 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMPC-Guided Safe Reinforcement Learning and Lipschitz-Based Filtering for Structured Nonlinear Systems
Dec 14, 2025



Modern engineering systems, such as autonomous vehicles, flexible robotics, and intelligent aerospace platforms, require controllers that are robust to uncertainties, adaptive to environmental changes, and safety-aware under real-time constraints. RL offers powerful data-driven adaptability for systems with nonlinear dynamics that interact with uncertain environments. RL, however, lacks built-in mechanisms for dynamic constraint satisfaction during exploration. MPC offers structured constraint handling and robustness, but its reliance on accurate models and computationally demanding online optimization may pose significant challenges. This paper proposes an integrated MPC-RL framework that combines stability and safety guarantees of MPC with the adaptability of RL. During training, MPC defines safe control bounds that guide the RL component and that enable constraint-aware policy learning. At deployment, the learned policy operates in real time with a lightweight safety filter based on Lipschitz continuity to ensure constraint satisfaction without heavy online optimizations. The approach, which is validated on a nonlinear aeroelastic wing system, demonstrates improved disturbance rejection, reduced actuator effort, and robust performance under turbulence. The architecture generalizes to other domains with structured nonlinearities and bounded disturbances, offering a scalable solution for safe artificial-intelligence-driven control in engineering applications.
Agile and Cooperative Aerial Manipulation of a Cable-Suspended Load
Jan 30, 2025



Quadrotors can carry slung loads to hard-to-reach locations at high speed. Since a single quadrotor has limited payload capacities, using a team of quadrotors to collaboratively manipulate a heavy object is a scalable and promising solution. However, existing control algorithms for multi-lifting systems only enable low-speed and low-acceleration operations due to the complex dynamic coupling between quadrotors and the load, limiting their use in time-critical missions such as search and rescue. In this work, we present a solution to significantly enhance the agility of cable-suspended multi-lifting systems. Unlike traditional cascaded solutions, we introduce a trajectory-based framework that solves the whole-body kinodynamic motion planning problem online, accounting for the dynamic coupling effects and constraints between the quadrotors and the load. The planned trajectory is provided to the quadrotors as a reference in a receding-horizon fashion and is tracked by an onboard controller that observes and compensates for the cable tension. Real-world experiments demonstrate that our framework can achieve at least eight times greater acceleration than state-of-the-art methods to follow agile trajectories. Our method can even perform complex maneuvers such as flying through narrow passages at high speed. Additionally, it exhibits high robustness against load uncertainties and does not require adding any sensors to the load, demonstrating strong practicality.
Incremental Nonlinear Fault-Tolerant Control of a Quadrotor with Complete Loss of Two Opposing Rotors
Feb 18, 2020
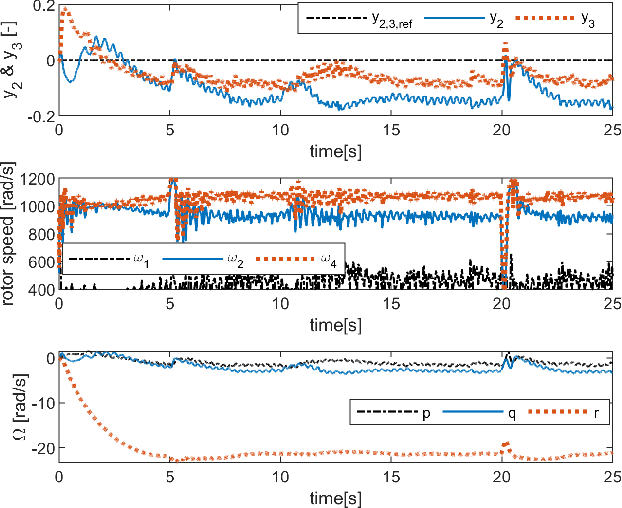
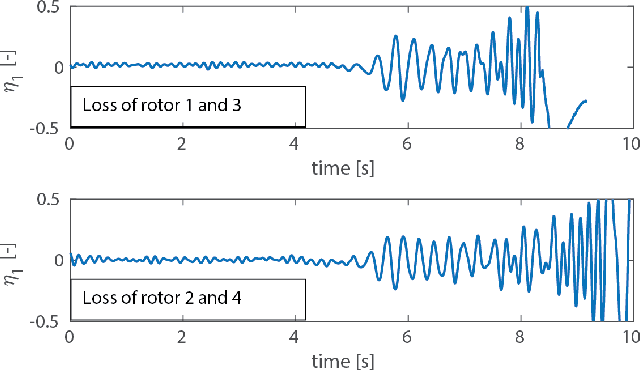

In order to further expand the flight envelope of quadrotors under actuator failures, we design a nonlinear sensor-based fault-tolerant controller to stabilize a quadrotor with failure of two opposing rotors in the high-speed flight condition (> 8m/s). The incremental nonlinear dynamic inversion (INDI) approach which excels in handling model uncertainties is adopted to compensate for the significant unknown aerodynamic effects. The internal dynamics of such an underactuated system have been analyzed, and subsequently stabilized by re-defining the control output. The proposed method can be generalized to control a quadrotor under single-rotor-failure and nominal conditions. For validation, flight tests have been carried out in a large-scale open jet wind tunnel. The position of a damaged quadrotor can be controlled in the presence of significant wind disturbances. A linear quadratic regulator (LQR) approach from the literature has been compared to demonstrate the advantages of the proposed nonlinear method in the windy and high-speed flight condition.