 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Singleton Obstacles to Clutter: Translation Invariant Compositional Avoid Sets
Mar 23, 2026This paper studies obstacle avoidance under translation invariant dynamics using an avoid-side travel cost Hamilton Jacobi formulation. For running costs that are zero outside an obstacle and strictly negative inside it, we prove that the value function is non-positive everywhere, equals zero exactly outside the avoid set, and is strictly negative exactly on it. Under translation invariance, this yields a reuse principle: the value of any translated obstacle is obtained by translating a single template value function. We show that the pointwise minimum of translated template values exactly characterizes the union of the translated single-obstacle avoid sets and provides a conservative inner certificate of unavoidable collision in clutter. To reduce conservatism, we introduce a blockwise composition framework in which subsets of obstacles are merged and solved jointly. This yields a hierarchy of conservative certificates from singleton reuse to the exact clutter value, together with monotonicity under block merging and an exactness criterion based on the existence of a common clutter avoiding control. The framework is illustrated on a Dubins car example in a repeated clutter field.
Early warning signals for loss of control
Dec 24, 2025Maintaining stability in feedback systems, from aircraft and autonomous robots to biological and physiological systems, relies on monitoring their behavior and continuously adjusting their inputs. Incremental damage can make such control fragile. This tends to go unnoticed until a small perturbation induces instability (i.e. loss of control). Traditional methods in the field of engineering rely on accurate system models to compute a safe set of operating instructions, which become invalid when the, possibly damaged, system diverges from its model. Here we demonstrate that the approach of such a feedback system towards instability can nonetheless be monitored through dynamical indicators of resilience. This holistic system safety monitor does not rely on a system model and is based on the generic phenomenon of critical slowing down, shown to occur in the climate, biology and other complex nonlinear systems approaching criticality. Our findings for engineered devices opens up a wide range of applications involving real-time early warning systems as well as an empirical guidance of resilient system design exploration, or "tinkering". While we demonstrate the validity using drones, the generic nature of the underlying principles suggest that these indicators could apply across a wider class of controlled systems including reactors, aircraft, and self-driving cars.
Certified Approximate Reachability (CARe): Formal Error Bounds on Deep Learning of Reachable Sets
Mar 31, 2025Recent approaches to leveraging deep learning for computing reachable sets of continuous-time dynamical systems have gained popularity over traditional level-set methods, as they overcome the curse of dimensionality. However, as with level-set methods, considerable care needs to be taken in limiting approximation errors, particularly since no guarantees are provided during training on the accuracy of the learned reachable set. To address this limitation, we introduce an epsilon-approximate Hamilton-Jacobi Partial Differential Equation (HJ-PDE), which establishes a relationship between training loss and accuracy of the true reachable set. To formally certify this approximation, we leverage Satisfiability Modulo Theories (SMT) solvers to bound the residual error of the HJ-based loss function across the domain of interest. Leveraging Counter Example Guided Inductive Synthesis (CEGIS), we close the loop around learning and verification, by fine-tuning the neural network on counterexamples found by the SMT solver, thus improving the accuracy of the learned reachable set. To the best of our knowledge, Certified Approximate Reachability (CARe) is the first approach to provide soundness guarantees on learned reachable sets of continuous dynamical systems.
A novel metric for detecting quadrotor loss-of-control
Aug 12, 2024



Unmanned aerial vehicles (UAVs) are becoming an integral part of both industry and society. In particular, the quadrotor is now invaluable across a plethora of fields and recent developments, such as the inclusion of aerial manipulators, only extends their versatility. As UAVs become more widespread, preventing loss-of-control (LOC) is an ever growing concern. Unfortunately, LOC is not clearly defined for quadrotors, or indeed, many other autonomous systems. Moreover, any existing definitions are often incomplete and restrictive. A novel metric, based on actuator capabilities, is introduced to detect LOC in quadrotors. The potential of this metric for LOC detection is demonstrated through both simulated and real quadrotor flight data. It is able to detect LOC induced by actuator faults without explicit knowledge of the occurrence and nature of the failure. The proposed metric is also sensitive enough to detect LOC in more nuanced cases, where the quadrotor remains undamaged but nevertheless losses control through an aggressive yawing manoeuvre. As the metric depends only on system and actuator models, it is sufficiently general to be applied to other systems.
* Presented at the International Conference on Robotics and Automation (ICRA) 2024 in Yokohama, Japan
User Identification across Social Networking Sites using User Profiles and Posting Patterns
Jun 22, 2021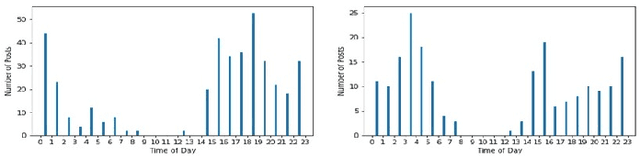
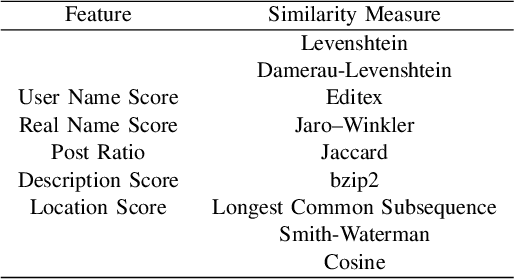

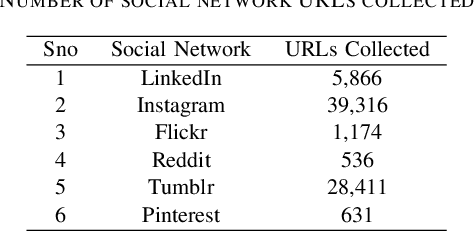
With the prevalence of online social networking sites (OSNs) and mobile devices, people are increasingly reliant on a variety of OSNs for keeping in touch with family and friends, and using it as a source of information. For example, a user might utilise multiple OSNs for different purposes, such as using Flickr to share holiday pictures with family and friends, and Twitter to post short messages about their thoughts. Identifying the same user across multiple OSNs is an important task as this allows us to understand the usage patterns of users among different OSNs, make recommendations when a user registers for a new OSN, and various other useful applications. To address this problem, we proposed an algorithm based on the multilayer perceptron using various types of features, namely: (i) user profile, such as name, location, description; (ii) temporal distribution of user generated content; and (iii) embedding based on user name, real name and description. Using a Twitter and Flickr dataset of users and their posting activities, we perform an empirical study on how these features affect the performance of user identification across the two OSNs and discuss our main findings based on the different features.