 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRealistic Adversarial Attacks for Robustness Evaluation of Trajectory Prediction Models via Future State Perturbation
May 09, 2025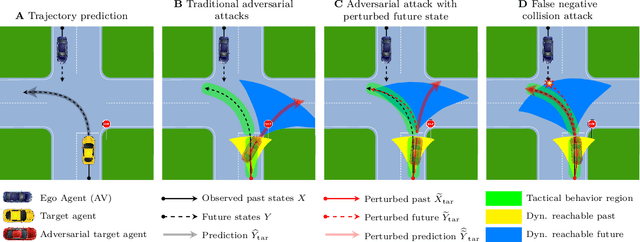
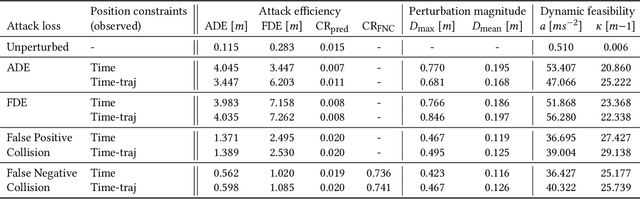
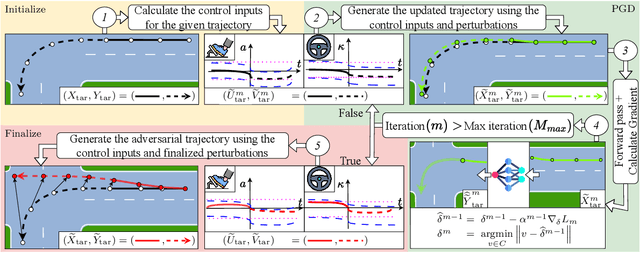
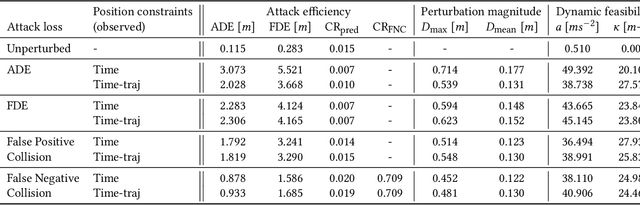
Trajectory prediction is a key element of autonomous vehicle systems, enabling them to anticipate and react to the movements of other road users. Evaluating the robustness of prediction models against adversarial attacks is essential to ensure their reliability in real-world traffic. However, current approaches tend to focus on perturbing the past positions of surrounding agents, which can generate unrealistic scenarios and overlook critical vulnerabilities. This limitation may result in overly optimistic assessments of model performance in real-world conditions. In this work, we demonstrate that perturbing not just past but also future states of adversarial agents can uncover previously undetected weaknesses and thereby provide a more rigorous evaluation of model robustness. Our novel approach incorporates dynamic constraints and preserves tactical behaviors, enabling more effective and realistic adversarial attacks. We introduce new performance measures to assess the realism and impact of these adversarial trajectories. Testing our method on a state-of-the-art prediction model revealed significant increases in prediction errors and collision rates under adversarial conditions. Qualitative analysis further showed that our attacks can expose critical weaknesses, such as the inability of the model to detect potential collisions in what appear to be safe predictions. These results underscore the need for more comprehensive adversarial testing to better evaluate and improve the reliability of trajectory prediction models for autonomous vehicles.
A survey on robustness in trajectory prediction for autonomous vehicles
Feb 08, 2024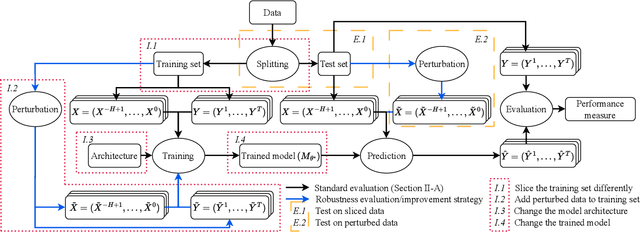
Autonomous vehicles rely on accurate trajectory prediction to inform decision-making processes related to navigation and collision avoidance. However, current trajectory prediction models show signs of overfitting, which may lead to unsafe or suboptimal behavior. To address these challenges, this paper presents a comprehensive framework that categorizes and assesses the definitions and strategies used in the literature on evaluating and improving the robustness of trajectory prediction models. This involves a detailed exploration of various approaches, including data slicing methods, perturbation techniques, model architecture changes, and post-training adjustments. In the literature, we see many promising methods for increasing robustness, which are necessary for safe and reliable autonomous driving.