 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating randomized smoothing as a defense against adversarial attacks in trajectory prediction
Mar 11, 2026Accurate and robust trajectory prediction is essential for safe and efficient autonomous driving, yet recent work has shown that even state-of-the-art prediction models are highly vulnerable to inputs being mildly perturbed by adversarial attacks. Although model vulnerabilities to such attacks have been studied, work on effective countermeasures remains limited. In this work, we develop and evaluate a new defense mechanism for trajectory prediction models based on randomized smoothing -- an approach previously applied successfully in other domains. We evaluate its ability to improve model robustness through a series of experiments that test different strategies of randomized smoothing. We show that our approach can consistently improve prediction robustness of multiple base trajectory prediction models in various datasets without compromising accuracy in non-adversarial settings. Our results demonstrate that randomized smoothing offers a simple and computationally inexpensive technique for mitigating adversarial attacks in trajectory prediction.
Scalable Verification of Neural Control Barrier Functions Using Linear Bound Propagation
Nov 09, 2025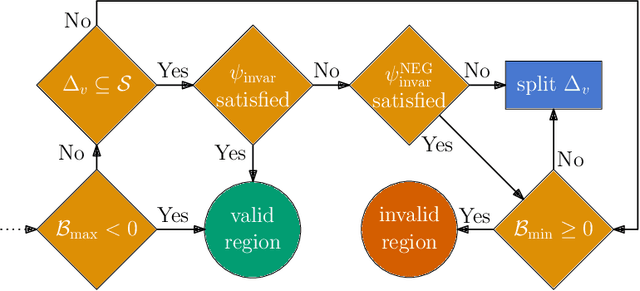
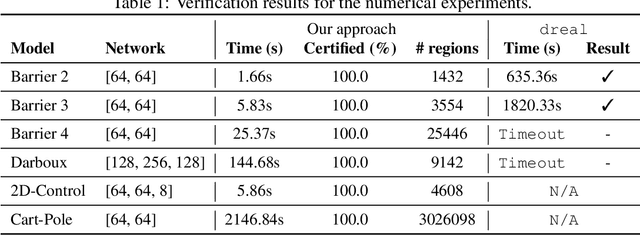
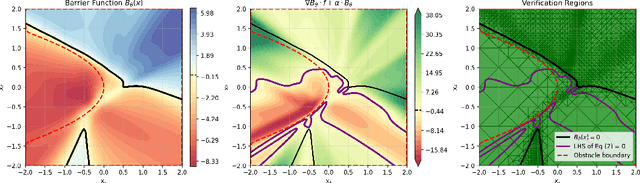
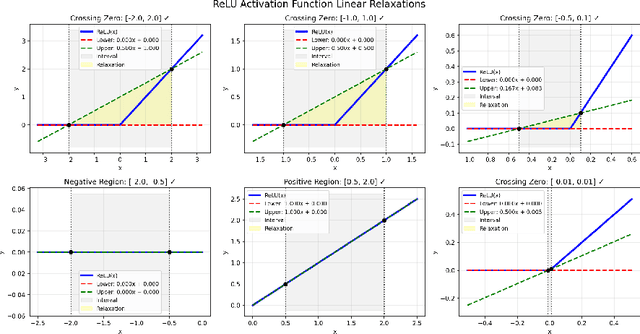
Control barrier functions (CBFs) are a popular tool for safety certification of nonlinear dynamical control systems. Recently, CBFs represented as neural networks have shown great promise due to their expressiveness and applicability to a broad class of dynamics and safety constraints. However, verifying that a trained neural network is indeed a valid CBF is a computational bottleneck that limits the size of the networks that can be used. To overcome this limitation, we present a novel framework for verifying neural CBFs based on piecewise linear upper and lower bounds on the conditions required for a neural network to be a CBF. Our approach is rooted in linear bound propagation (LBP) for neural networks, which we extend to compute bounds on the gradients of the network. Combined with McCormick relaxation, we derive linear upper and lower bounds on the CBF conditions, thereby eliminating the need for computationally expensive verification procedures. Our approach applies to arbitrary control-affine systems and a broad range of nonlinear activation functions. To reduce conservatism, we develop a parallelizable refinement strategy that adaptively refines the regions over which these bounds are computed. Our approach scales to larger neural networks than state-of-the-art verification procedures for CBFs, as demonstrated by our numerical experiments.
Certified Neural Approximations of Nonlinear Dynamics
May 21, 2025Neural networks hold great potential to act as approximate models of nonlinear dynamical systems, with the resulting neural approximations enabling verification and control of such systems. However, in safety-critical contexts, the use of neural approximations requires formal bounds on their closeness to the underlying system. To address this fundamental challenge, we propose a novel, adaptive, and parallelizable verification method based on certified first-order models. Our approach provides formal error bounds on the neural approximations of dynamical systems, allowing them to be safely employed as surrogates by interpreting the error bound as bounded disturbances acting on the approximated dynamics. We demonstrate the effectiveness and scalability of our method on a range of established benchmarks from the literature, showing that it outperforms the state-of-the-art. Furthermore, we highlight the flexibility of our framework by applying it to two novel scenarios not previously explored in this context: neural network compression and an autoencoder-based deep learning architecture for learning Koopman operators, both yielding compelling results.
Realistic Adversarial Attacks for Robustness Evaluation of Trajectory Prediction Models via Future State Perturbation
May 09, 2025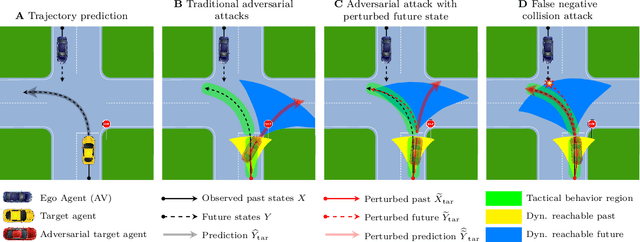
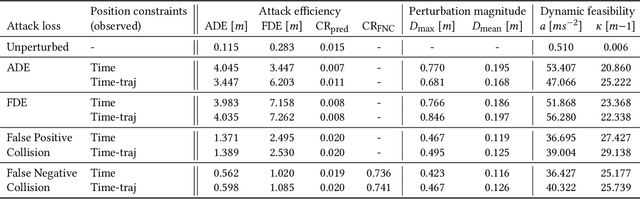
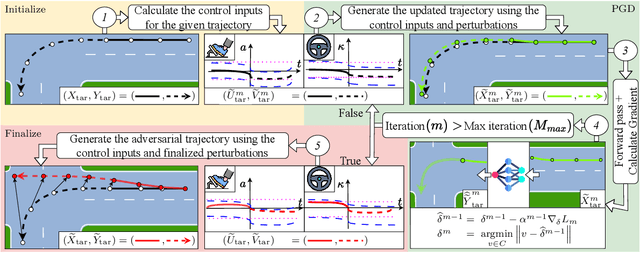
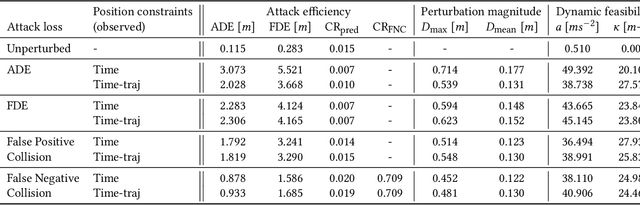
Trajectory prediction is a key element of autonomous vehicle systems, enabling them to anticipate and react to the movements of other road users. Evaluating the robustness of prediction models against adversarial attacks is essential to ensure their reliability in real-world traffic. However, current approaches tend to focus on perturbing the past positions of surrounding agents, which can generate unrealistic scenarios and overlook critical vulnerabilities. This limitation may result in overly optimistic assessments of model performance in real-world conditions. In this work, we demonstrate that perturbing not just past but also future states of adversarial agents can uncover previously undetected weaknesses and thereby provide a more rigorous evaluation of model robustness. Our novel approach incorporates dynamic constraints and preserves tactical behaviors, enabling more effective and realistic adversarial attacks. We introduce new performance measures to assess the realism and impact of these adversarial trajectories. Testing our method on a state-of-the-art prediction model revealed significant increases in prediction errors and collision rates under adversarial conditions. Qualitative analysis further showed that our attacks can expose critical weaknesses, such as the inability of the model to detect potential collisions in what appear to be safe predictions. These results underscore the need for more comprehensive adversarial testing to better evaluate and improve the reliability of trajectory prediction models for autonomous vehicles.
Data-Driven Permissible Safe Control with Barrier Certificates
Apr 30, 2024This paper introduces a method of identifying a maximal set of safe strategies from data for stochastic systems with unknown dynamics using barrier certificates. The first step is learning the dynamics of the system via Gaussian process (GP) regression and obtaining probabilistic errors for this estimate. Then, we develop an algorithm for constructing piecewise stochastic barrier functions to find a maximal permissible strategy set using the learned GP model, which is based on sequentially pruning the worst controls until a maximal set is identified. The permissible strategies are guaranteed to maintain probabilistic safety for the true system. This is especially important for learning-enabled systems, because a rich strategy space enables additional data collection and complex behaviors while remaining safe. Case studies on linear and nonlinear systems demonstrate that increasing the size of the dataset for learning the system grows the permissible strategy set.
Piecewise Stochastic Barrier Functions
Apr 29, 2024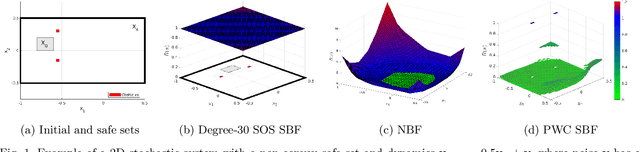
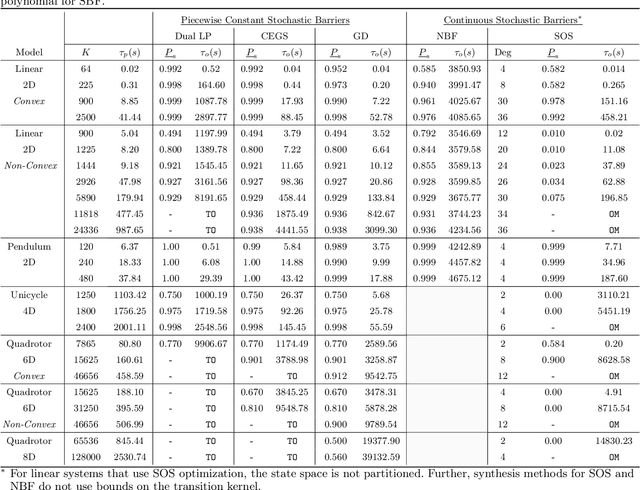
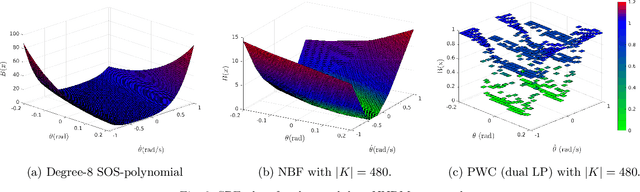
This paper presents a novel stochastic barrier function (SBF) framework for safety analysis of stochastic systems based on piecewise (PW) functions. We first outline a general formulation of PW-SBFs. Then, we focus on PW-Constant (PWC) SBFs and show how their simplicity yields computational advantages for general stochastic systems. Specifically, we prove that synthesis of PWC-SBFs reduces to a minimax optimization problem. Then, we introduce three efficient algorithms to solve this problem, each offering distinct advantages and disadvantages. The first algorithm is based on dual linear programming (LP), which provides an exact solution to the minimax optimization problem. The second is a more scalable algorithm based on iterative counter-example guided synthesis, which involves solving two smaller LPs. The third algorithm solves the minimax problem using gradient descent, which admits even better scalability. We provide an extensive evaluation of these methods on various case studies, including neural network dynamic models, nonlinear switched systems, and high-dimensional linear systems. Our benchmarks demonstrate that PWC-SBFs outperform state-of-the-art methods, namely sum-of-squares and neural barrier functions, and can scale to eight dimensional systems.
A survey on robustness in trajectory prediction for autonomous vehicles
Feb 08, 2024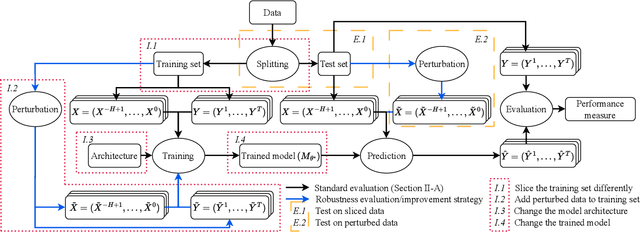
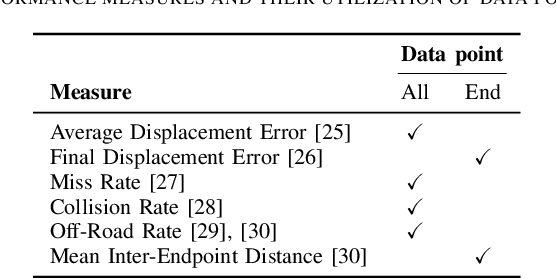
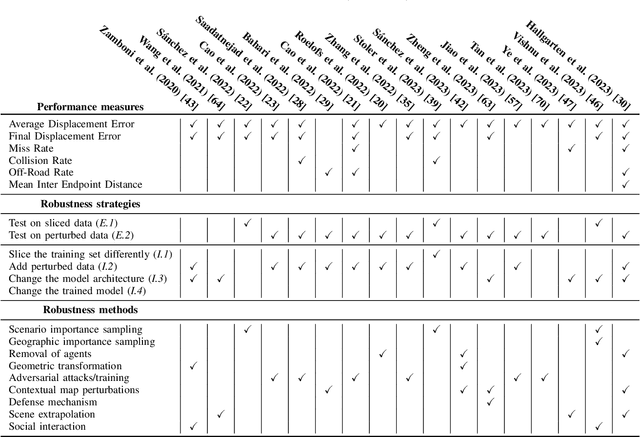
Autonomous vehicles rely on accurate trajectory prediction to inform decision-making processes related to navigation and collision avoidance. However, current trajectory prediction models show signs of overfitting, which may lead to unsafe or suboptimal behavior. To address these challenges, this paper presents a comprehensive framework that categorizes and assesses the definitions and strategies used in the literature on evaluating and improving the robustness of trajectory prediction models. This involves a detailed exploration of various approaches, including data slicing methods, perturbation techniques, model architecture changes, and post-training adjustments. In the literature, we see many promising methods for increasing robustness, which are necessary for safe and reliable autonomous driving.
Safety Certification for Stochastic Systems via Neural Barrier Functions
Jun 03, 2022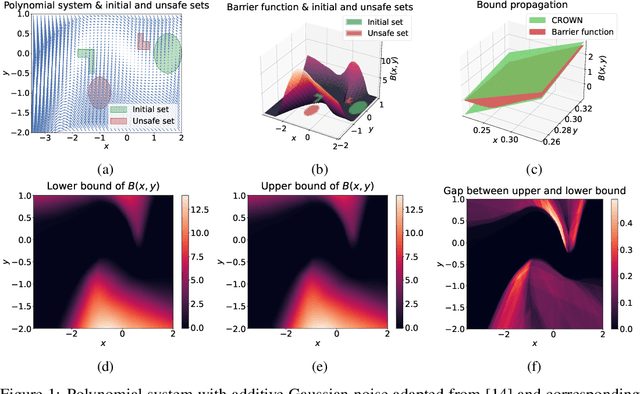
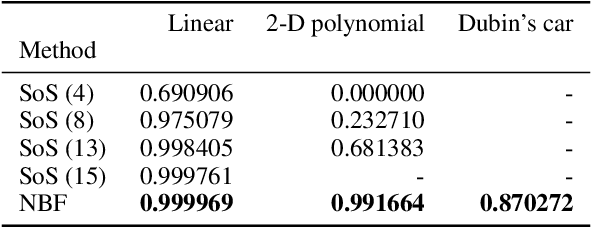
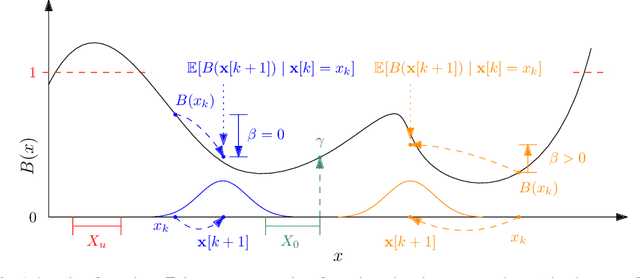
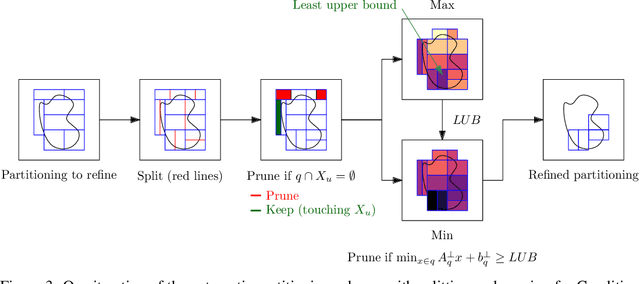
Providing non-trivial certificates of safety for non-linear stochastic systems is an important open problem that limits the wider adoption of autonomous systems in safety-critical applications. One promising solution to address this problem is barrier functions. The composition of a barrier function with a stochastic system forms a supermartingale, thus enabling the computation of the probability that the system stays in a safe set over a finite time horizon via martingale inequalities. However, existing approaches to find barrier functions for stochastic systems generally rely on convex optimization programs that restrict the search of a barrier to a small class of functions such as low degree SoS polynomials and can be computationally expensive. In this paper, we parameterize a barrier function as a neural network and show that techniques for robust training of neural networks can be successfully employed to find neural barrier functions. Specifically, we leverage bound propagation techniques to certify that a neural network satisfies the conditions to be a barrier function via linear programming and then employ the resulting bounds at training time to enforce the satisfaction of these conditions. We also present a branch-and-bound scheme that makes the certification framework scalable. We show that our approach outperforms existing methods in several case studies and often returns certificates of safety that are orders of magnitude larger.