 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCertified Approximate Reachability (CARe): Formal Error Bounds on Deep Learning of Reachable Sets
Mar 31, 2025Recent approaches to leveraging deep learning for computing reachable sets of continuous-time dynamical systems have gained popularity over traditional level-set methods, as they overcome the curse of dimensionality. However, as with level-set methods, considerable care needs to be taken in limiting approximation errors, particularly since no guarantees are provided during training on the accuracy of the learned reachable set. To address this limitation, we introduce an epsilon-approximate Hamilton-Jacobi Partial Differential Equation (HJ-PDE), which establishes a relationship between training loss and accuracy of the true reachable set. To formally certify this approximation, we leverage Satisfiability Modulo Theories (SMT) solvers to bound the residual error of the HJ-based loss function across the domain of interest. Leveraging Counter Example Guided Inductive Synthesis (CEGIS), we close the loop around learning and verification, by fine-tuning the neural network on counterexamples found by the SMT solver, thus improving the accuracy of the learned reachable set. To the best of our knowledge, Certified Approximate Reachability (CARe) is the first approach to provide soundness guarantees on learned reachable sets of continuous dynamical systems.
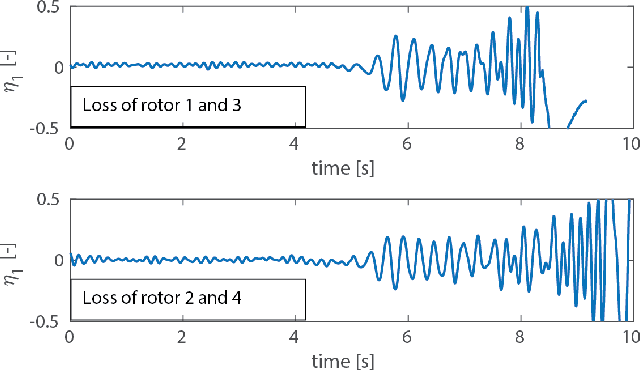
A novel metric for detecting quadrotor loss-of-control
Aug 12, 2024



Unmanned aerial vehicles (UAVs) are becoming an integral part of both industry and society. In particular, the quadrotor is now invaluable across a plethora of fields and recent developments, such as the inclusion of aerial manipulators, only extends their versatility. As UAVs become more widespread, preventing loss-of-control (LOC) is an ever growing concern. Unfortunately, LOC is not clearly defined for quadrotors, or indeed, many other autonomous systems. Moreover, any existing definitions are often incomplete and restrictive. A novel metric, based on actuator capabilities, is introduced to detect LOC in quadrotors. The potential of this metric for LOC detection is demonstrated through both simulated and real quadrotor flight data. It is able to detect LOC induced by actuator faults without explicit knowledge of the occurrence and nature of the failure. The proposed metric is also sensitive enough to detect LOC in more nuanced cases, where the quadrotor remains undamaged but nevertheless losses control through an aggressive yawing manoeuvre. As the metric depends only on system and actuator models, it is sufficiently general to be applied to other systems.
* Presented at the International Conference on Robotics and Automation (ICRA) 2024 in Yokohama, Japan
Peaking into the Black-box: Prediction Intervals Give Insight into Data-driven Quadrotor Model Reliability
Aug 12, 2024Ensuring the reliability and validity of data-driven quadrotor model predictions is essential for their accepted and practical use. This is especially true for grey- and black-box models wherein the mapping of inputs to predictions is not transparent and subsequent reliability notoriously difficult to ascertain. Nonetheless, such techniques are frequently and successfully used to identify quadrotor models. Prediction intervals (PIs) may be employed to provide insight into the consistency and accuracy of model predictions. This paper estimates such PIs for polynomial and Artificial Neural Network (ANN) quadrotor aerodynamic models. Two existing ANN PI estimation techniques - the bootstrap method and the quality driven method - are validated numerically for quadrotor aerodynamic models using an existing high-fidelity quadrotor simulation. Quadrotor aerodynamic models are then identified on real quadrotor flight data to demonstrate their utility and explore their sensitivity to model interpolation and extrapolation. It is found that the ANN-based PIs widen considerably when extrapolating and remain constant, or shrink, when interpolating. While this behaviour also occurs for the polynomial PIs, it is of lower magnitude. The estimated PIs establish probabilistic bounds within which the quadrotor model outputs will likely lie, subject to modelling and measurement uncertainties that are reflected through the PI widths.
* Presented at AIAA SciTech Forum 2023 in National Harbor, MD, USA
Autonomous Quadrotor Flight despite Rotor Failure with Onboard Vision Sensors: Frames vs. Events
Feb 26, 2021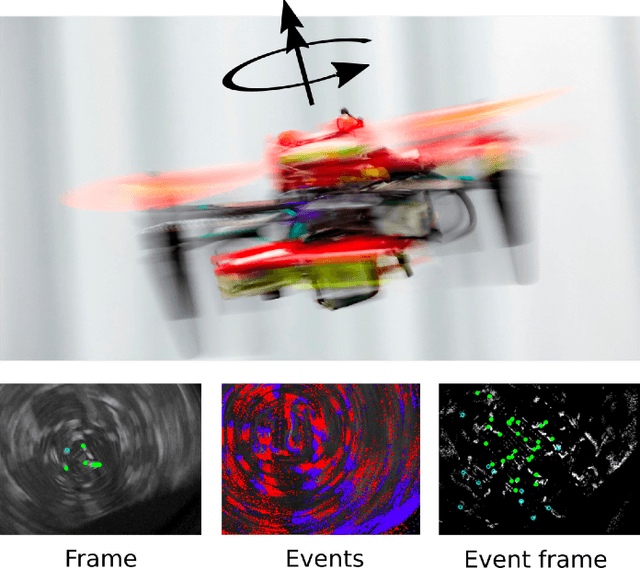
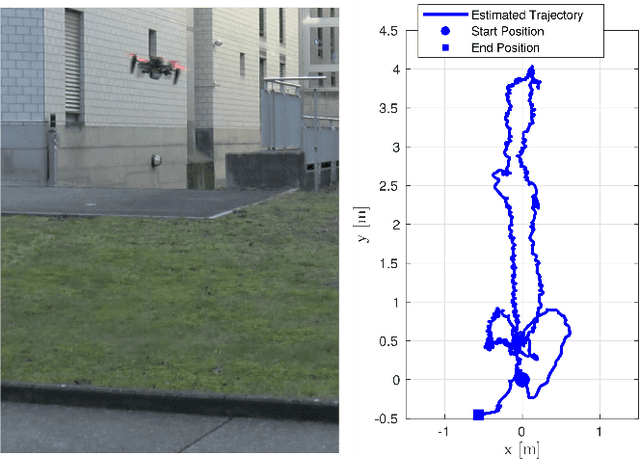
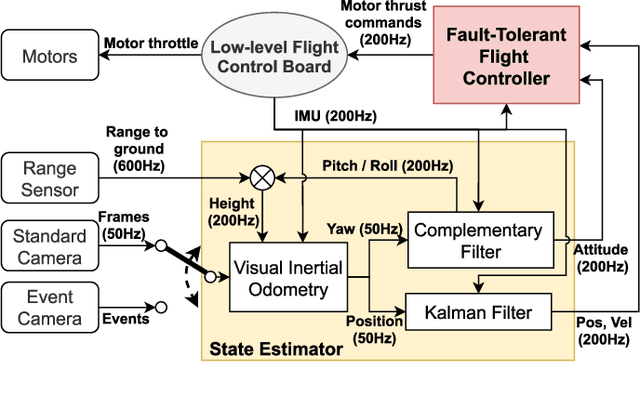
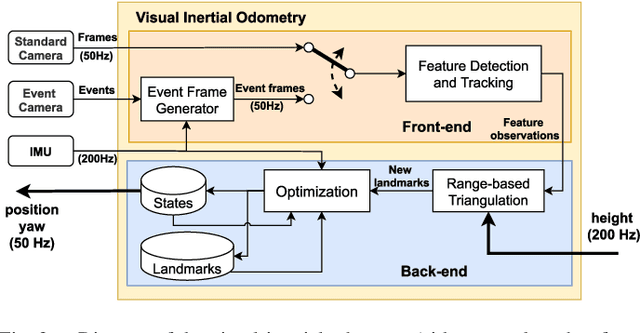
Fault-tolerant control is crucial for safety-critical systems, such as quadrotors. State-of-art flight controllers can stabilize and control a quadrotor even when subjected to the complete loss of a rotor. However, these methods rely on external sensors, such as GPS or motion capture systems, for state estimation. To the best of our knowledge, this has not yet been achieved with only onboard sensors. In this paper, we propose the first algorithm that combines fault-tolerant control and onboard vision-based state estimation to achieve position control of a quadrotor subjected to complete failure of one rotor. Experimental validations show that our approach is able to accurately control the position of a quadrotor during a motor failure scenario, without the aid of any external sensors. The primary challenge to vision-based state estimation stems from the inevitable high-speed yaw rotation (over 20 rad/s) of the damaged quadrotor, causing motion blur to cameras, which is detrimental to visual inertial odometry (VIO). We compare two types of visual inputs to the vision-based state estimation algorithm: standard frames and events. Experimental results show the advantage of using an event camera especially in low light environments due to its inherent high dynamic range and high temporal resolution. We believe that our approach will render autonomous quadrotors safer in both GPS denied or degraded environments. We release both our controller and VIO algorithm open source.
* 8 pages, 10 figures
Fast Fault Detection on a Quadrotor using Onboard Sensors and a Kalman Filter Approach
Feb 12, 2021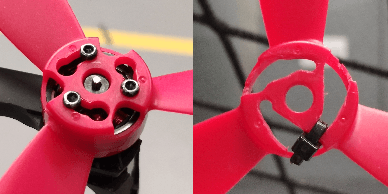
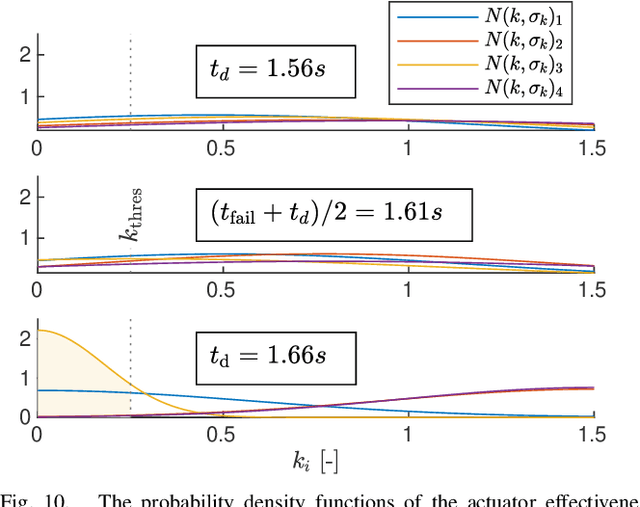
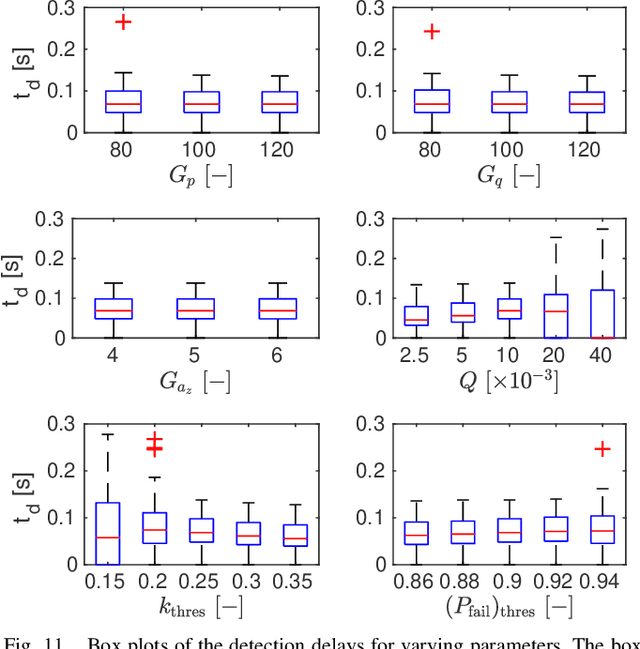
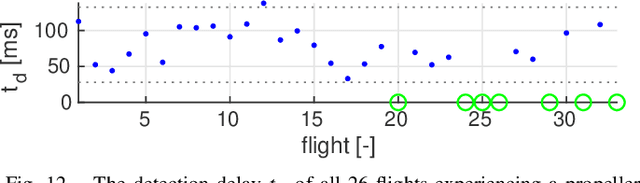
This paper presents a novel method for fast and robust detection of actuator failures on quadrotors. The proposed algorithm has very little model dependency. A Kalman filter estimator estimates a stochastic effectiveness factor for every actuator, using only onboard RPM, gyro and accelerometer measurements. Then, a hypothesis test identifies the failed actuator. This algorithm is validated online in real-time, also as part of an active fault tolerant control system. Loss of actuator effectiveness is induced by ejecting the propellers from the motors. The robustness of this algorithm is further investigated offline over a range of parameter settings by replaying real flight data containing 26 propeller ejections. The detection delays are found to be in the 30 to 130 ms range, without missed detections or false alarms occurring.
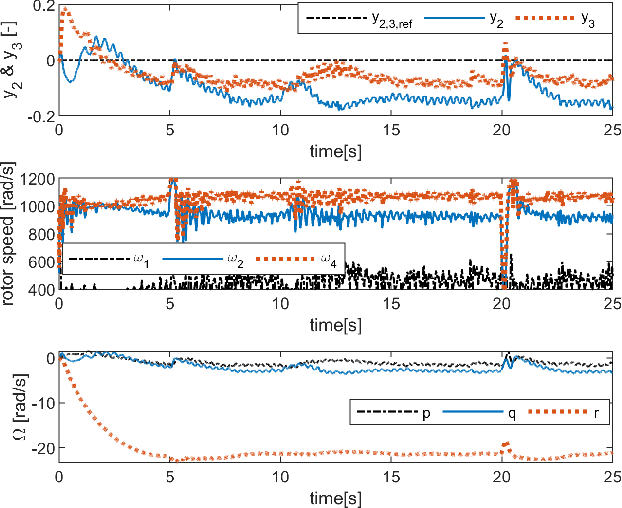
Upset Recovery Control for Quadrotors Subjected to a Complete Rotor Failure from Large Initial Disturbances
Feb 21, 2020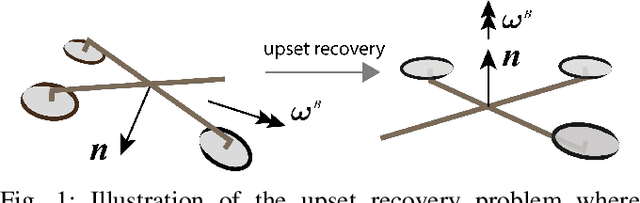
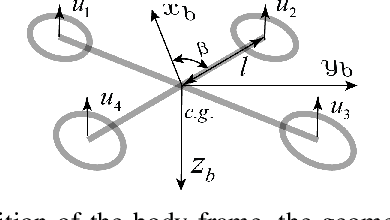
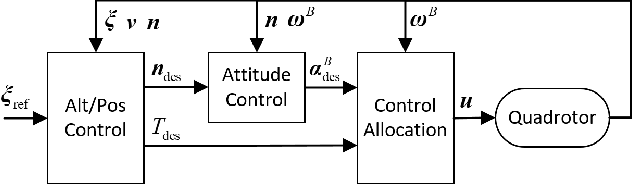

This study has developed a fault-tolerant controller that is able to recover a quadrotor from arbitrary initial orientations and angular velocities, despite the complete failure of a rotor. This cascaded control method includes a position/altitude controller, an almost-global convergence attitude controller, and a control allocation method based on quadratic programming. As a major novelty, a constraint of undesirable angular velocity is derived and fused into the control allocator, which significantly improves the recovery performance. For validation, we have conducted a set of Monte-Carlo simulation to test the reliability of the proposed method of recovering the quadrotor from arbitrary initial attitude/rate conditions. In addition, real-life flight tests have been performed. The results demonstrate that the post-failure quadrotor can recover after being casually tossed into the air.
Incremental Nonlinear Fault-Tolerant Control of a Quadrotor with Complete Loss of Two Opposing Rotors
Feb 18, 2020

In order to further expand the flight envelope of quadrotors under actuator failures, we design a nonlinear sensor-based fault-tolerant controller to stabilize a quadrotor with failure of two opposing rotors in the high-speed flight condition (> 8m/s). The incremental nonlinear dynamic inversion (INDI) approach which excels in handling model uncertainties is adopted to compensate for the significant unknown aerodynamic effects. The internal dynamics of such an underactuated system have been analyzed, and subsequently stabilized by re-defining the control output. The proposed method can be generalized to control a quadrotor under single-rotor-failure and nominal conditions. For validation, flight tests have been carried out in a large-scale open jet wind tunnel. The position of a damaged quadrotor can be controlled in the presence of significant wind disturbances. A linear quadratic regulator (LQR) approach from the literature has been compared to demonstrate the advantages of the proposed nonlinear method in the windy and high-speed flight condition.
On Approximate Dynamic Programming with Multivariate Splines for Adaptive Control
Jun 30, 2016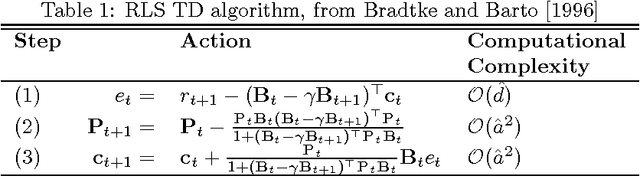
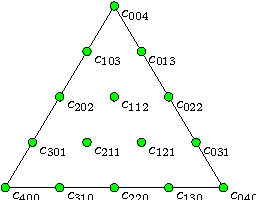
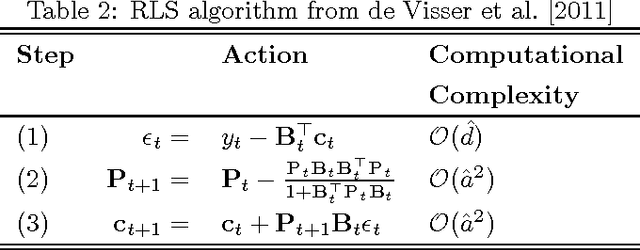
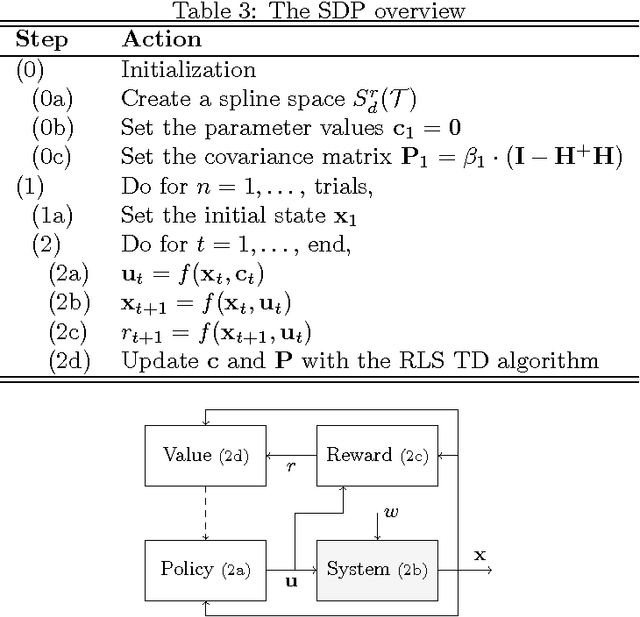
We define a SDP framework based on the RLSTD algorithm and multivariate simplex B-splines. We introduce a local forget factor capable of preserving the continuity of the simplex splines. This local forget factor is integrated with the RLSTD algorithm, resulting in a modified RLSTD algorithm that is capable of tracking time-varying systems. We present the results of two numerical experiments, one validating SDP and comparing it with NDP and another to show the advantages of the modified RLSTD algorithm over the original. While SDP requires more computations per time-step, the experiment shows that for the same amount of function approximator parameters, there is an increase in performance in terms of stability and learning rate compared to NDP. The second experiment shows that SDP in combination with the modified RLSTD algorithm allows for faster recovery compared to the original RLSTD algorithm when system parameters are altered, paving the way for an adaptive high-performance non-linear control method.