same disease or symptoms in the same anatomical region. To perform location-conditioned multimodal retrieval, we learn a medical Relevance-Region-Aligned Vision Language (RRA-VL) model with semantic global-level and region-/word-level alignment to produce generalizable, well-aligned multi-modal representations. Additionally, we perform location-conditioned contrastive learning to further utilize cross-pair region-level contrastiveness for improved multi-modal retrieval. We show that our proposed RRA-VL achieves state-of-the-art localization performance in phase-grounding tasks, and satisfying multi-modal retrieval performance with or without location conditioning. Finally, we thoroughly investigate the generalizability and explainability of our proposed ALC-ITR system in providing explanations and preliminary diagnosis reports given retrieved patient cases (conditioned on anatomical regions), with proper off-the-shelf LLM prompts.
Neural Finite-State Machines for Surgical Phase Recognition
Nov 27, 2024


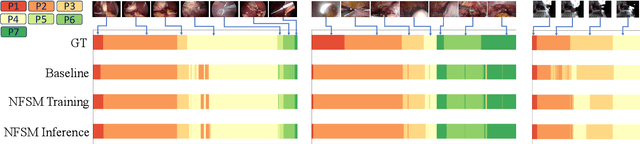
Surgical phase recognition is essential for analyzing procedure-specific surgical videos. While recent transformer-based architectures have advanced sequence processing capabilities, they struggle with maintaining consistency across lengthy surgical procedures. Drawing inspiration from classical hidden Markov models' finite-state interpretations, we introduce the neural finite-state machine (NFSM) module, which bridges procedural understanding with deep learning approaches. NFSM combines procedure-level understanding with neural networks through global state embeddings, attention-based dynamic transition tables, and transition-aware training and inference mechanisms for offline and online applications. When integrated into our future-aware architecture, NFSM improves video-level accuracy, phase-level precision, recall, and Jaccard indices on Cholec80 datasets by 2.3, 3.2, 3.0, and 4.8 percentage points respectively. As an add-on module to existing state-of-the-art models like Surgformer, NFSM further enhances performance, demonstrating its complementary value. Extended experiments on non-surgical datasets validate NFSM's generalizability beyond surgical domains. Comprehensive experiments demonstrate that incorporating NSFM into deep learning frameworks enables more robust and consistent phase recognition across long procedural videos.
Seq2Time: Sequential Knowledge Transfer for Video LLM Temporal Grounding
Nov 25, 2024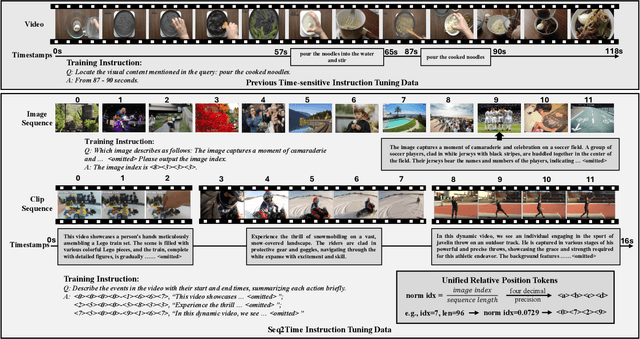

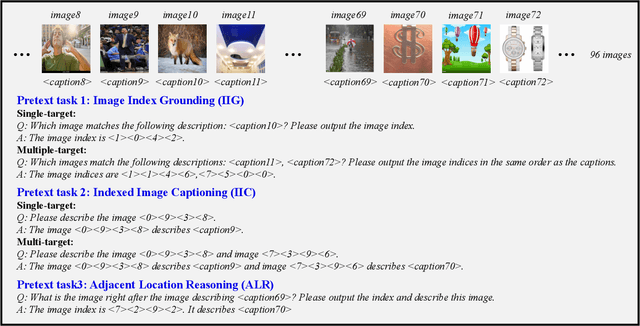

Temporal awareness is essential for video large language models (LLMs) to understand and reason about events within long videos, enabling applications like dense video captioning and temporal video grounding in a unified system. However, the scarcity of long videos with detailed captions and precise temporal annotations limits their temporal awareness. In this paper, we propose Seq2Time, a data-oriented training paradigm that leverages sequences of images and short video clips to enhance temporal awareness in long videos. By converting sequence positions into temporal annotations, we transform large-scale image and clip captioning datasets into sequences that mimic the temporal structure of long videos, enabling self-supervised training with abundant time-sensitive data. To enable sequence-to-time knowledge transfer, we introduce a novel time representation that unifies positional information across image sequences, clip sequences, and long videos. Experiments demonstrate the effectiveness of our method, achieving a 27.6% improvement in F1 score and 44.8% in CIDEr on the YouCook2 benchmark and a 14.7% increase in recall on the Charades-STA benchmark compared to the baseline.
DaRePlane: Direction-aware Representations for Dynamic Scene Reconstruction
Oct 18, 2024Numerous recent approaches to modeling and re-rendering dynamic scenes leverage plane-based explicit representations, addressing slow training times associated with models like neural radiance fields (NeRF) and Gaussian splatting (GS). However, merely decomposing 4D dynamic scenes into multiple 2D plane-based representations is insufficient for high-fidelity re-rendering of scenes with complex motions. In response, we present DaRePlane, a novel direction-aware representation approach that captures scene dynamics from six different directions. This learned representation undergoes an inverse dual-tree complex wavelet transformation (DTCWT) to recover plane-based information. Within NeRF pipelines, DaRePlane computes features for each space-time point by fusing vectors from these recovered planes, then passed to a tiny MLP for color regression. When applied to Gaussian splatting, DaRePlane computes the features of Gaussian points, followed by a tiny multi-head MLP for spatial-time deformation prediction. Notably, to address redundancy introduced by the six real and six imaginary direction-aware wavelet coefficients, we introduce a trainable masking approach, mitigating storage issues without significant performance decline. To demonstrate the generality and efficiency of DaRePlane, we test it on both regular and surgical dynamic scenes, for both NeRF and GS systems. Extensive experiments show that DaRePlane yields state-of-the-art performance in novel view synthesis for various complex dynamic scenes.