 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating randomized smoothing as a defense against adversarial attacks in trajectory prediction
Mar 11, 2026Accurate and robust trajectory prediction is essential for safe and efficient autonomous driving, yet recent work has shown that even state-of-the-art prediction models are highly vulnerable to inputs being mildly perturbed by adversarial attacks. Although model vulnerabilities to such attacks have been studied, work on effective countermeasures remains limited. In this work, we develop and evaluate a new defense mechanism for trajectory prediction models based on randomized smoothing -- an approach previously applied successfully in other domains. We evaluate its ability to improve model robustness through a series of experiments that test different strategies of randomized smoothing. We show that our approach can consistently improve prediction robustness of multiple base trajectory prediction models in various datasets without compromising accuracy in non-adversarial settings. Our results demonstrate that randomized smoothing offers a simple and computationally inexpensive technique for mitigating adversarial attacks in trajectory prediction.
CARE Drive A Framework for Evaluating Reason-Responsiveness of Vision Language Models in Automated Driving
Feb 17, 2026Foundation models, including vision language models, are increasingly used in automated driving to interpret scenes, recommend actions, and generate natural language explanations. However, existing evaluation methods primarily assess outcome based performance, such as safety and trajectory accuracy, without determining whether model decisions reflect human relevant considerations. As a result, it remains unclear whether explanations produced by such models correspond to genuine reason responsive decision making or merely post hoc rationalizations. This limitation is especially significant in safety critical domains because it can create false confidence. To address this gap, we propose CARE Drive, Context Aware Reasons Evaluation for Driving, a model agnostic framework for evaluating reason responsiveness in vision language models applied to automated driving. CARE Drive compares baseline and reason augmented model decisions under controlled contextual variation to assess whether human reasons causally influence decision behavior. The framework employs a two stage evaluation process. Prompt calibration ensures stable outputs. Systematic contextual perturbation then measures decision sensitivity to human reasons such as safety margins, social pressure, and efficiency constraints. We demonstrate CARE Drive in a cyclist overtaking scenario involving competing normative considerations. Results show that explicit human reasons significantly influence model decisions, improving alignment with expert recommended behavior. However, responsiveness varies across contextual factors, indicating uneven sensitivity to different types of reasons. These findings provide empirical evidence that reason responsiveness in foundation models can be systematically evaluated without modifying model parameters.
STEP: Structured Training and Evaluation Platform for benchmarking trajectory prediction models
Sep 18, 2025While trajectory prediction plays a critical role in enabling safe and effective path-planning in automated vehicles, standardized practices for evaluating such models remain underdeveloped. Recent efforts have aimed to unify dataset formats and model interfaces for easier comparisons, yet existing frameworks often fall short in supporting heterogeneous traffic scenarios, joint prediction models, or user documentation. In this work, we introduce STEP -- a new benchmarking framework that addresses these limitations by providing a unified interface for multiple datasets, enforcing consistent training and evaluation conditions, and supporting a wide range of prediction models. We demonstrate the capabilities of STEP in a number of experiments which reveal 1) the limitations of widely-used testing procedures, 2) the importance of joint modeling of agents for better predictions of interactions, and 3) the vulnerability of current state-of-the-art models against both distribution shifts and targeted attacks by adversarial agents. With STEP, we aim to shift the focus from the ``leaderboard'' approach to deeper insights about model behavior and generalization in complex multi-agent settings.
Towards Human-Centric Evaluation of Interaction-Aware Automated Vehicle Controllers: A Framework and Case Study
Aug 07, 2025As automated vehicles (AVs) increasingly integrate into mixed-traffic environments, evaluating their interaction with human-driven vehicles (HDVs) becomes critical. In most research focused on developing new AV control algorithms (controllers), the performance of these algorithms is assessed solely based on performance metrics such as collision avoidance or lane-keeping efficiency, while largely overlooking the human-centred dimensions of interaction with HDVs. This paper proposes a structured evaluation framework that addresses this gap by incorporating metrics grounded in the human-robot interaction literature. The framework spans four key domains: a) interaction effect, b) interaction perception, c) interaction effort, and d) interaction ability. These domains capture both the performance of the AV and its impact on human drivers around it. To demonstrate the utility of the framework, we apply it to a case study evaluating how a state-of-the-art AV controller interacts with human drivers in a merging scenario in a driving simulator. Measuring HDV-HDV interactions as a baseline, this study included one representative metric per domain: a) perceived safety, b) subjective ratings, specifically how participants perceived the other vehicle's driving behaviour (e.g., aggressiveness or predictability) , c) driver workload, and d) merging success. The results showed that incorporating metrics covering all four domains in the evaluation of AV controllers can illuminate critical differences in driver experience when interacting with AVs. This highlights the need for a more comprehensive evaluation approach. Our framework offers researchers, developers, and policymakers a systematic method for assessing AV behaviour beyond technical performance, fostering the development of AVs that are not only functionally capable but also understandable, acceptable, and safe from a human perspective.
Feasible Action Space Reduction for Quantifying Causal Responsibility in Continuous Spatial Interactions
May 23, 2025Understanding the causal influence of one agent on another agent is crucial for safely deploying artificially intelligent systems such as automated vehicles and mobile robots into human-inhabited environments. Existing models of causal responsibility deal with simplified abstractions of scenarios with discrete actions, thus, limiting real-world use when understanding responsibility in spatial interactions. Based on the assumption that spatially interacting agents are embedded in a scene and must follow an action at each instant, Feasible Action-Space Reduction (FeAR) was proposed as a metric for causal responsibility in a grid-world setting with discrete actions. Since real-world interactions involve continuous action spaces, this paper proposes a formulation of the FeAR metric for measuring causal responsibility in space-continuous interactions. We illustrate the utility of the metric in prototypical space-sharing conflicts, and showcase its applications for analysing backward-looking responsibility and in estimating forward-looking responsibility to guide agent decision making. Our results highlight the potential of the FeAR metric for designing and engineering artificial agents, as well as for assessing the responsibility of agents around humans.
Realistic Adversarial Attacks for Robustness Evaluation of Trajectory Prediction Models via Future State Perturbation
May 09, 2025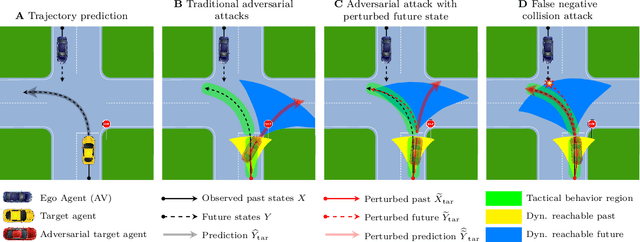
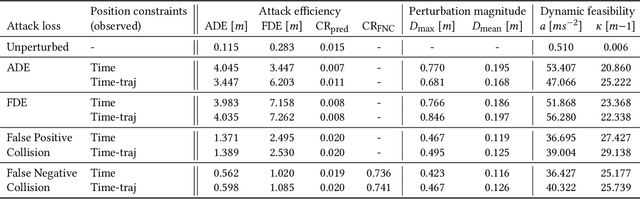
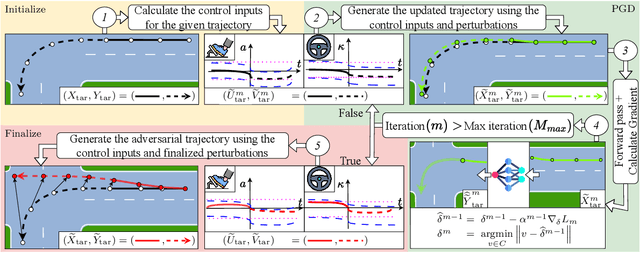
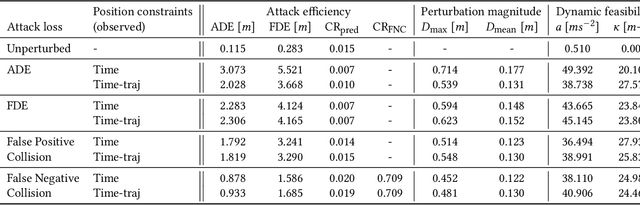
Trajectory prediction is a key element of autonomous vehicle systems, enabling them to anticipate and react to the movements of other road users. Evaluating the robustness of prediction models against adversarial attacks is essential to ensure their reliability in real-world traffic. However, current approaches tend to focus on perturbing the past positions of surrounding agents, which can generate unrealistic scenarios and overlook critical vulnerabilities. This limitation may result in overly optimistic assessments of model performance in real-world conditions. In this work, we demonstrate that perturbing not just past but also future states of adversarial agents can uncover previously undetected weaknesses and thereby provide a more rigorous evaluation of model robustness. Our novel approach incorporates dynamic constraints and preserves tactical behaviors, enabling more effective and realistic adversarial attacks. We introduce new performance measures to assess the realism and impact of these adversarial trajectories. Testing our method on a state-of-the-art prediction model revealed significant increases in prediction errors and collision rates under adversarial conditions. Qualitative analysis further showed that our attacks can expose critical weaknesses, such as the inability of the model to detect potential collisions in what appear to be safe predictions. These results underscore the need for more comprehensive adversarial testing to better evaluate and improve the reliability of trajectory prediction models for autonomous vehicles.
Understanding Driver Cognition and Decision-Making Behaviors in High-Risk Scenarios: A Drift Diffusion Perspective
Mar 16, 2025

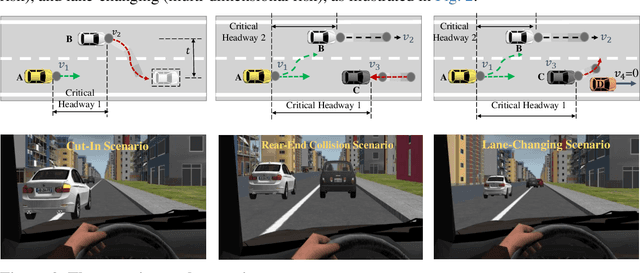
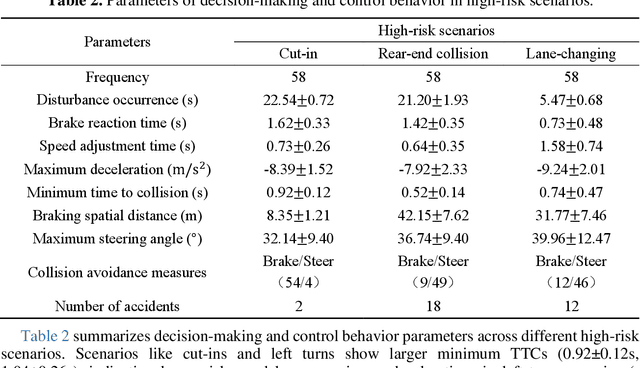
Ensuring safe interactions between autonomous vehicles (AVs) and human drivers in mixed traffic systems remains a major challenge, particularly in complex, high-risk scenarios. This paper presents a cognition-decision framework that integrates individual variability and commonalities in driver behavior to quantify risk cognition and model dynamic decision-making. First, a risk sensitivity model based on a multivariate Gaussian distribution is developed to characterize individual differences in risk cognition. Then, a cognitive decision-making model based on the drift diffusion model (DDM) is introduced to capture common decision-making mechanisms in high-risk environments. The DDM dynamically adjusts decision thresholds by integrating initial bias, drift rate, and boundary parameters, adapting to variations in speed, relative distance, and risk sensitivity to reflect diverse driving styles and risk preferences. By simulating high-risk scenarios with lateral, longitudinal, and multidimensional risk sources in a driving simulator, the proposed model accurately predicts cognitive responses and decision behaviors during emergency maneuvers. Specifically, by incorporating driver-specific risk sensitivity, the model enables dynamic adjustments of key DDM parameters, allowing for personalized decision-making representations in diverse scenarios. Comparative analysis with IDM, Gipps, and MOBIL demonstrates that DDM more precisely captures human cognitive processes and adaptive decision-making in high-risk scenarios. These findings provide a theoretical basis for modeling human driving behavior and offer critical insights for enhancing AV-human interaction in real-world traffic environments.
Hybrid Human-Machine Perception via Adaptive LiDAR for Advanced Driver Assistance Systems
Feb 24, 2025


Accurate environmental perception is critical for advanced driver assistance systems (ADAS). Light detection and ranging (LiDAR) systems play a crucial role in ADAS; they can reliably detect obstacles and help ensure traffic safety. Existing research on LiDAR sensing has demonstrated that adapting the LiDAR's resolution and range based on environmental characteristics can improve machine perception. However, current adaptive LiDAR approaches for ADAS have not explored the possibility of combining the perception abilities of the vehicle and the human driver, which can potentially further enhance the detection performance. In this paper, we propose a novel system that adapts LiDAR characteristics to human driver's visual perception to enhance LiDAR sensing outside human's field of view. We develop a proof-of-concept prototype of the system in the virtual environment CARLA. Our system integrates real-time data on the driver's gaze to identify regions in the environment that the driver is monitoring. This allows the system to optimize LiDAR resources by dynamically increasing the LiDAR's range and resolution in peripheral areas that the driver may not be attending to. Our simulations show that this gaze-aware LiDAR enhances detection performance compared to a baseline standalone LiDAR, particularly in challenging environmental conditions like fog. Our hybrid human-machine sensing approach potentially offers improved safety and situational awareness in real-time driving scenarios for ADAS applications.
Safe Spot: Perceived safety of dominant and submissive appearances of quadruped robots in human-robot interactions
Mar 08, 2024



Unprecedented possibilities of quadruped robots have driven much research on the technical aspects of these robots. However, the social perception and acceptability of quadruped robots so far remain poorly understood. This work investigates whether the way we design quadruped robots' behaviors can affect people's perception of safety in interactions with these robots. We designed and tested a dominant and submissive personality for the quadruped robot (Boston Dynamics Spot). These were tested in two different walking scenarios (head-on and crossing interactions) in a 2x2 within-subjects study. We collected both behavioral data and subjective reports on participants' perception of the interaction. The results highlight that participants perceived the submissive robot as safer compared to the dominant one. The behavioral dynamics of interactions did not change depending on the robot's appearance. Participants' previous in-person experience with the robot was associated with lower subjective safety ratings but did not correlate with the interaction dynamics. Our findings have implications for the design of quadruped robots and contribute to the body of knowledge on the social perception of non-humanoid robots. We call for a stronger standing of felt experiences in human-robot interaction research.
ARMCHAIR: integrated inverse reinforcement learning and model predictive control for human-robot collaboration
Feb 29, 2024



One of the key issues in human-robot collaboration is the development of computational models that allow robots to predict and adapt to human behavior. Much progress has been achieved in developing such models, as well as control techniques that address the autonomy problems of motion planning and decision-making in robotics. However, the integration of computational models of human behavior with such control techniques still poses a major challenge, resulting in a bottleneck for efficient collaborative human-robot teams. In this context, we present a novel architecture for human-robot collaboration: Adaptive Robot Motion for Collaboration with Humans using Adversarial Inverse Reinforcement learning (ARMCHAIR). Our solution leverages adversarial inverse reinforcement learning and model predictive control to compute optimal trajectories and decisions for a mobile multi-robot system that collaborates with a human in an exploration task. During the mission, ARMCHAIR operates without human intervention, autonomously identifying the necessity to support and acting accordingly. Our approach also explicitly addresses the network connectivity requirement of the human-robot team. Extensive simulation-based evaluations demonstrate that ARMCHAIR allows a group of robots to safely support a simulated human in an exploration scenario, preventing collisions and network disconnections, and improving the overall performance of the task.