 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable Verification of Neural Control Barrier Functions Using Linear Bound Propagation
Nov 09, 2025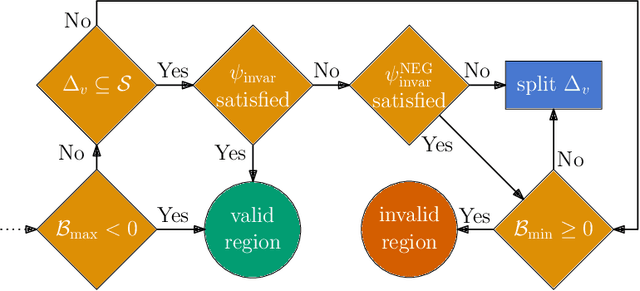
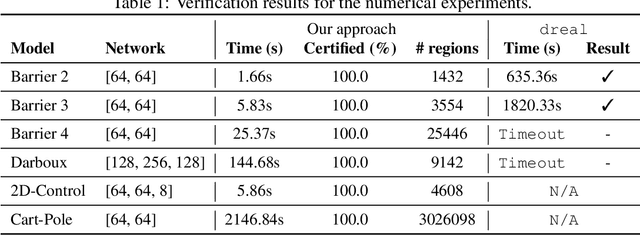
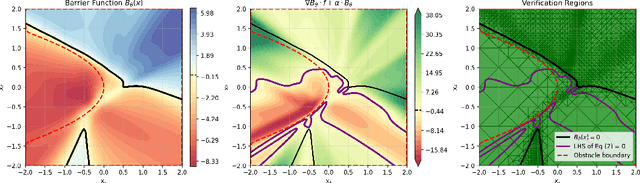
Control barrier functions (CBFs) are a popular tool for safety certification of nonlinear dynamical control systems. Recently, CBFs represented as neural networks have shown great promise due to their expressiveness and applicability to a broad class of dynamics and safety constraints. However, verifying that a trained neural network is indeed a valid CBF is a computational bottleneck that limits the size of the networks that can be used. To overcome this limitation, we present a novel framework for verifying neural CBFs based on piecewise linear upper and lower bounds on the conditions required for a neural network to be a CBF. Our approach is rooted in linear bound propagation (LBP) for neural networks, which we extend to compute bounds on the gradients of the network. Combined with McCormick relaxation, we derive linear upper and lower bounds on the CBF conditions, thereby eliminating the need for computationally expensive verification procedures. Our approach applies to arbitrary control-affine systems and a broad range of nonlinear activation functions. To reduce conservatism, we develop a parallelizable refinement strategy that adaptively refines the regions over which these bounds are computed. Our approach scales to larger neural networks than state-of-the-art verification procedures for CBFs, as demonstrated by our numerical experiments.
Certified Neural Approximations of Nonlinear Dynamics
May 21, 2025Neural networks hold great potential to act as approximate models of nonlinear dynamical systems, with the resulting neural approximations enabling verification and control of such systems. However, in safety-critical contexts, the use of neural approximations requires formal bounds on their closeness to the underlying system. To address this fundamental challenge, we propose a novel, adaptive, and parallelizable verification method based on certified first-order models. Our approach provides formal error bounds on the neural approximations of dynamical systems, allowing them to be safely employed as surrogates by interpreting the error bound as bounded disturbances acting on the approximated dynamics. We demonstrate the effectiveness and scalability of our method on a range of established benchmarks from the literature, showing that it outperforms the state-of-the-art. Furthermore, we highlight the flexibility of our framework by applying it to two novel scenarios not previously explored in this context: neural network compression and an autoencoder-based deep learning architecture for learning Koopman operators, both yielding compelling results.
SPoRt -- Safe Policy Ratio: Certified Training and Deployment of Task Policies in Model-Free RL
Apr 08, 2025To apply reinforcement learning to safety-critical applications, we ought to provide safety guarantees during both policy training and deployment. In this work we present novel theoretical results that provide a bound on the probability of violating a safety property for a new task-specific policy in a model-free, episodic setup: the bound, based on a `maximum policy ratio' that is computed with respect to a `safe' base policy, can also be more generally applied to temporally-extended properties (beyond safety) and to robust control problems. We thus present SPoRt, which also provides a data-driven approach for obtaining such a bound for the base policy, based on scenario theory, and which includes Projected PPO, a new projection-based approach for training the task-specific policy while maintaining a user-specified bound on property violation. Hence, SPoRt enables the user to trade off safety guarantees in exchange for task-specific performance. Accordingly, we present experimental results demonstrating this trade-off, as well as a comparison of the theoretical bound to posterior bounds based on empirical violation rates.
Certified Approximate Reachability (CARe): Formal Error Bounds on Deep Learning of Reachable Sets
Mar 31, 2025Recent approaches to leveraging deep learning for computing reachable sets of continuous-time dynamical systems have gained popularity over traditional level-set methods, as they overcome the curse of dimensionality. However, as with level-set methods, considerable care needs to be taken in limiting approximation errors, particularly since no guarantees are provided during training on the accuracy of the learned reachable set. To address this limitation, we introduce an epsilon-approximate Hamilton-Jacobi Partial Differential Equation (HJ-PDE), which establishes a relationship between training loss and accuracy of the true reachable set. To formally certify this approximation, we leverage Satisfiability Modulo Theories (SMT) solvers to bound the residual error of the HJ-based loss function across the domain of interest. Leveraging Counter Example Guided Inductive Synthesis (CEGIS), we close the loop around learning and verification, by fine-tuning the neural network on counterexamples found by the SMT solver, thus improving the accuracy of the learned reachable set. To the best of our knowledge, Certified Approximate Reachability (CARe) is the first approach to provide soundness guarantees on learned reachable sets of continuous dynamical systems.
Finite sample learning of moving targets
Aug 08, 2024We consider a moving target that we seek to learn from samples. Our results extend randomized techniques developed in control and optimization for a constant target to the case where the target is changing. We derive a novel bound on the number of samples that are required to construct a probably approximately correct (PAC) estimate of the target. Furthermore, when the moving target is a convex polytope, we provide a constructive method of generating the PAC estimate using a mixed integer linear program (MILP). The proposed method is demonstrated on an application to autonomous emergency braking.
Verification of safety critical control policies using kernel methods
Mar 23, 2022
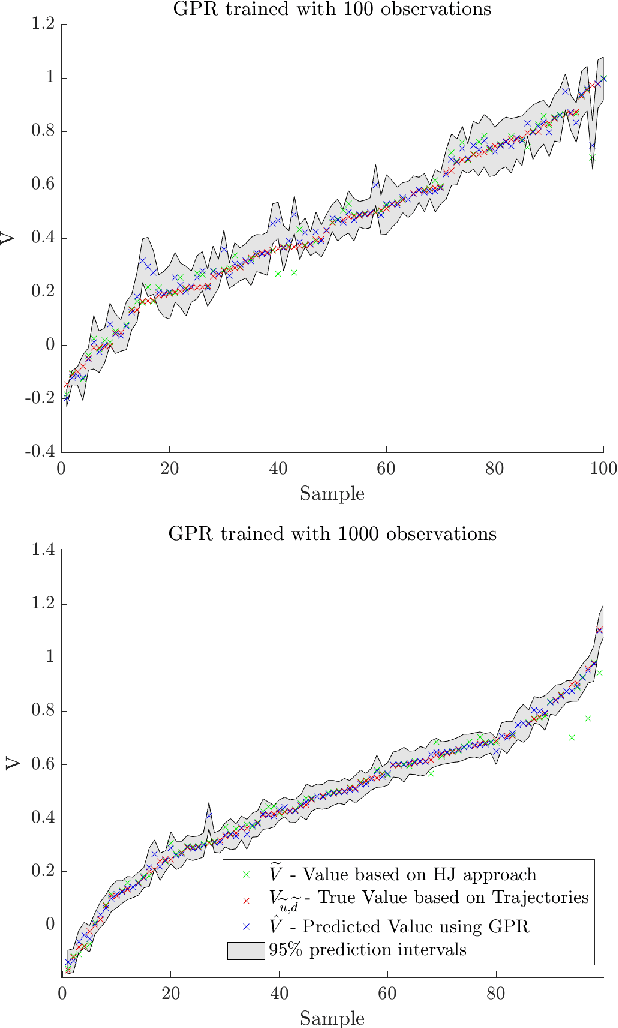
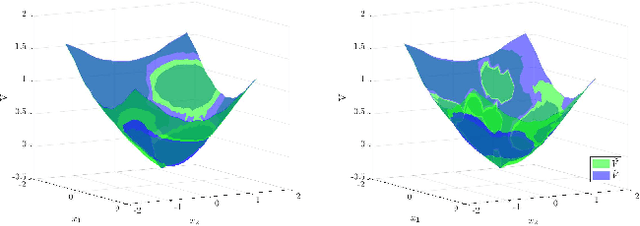
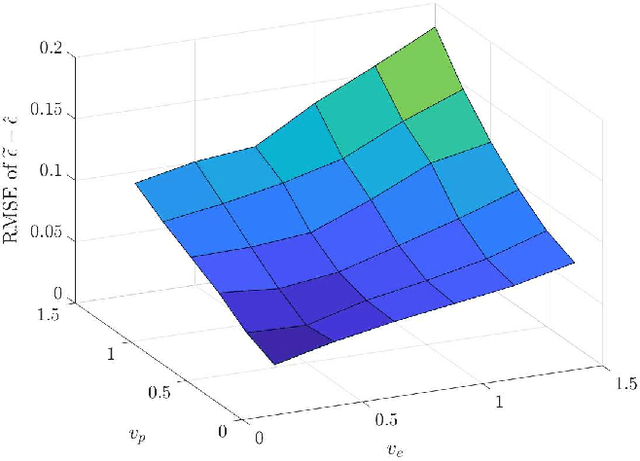
Hamilton-Jacobi reachability methods for safety-critical control have been well studied, but the safety guarantees derived rely on the accuracy of the numerical computation. Thus, it is crucial to understand and account for any inaccuracies that occur due to uncertainty in the underlying dynamics and environment as well as the induced numerical errors. To this end, we propose a framework for modeling the error of the value function inherent in Hamilton-Jacobi reachability using a Gaussian process. The derived safety controller can be used in conjuncture with arbitrary controllers to provide a safe hybrid control law. The marginal likelihood of the Gaussian process then provides a confidence metric used to determine switches between a least restrictive controller and a safety controller. We test both the prediction as well as the correction capabilities of the presented method in a classical pursuit-evasion example.