 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTherapist-Robot-Patient Physical Interaction is Worth a Thousand Words: Enabling Intuitive Therapist Guidance via Remote Haptic Control
Feb 25, 2026Robotic systems can enhance the amount and repeatability of physically guided motor training. Yet their real-world adoption is limited, partly due to non-intuitive trainer/therapist-trainee/patient interactions. To address this gap, we present a haptic teleoperation system for trainers to remotely guide and monitor the movements of a trainee wearing an arm exoskeleton. The trainer can physically interact with the exoskeleton through a commercial handheld haptic device via virtual contact points at the exoskeleton's elbow and wrist, allowing intuitive guidance. Thirty-two participants tested the system in a trainer-trainee paradigm, comparing our haptic demonstration system with conventional visual demonstration in guiding trainees in executing arm poses. Quantitative analyses showed that haptic demonstration significantly reduced movement completion time and improved smoothness, while speech analysis using large language models for automated transcription and categorization of verbal commands revealed fewer verbal instructions. The haptic demonstration did not result in higher reported mental and physical effort by trainers compared to the visual demonstration, while trainers reported greater competence and trainees lower physical demand. These findings support the feasibility of our proposed interface for effective remote human-robot physical interaction. Future work should assess its usability and efficacy for clinical populations in restoring clinicians' sense of agency during robot-assisted therapy.
Personalized Gait Patterns During Exoskeleton-Aided Training May Have Minimal Effect on User Experience. Insights from a Pilot Study
Dec 19, 2025



Robot-aided gait rehabilitation facilitates high-intensity and repeatable therapy. However, most exoskeletons rely on pre-recorded, non-personalized gait trajectories constrained to the sagittal plane, potentially limiting movement naturalness and user comfort. We present a data-driven gait personalization framework for an exoskeleton that supports multi-planar motion, including hip abduction/adduction and pelvic translation and rotation. Personalized trajectories to individual participants were generated using regression models trained on anthropometric, demographic, and walking speed data from a normative database. In a within-subject experiment involving ten unimpaired participants, these personalized trajectories were evaluated in regard to comfort, naturalness, and overall experience and compared against two standard patterns from the same database: one averaging all the trajectories, and one randomly selected. We did not find relevant differences across pattern conditions, despite all trajectories being executed with high accuracy thanks to a stiff position-derivative controller. We found, however, that pattern conditions in later trials were rated as more comfortable and natural than those in the first trial, suggesting that participants might have adapted to walking within the exoskeleton, regardless of the enforced gait pattern. Our findings highlight the importance of integrating subjective feedback when designing personalized gait controllers and accounting for user adaptation during experimentation.
A Passive Mechanical Add-on for Treadmill Exercise (P-MATE) in Stroke Rehabilitation
Jan 06, 2025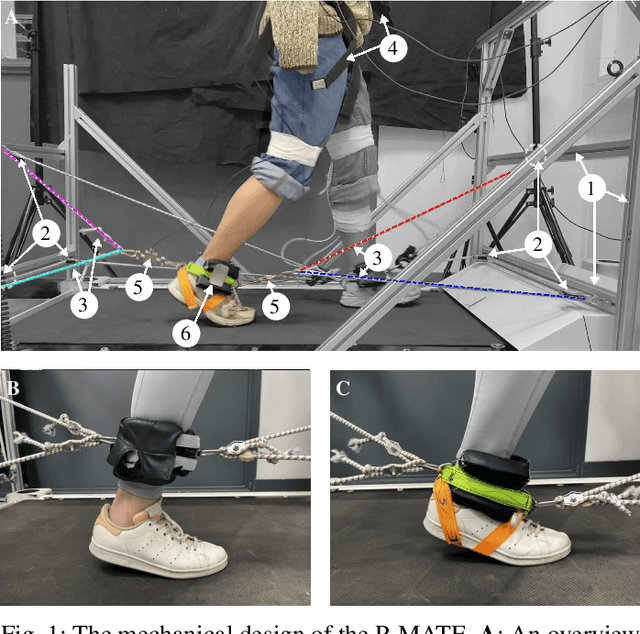
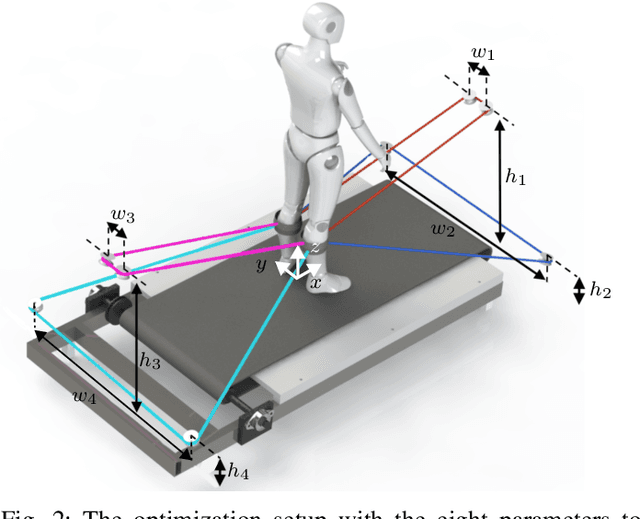
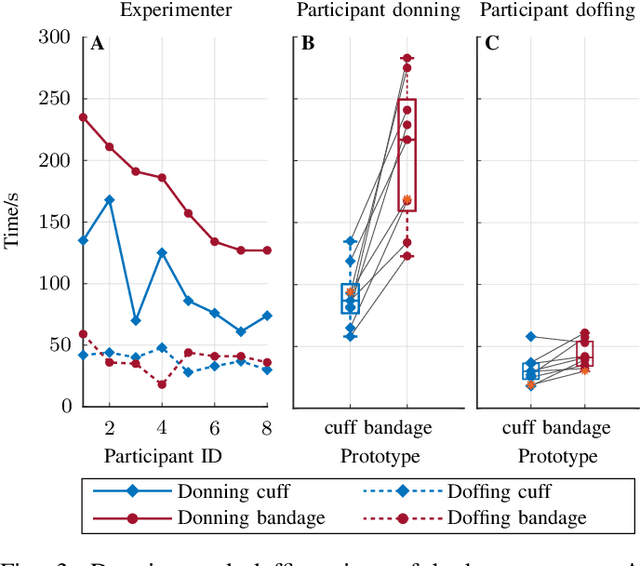
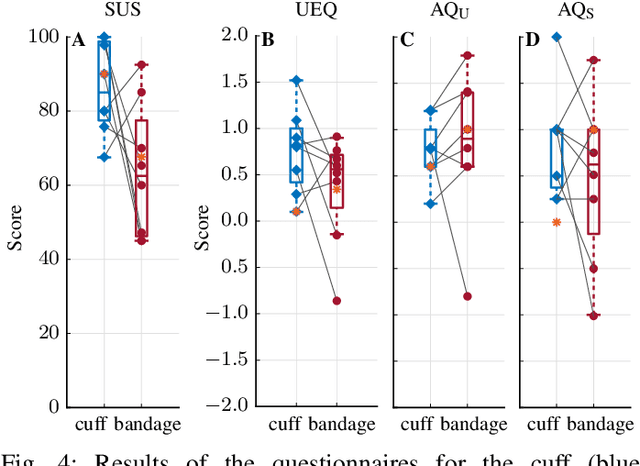
Robotic rehabilitation can deliver high-dose gait therapy and improve motor function after a stroke. However, for many devices, high costs and lengthy setup times limit clinical adoption. Thus, we designed, built, and evaluated the Passive Mechanical Add-on for Treadmill Exercise (P-MATE), a low-cost passive end-effector add-on for treadmills that couples the movement of the paretic and non-paretic legs via a reciprocating system of elastic cables and pulleys. Two human-device mechanical interfaces were designed to attach the elastic cables to the user. The P-MATE and two interface prototypes were tested with a physical therapist and eight unimpaired participants. Biomechanical data, including kinematics and interaction forces, were collected alongside standardized questionnaires to assess usability and user experience. Both interfaces were quick and easy to attach, though user experience differed, highlighting the need for personalization. We also identified areas for future improvement, including pretension adjustments, tendon derailing prevention, and understanding long-term impacts on user gait. Our preliminary findings underline the potential of the P-MATE to provide effective, accessible, and sustainable stroke gait rehabilitation.
Tactile Weight Rendering: A Review for Researchers and Developers
Feb 20, 2024Haptic rendering of weight plays an essential role in naturalistic object interaction in virtual environments. While kinesthetic devices have traditionally been used for this aim by applying forces on the limbs, tactile interfaces acting on the skin have recently offered potential solutions to enhance or substitute kinesthetic ones. Here, we aim to provide an in-depth overview and comparison of existing tactile weight rendering approaches. We categorized these approaches based on their type of stimulation into asymmetric vibration and skin stretch, further divided according to the working mechanism of the devices. Then, we compared these approaches using various criteria, including physical, mechanical, and perceptual characteristics of the reported devices and their potential applications. We found that asymmetric vibration devices have the smallest form factor, while skin stretch devices relying on the motion of flat surfaces, belts, or tactors present numerous mechanical and perceptual advantages for scenarios requiring more accurate weight rendering. Finally, we discussed the selection of the proposed categorization of devices and their application scopes, together with the limitations and opportunities for future research. We hope this study guides the development and use of tactile interfaces to achieve a more naturalistic object interaction and manipulation in virtual environments.
Design and evaluation of a multi-finger skin-stretch tactile interface for hand rehabilitation robots
Feb 19, 2024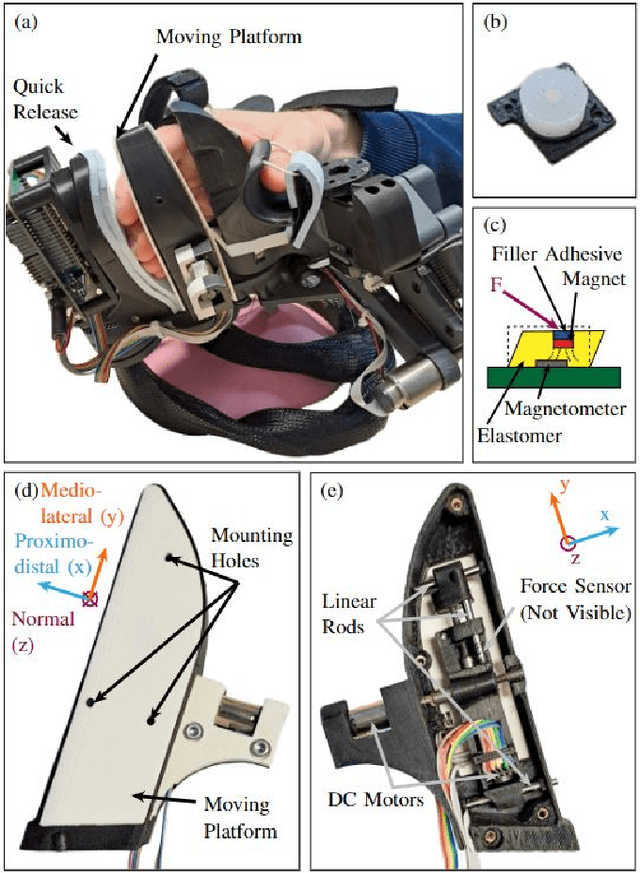
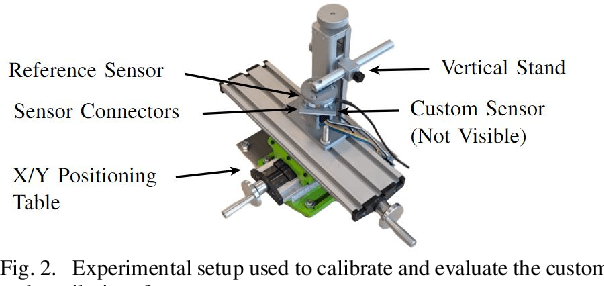
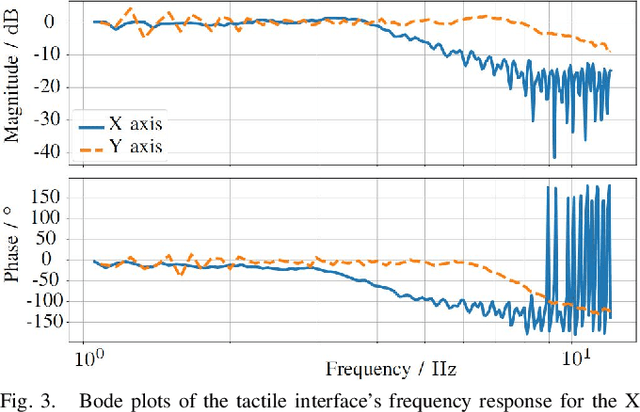
Object properties perceived through the tactile sense, such as weight, friction, and slip, greatly influence motor control during manipulation tasks. However, the provision of tactile information during robotic training in neurorehabilitation has not been well explored. Therefore, we designed and evaluated a tactile interface based on a two-degrees-of-freedom moving platform mounted on a hand rehabilitation robot that provides skin stretch at four fingertips, from the index through the little finger. To accurately control the rendered forces, we included a custom magnetic-based force sensor to control the tactile interface in a closed loop. The technical evaluation showed that our custom force sensor achieved measurable shear forces of +-8N with accuracies of 95.2-98.4% influenced by hysteresis, viscoelastic creep, and torsional deformation. The tactile interface accurately rendered forces with a step response steady-state accuracy of 97.5-99.4% and a frequency response in the range of most activities of daily living. Our sensor showed the highest measurement-range-to-size ratio and comparable accuracy to sensors of its kind. These characteristics enabled the closed-loop force control of the tactile interface for precise rendering of multi-finger two-dimensional skin stretch. The proposed system is a first step towards more realistic and rich haptic feedback during robotic sensorimotor rehabilitation, potentially improving therapy outcomes.
The Effect of Haptic Guidance during Robotic-assisted Motor Training is Modulated by Personality Traits
Feb 09, 2024
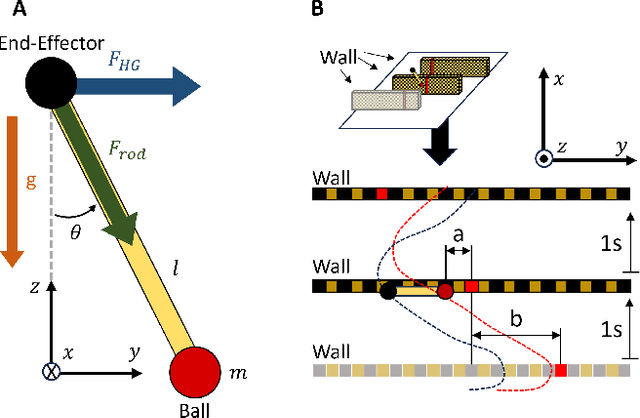
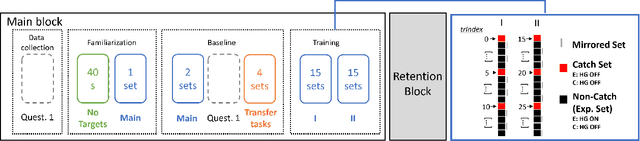
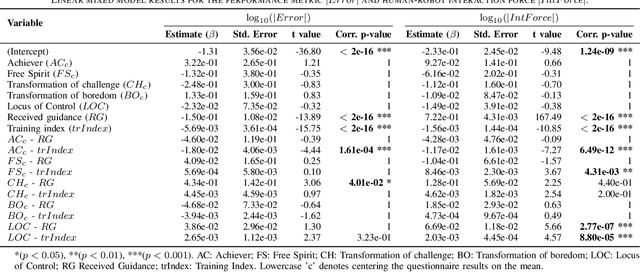
The provision of robotic assistance during motor training has proven to be effective in enhancing motor learning in some healthy trainee groups as well as patients. Personalizing such robotic assistance can help further improve motor (re)learning outcomes and cater better to the trainee's needs and desires. However, the development of personalized haptic assistance is hindered by the lack of understanding of the link between the trainee's personality and the effects of haptic guidance during human-robot interaction. To address this gap, we ran an experiment with 42 healthy participants who trained with a robotic device to control a virtual pendulum to hit incoming targets either with or without haptic guidance. We found that certain personal traits affected how users adapt and interact with the guidance during training. In particular, those participants with an 'Achiever gaming style' performed better and applied lower interaction forces to the robotic device than the average participant as the training progressed. Conversely, participants with the 'Free spirit game style' increased the interaction force in the course of training. We also found an interaction between some personal characteristics and haptic guidance. Specifically, participants with a higher 'Transformation of challenge' trait exhibited poorer performance during training while receiving haptic guidance compared to an average participant receiving haptic guidance. Furthermore, individuals with an external Locus of Control tended to increase their interaction force with the device, deviating from the pattern observed in an average participant under the same guidance. These findings suggest that individual characteristics may play a crucial role in the effectiveness of haptic guidance training strategies.