 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSTEP: Structured Training and Evaluation Platform for benchmarking trajectory prediction models
Sep 18, 2025While trajectory prediction plays a critical role in enabling safe and effective path-planning in automated vehicles, standardized practices for evaluating such models remain underdeveloped. Recent efforts have aimed to unify dataset formats and model interfaces for easier comparisons, yet existing frameworks often fall short in supporting heterogeneous traffic scenarios, joint prediction models, or user documentation. In this work, we introduce STEP -- a new benchmarking framework that addresses these limitations by providing a unified interface for multiple datasets, enforcing consistent training and evaluation conditions, and supporting a wide range of prediction models. We demonstrate the capabilities of STEP in a number of experiments which reveal 1) the limitations of widely-used testing procedures, 2) the importance of joint modeling of agents for better predictions of interactions, and 3) the vulnerability of current state-of-the-art models against both distribution shifts and targeted attacks by adversarial agents. With STEP, we aim to shift the focus from the ``leaderboard'' approach to deeper insights about model behavior and generalization in complex multi-agent settings.
Realistic Adversarial Attacks for Robustness Evaluation of Trajectory Prediction Models via Future State Perturbation
May 09, 2025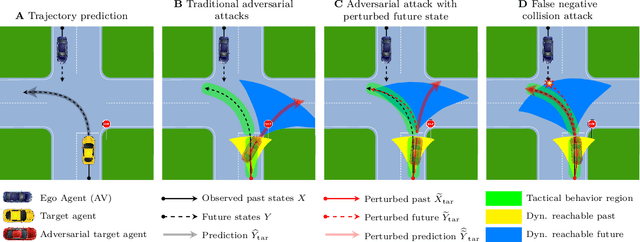
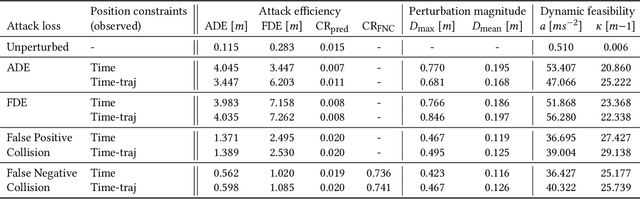
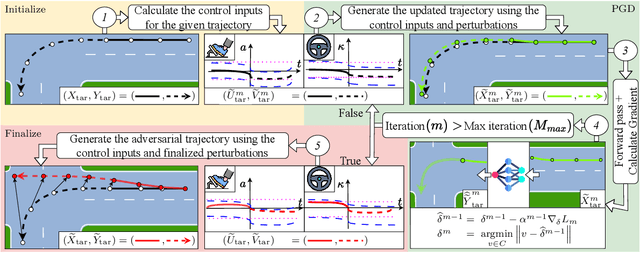
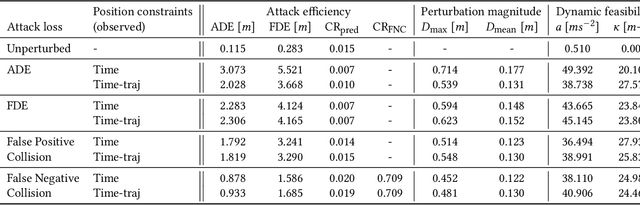
Trajectory prediction is a key element of autonomous vehicle systems, enabling them to anticipate and react to the movements of other road users. Evaluating the robustness of prediction models against adversarial attacks is essential to ensure their reliability in real-world traffic. However, current approaches tend to focus on perturbing the past positions of surrounding agents, which can generate unrealistic scenarios and overlook critical vulnerabilities. This limitation may result in overly optimistic assessments of model performance in real-world conditions. In this work, we demonstrate that perturbing not just past but also future states of adversarial agents can uncover previously undetected weaknesses and thereby provide a more rigorous evaluation of model robustness. Our novel approach incorporates dynamic constraints and preserves tactical behaviors, enabling more effective and realistic adversarial attacks. We introduce new performance measures to assess the realism and impact of these adversarial trajectories. Testing our method on a state-of-the-art prediction model revealed significant increases in prediction errors and collision rates under adversarial conditions. Qualitative analysis further showed that our attacks can expose critical weaknesses, such as the inability of the model to detect potential collisions in what appear to be safe predictions. These results underscore the need for more comprehensive adversarial testing to better evaluate and improve the reliability of trajectory prediction models for autonomous vehicles.
A survey on robustness in trajectory prediction for autonomous vehicles
Feb 08, 2024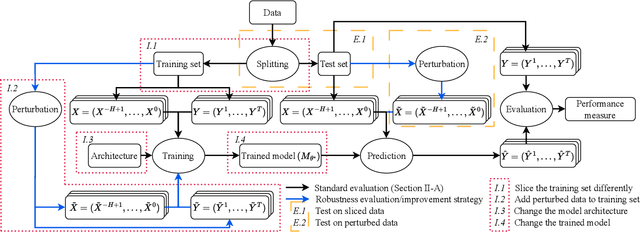
Autonomous vehicles rely on accurate trajectory prediction to inform decision-making processes related to navigation and collision avoidance. However, current trajectory prediction models show signs of overfitting, which may lead to unsafe or suboptimal behavior. To address these challenges, this paper presents a comprehensive framework that categorizes and assesses the definitions and strategies used in the literature on evaluating and improving the robustness of trajectory prediction models. This involves a detailed exploration of various approaches, including data slicing methods, perturbation techniques, model architecture changes, and post-training adjustments. In the literature, we see many promising methods for increasing robustness, which are necessary for safe and reliable autonomous driving.
Robust Multi-Modal Density Estimation
Jan 19, 2024

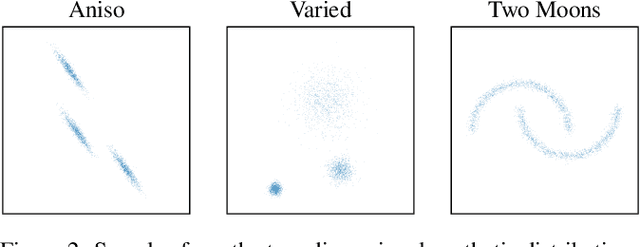

Development of multi-modal, probabilistic prediction models has lead to a need for comprehensive evaluation metrics. While several metrics can characterize the accuracy of machine-learned models (e.g., negative log-likelihood, Jensen-Shannon divergence), these metrics typically operate on probability densities. Applying them to purely sample-based prediction models thus requires that the underlying density function is estimated. However, common methods such as kernel density estimation (KDE) have been demonstrated to lack robustness, while more complex methods have not been evaluated in multi-modal estimation problems. In this paper, we present ROME (RObust Multi-modal density Estimator), a non-parametric approach for density estimation which addresses the challenge of estimating multi-modal, non-normal, and highly correlated distributions. ROME utilizes clustering to segment a multi-modal set of samples into multiple uni-modal ones and then combines simple KDE estimates obtained for individual clusters in a single multi-modal estimate. We compared our approach to state-of-the-art methods for density estimation as well as ablations of ROME, showing that it not only outperforms established methods but is also more robust to a variety of distributions. Our results demonstrate that ROME can overcome the issues of over-fitting and over-smoothing exhibited by other estimators, promising a more robust evaluation of probabilistic machine learning models.
Smooth-Trajectron++: Augmenting the Trajectron++ behaviour prediction model with smooth attention
Jun 02, 2023



Understanding traffic participants' behaviour is crucial for predicting their future trajectories, aiding in developing safe and reliable planning systems for autonomous vehicles. Integrating cognitive processes and machine learning models has shown promise in other domains but is lacking in the trajectory forecasting of multiple traffic agents in large-scale autonomous driving datasets. This work investigates the state-of-the-art trajectory forecasting model Trajectron++ which we enhance by incorporating a smoothing term in its attention module. This attention mechanism mimics human attention inspired by cognitive science research indicating limits to attention switching. We evaluate the performance of the resulting Smooth-Trajectron++ model and compare it to the original model on various benchmarks, revealing the potential of incorporating insights from human cognition into trajectory prediction models.
Using Models Based on Cognitive Theory to Predict Human Behavior in Traffic: A Case Study
May 24, 2023The development of automated vehicles has the potential to revolutionize transportation, but they are currently unable to ensure a safe and time-efficient driving style. Reliable models predicting human behavior are essential for overcoming this issue. While data-driven models are commonly used to this end, they can be vulnerable in safety-critical edge cases. This has led to an interest in models incorporating cognitive theory, but as such models are commonly developed for explanatory purposes, this approach's effectiveness in behavior prediction has remained largely untested so far. In this article, we investigate the usefulness of the \emph{Commotions} model -- a novel cognitively plausible model incorporating the latest theories of human perception, decision-making, and motor control -- for predicting human behavior in gap acceptance scenarios, which entail many important traffic interactions such as lane changes and intersections. We show that this model can compete with or even outperform well-established data-driven prediction models across several naturalistic datasets. These results demonstrate the promise of incorporating cognitive theory in behavior prediction models for automated vehicles.
Fighting the curse of dimensionality: A machine learning approach to finding global optima
Oct 28, 2021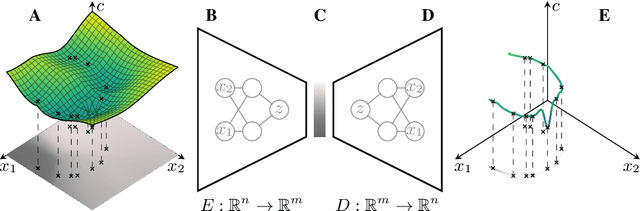
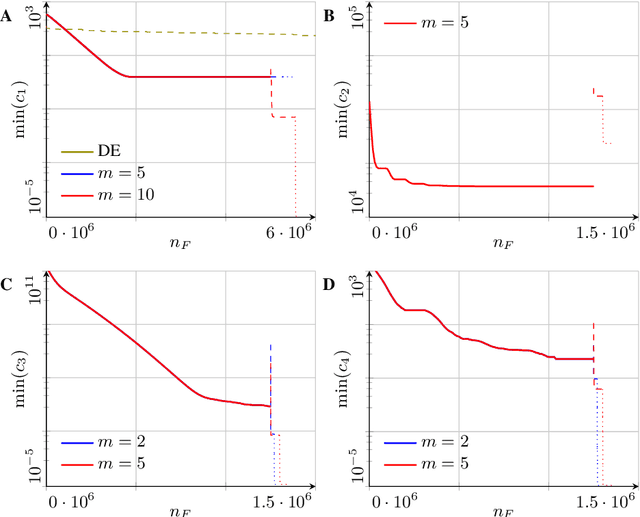
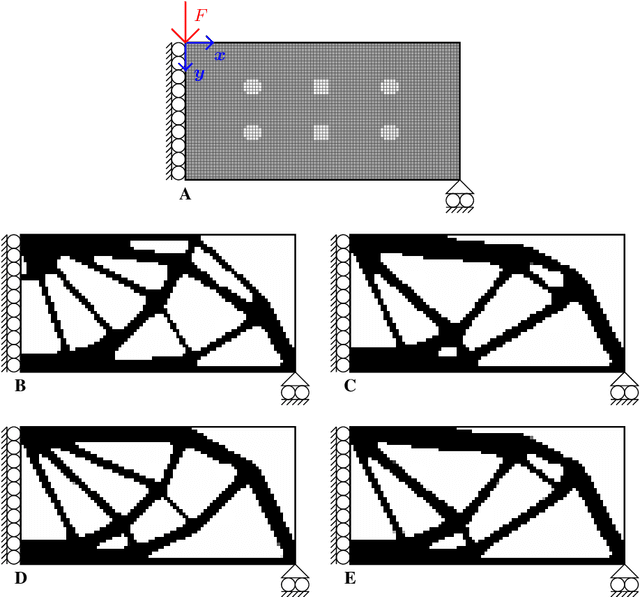
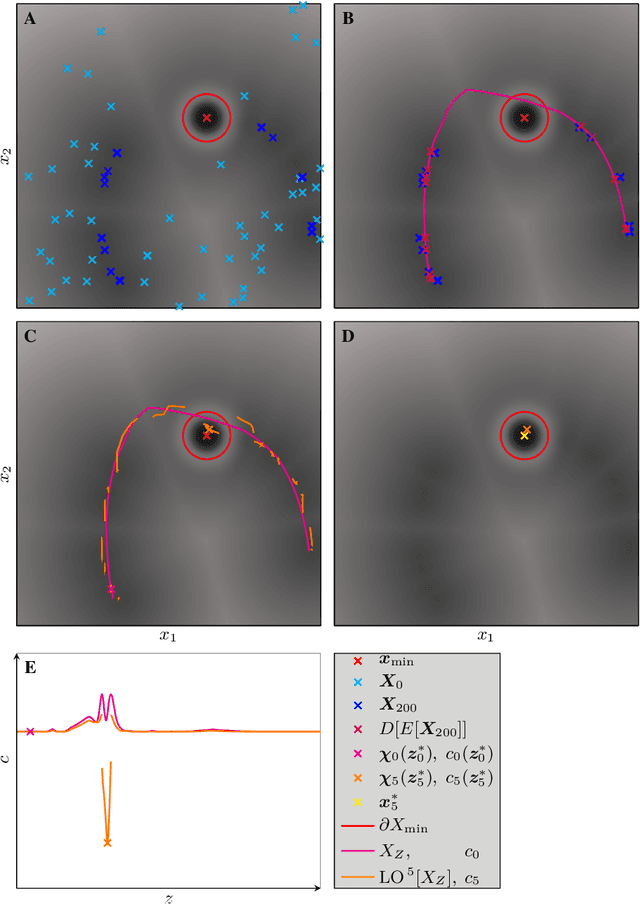
Finding global optima in high-dimensional optimization problems is extremely challenging since the number of function evaluations required to sufficiently explore the design space increases exponentially with its dimensionality. Furthermore, non-convex cost functions render local gradient-based search techniques ineffective. To overcome these difficulties, here we demonstrate the use of machine learning to find global minima, whereby autoencoders are used to drastically reduce the search space dimensionality, and optima are found by surveying the lower-dimensional latent spaces. The methodology is tested on benchmark functions and on a structural optimization problem, where we show that by exploiting the behavior of certain cost functions we either obtain the global optimum at best or obtain superior results at worst when compared to established optimization procedures.