 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Effect of Haptic Guidance during Robotic-assisted Motor Training is Modulated by Personality Traits
Feb 09, 2024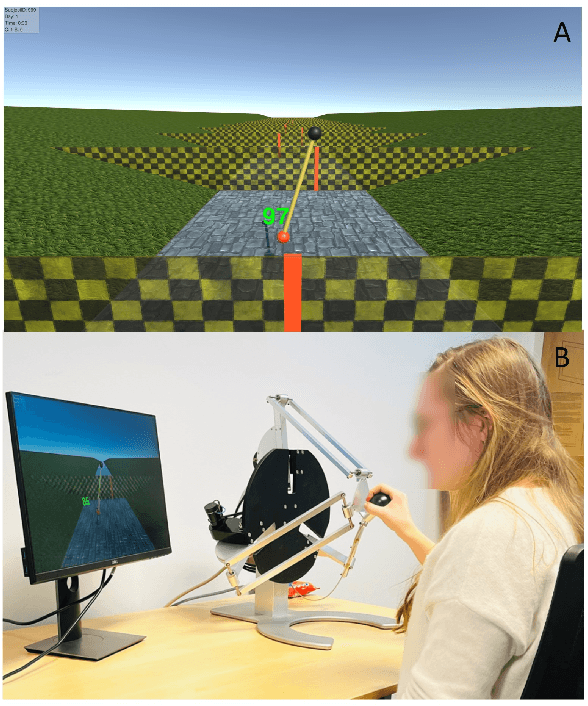
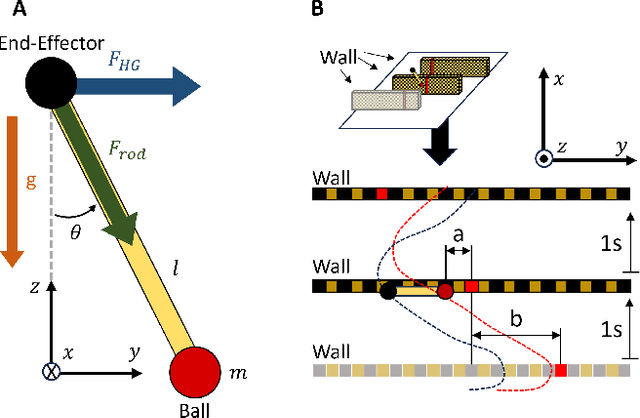
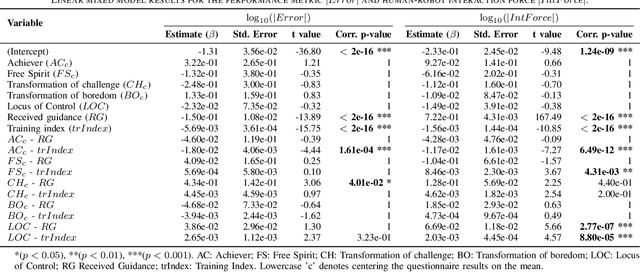
The provision of robotic assistance during motor training has proven to be effective in enhancing motor learning in some healthy trainee groups as well as patients. Personalizing such robotic assistance can help further improve motor (re)learning outcomes and cater better to the trainee's needs and desires. However, the development of personalized haptic assistance is hindered by the lack of understanding of the link between the trainee's personality and the effects of haptic guidance during human-robot interaction. To address this gap, we ran an experiment with 42 healthy participants who trained with a robotic device to control a virtual pendulum to hit incoming targets either with or without haptic guidance. We found that certain personal traits affected how users adapt and interact with the guidance during training. In particular, those participants with an 'Achiever gaming style' performed better and applied lower interaction forces to the robotic device than the average participant as the training progressed. Conversely, participants with the 'Free spirit game style' increased the interaction force in the course of training. We also found an interaction between some personal characteristics and haptic guidance. Specifically, participants with a higher 'Transformation of challenge' trait exhibited poorer performance during training while receiving haptic guidance compared to an average participant receiving haptic guidance. Furthermore, individuals with an external Locus of Control tended to increase their interaction force with the device, deviating from the pattern observed in an average participant under the same guidance. These findings suggest that individual characteristics may play a crucial role in the effectiveness of haptic guidance training strategies.