 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStructure-preserving contrastive learning for spatial time series
Feb 10, 2025



Informative representations enhance model performance and generalisability in downstream tasks. However, learning self-supervised representations for spatially characterised time series, like traffic interactions, poses challenges as it requires maintaining fine-grained similarity relations in the latent space. In this study, we incorporate two structure-preserving regularisers for the contrastive learning of spatial time series: one regulariser preserves the topology of similarities between instances, and the other preserves the graph geometry of similarities across spatial and temporal dimensions. To balance contrastive learning and structure preservation, we propose a dynamic mechanism that adaptively weighs the trade-off and stabilises training. We conduct experiments on multivariate time series classification, as well as macroscopic and microscopic traffic prediction. For all three tasks, our approach preserves the structures of similarity relations more effectively and improves state-of-the-art task performances. The proposed approach can be applied to an arbitrary encoder and is particularly beneficial for time series with spatial or geographical features. Furthermore, this study suggests that higher similarity structure preservation indicates more informative and useful representations. This may help to understand the contribution of representation learning in pattern recognition with neural networks. Our code is made openly accessible with all resulting data at https://github.com/yiru-jiao/spclt.
Safety Certification for Stochastic Systems via Neural Barrier Functions
Jun 03, 2022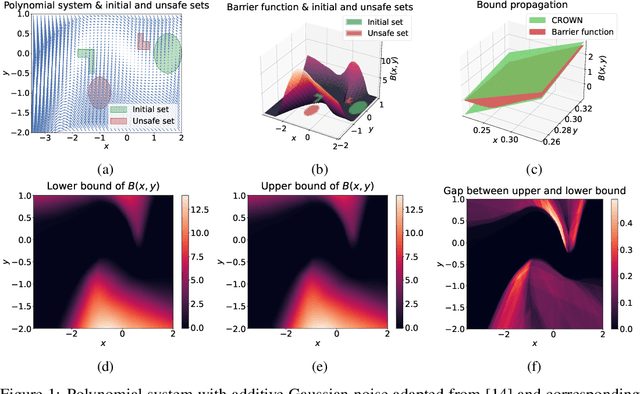
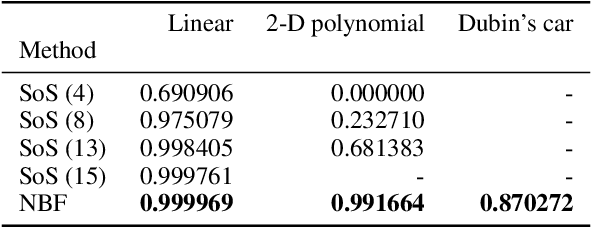
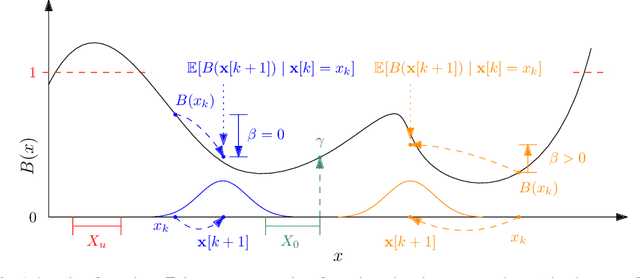
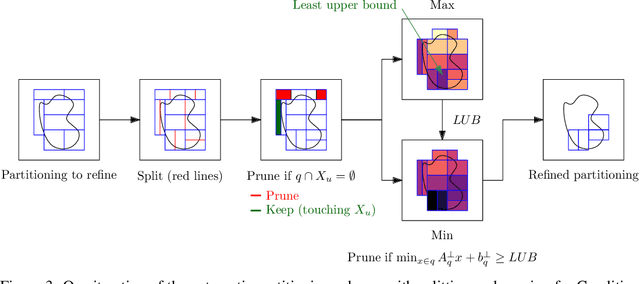
Providing non-trivial certificates of safety for non-linear stochastic systems is an important open problem that limits the wider adoption of autonomous systems in safety-critical applications. One promising solution to address this problem is barrier functions. The composition of a barrier function with a stochastic system forms a supermartingale, thus enabling the computation of the probability that the system stays in a safe set over a finite time horizon via martingale inequalities. However, existing approaches to find barrier functions for stochastic systems generally rely on convex optimization programs that restrict the search of a barrier to a small class of functions such as low degree SoS polynomials and can be computationally expensive. In this paper, we parameterize a barrier function as a neural network and show that techniques for robust training of neural networks can be successfully employed to find neural barrier functions. Specifically, we leverage bound propagation techniques to certify that a neural network satisfies the conditions to be a barrier function via linear programming and then employ the resulting bounds at training time to enforce the satisfaction of these conditions. We also present a branch-and-bound scheme that makes the certification framework scalable. We show that our approach outperforms existing methods in several case studies and often returns certificates of safety that are orders of magnitude larger.