 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and evaluation of a multi-finger skin-stretch tactile interface for hand rehabilitation robots
Feb 19, 2024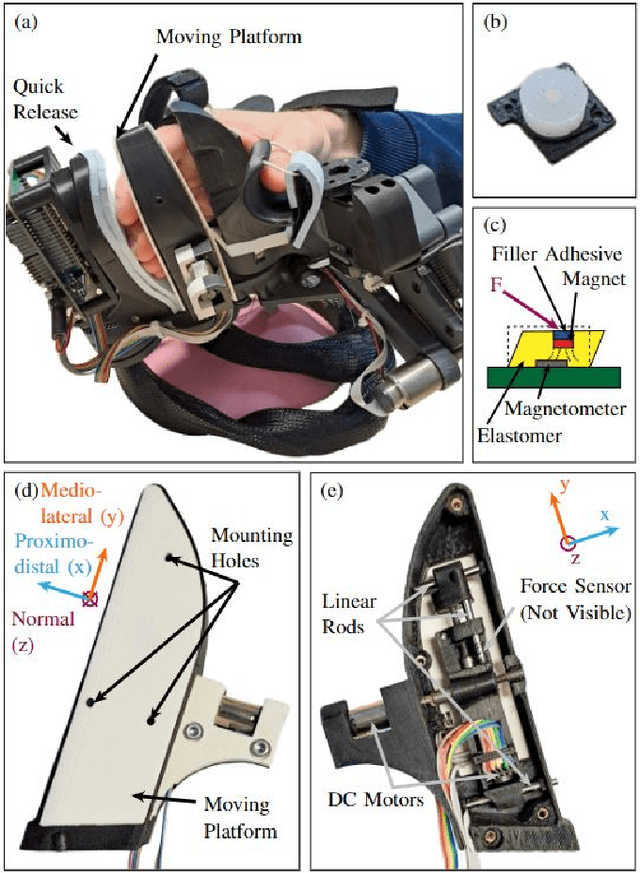
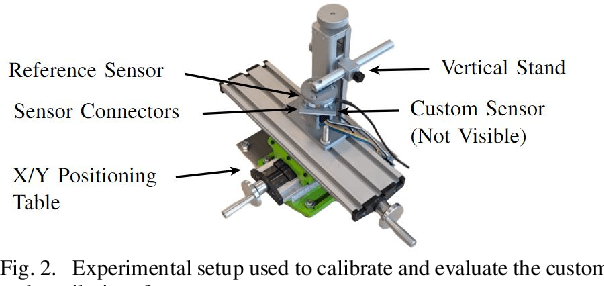
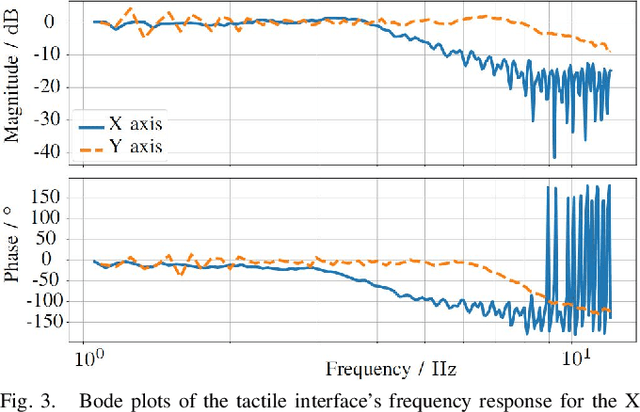
Object properties perceived through the tactile sense, such as weight, friction, and slip, greatly influence motor control during manipulation tasks. However, the provision of tactile information during robotic training in neurorehabilitation has not been well explored. Therefore, we designed and evaluated a tactile interface based on a two-degrees-of-freedom moving platform mounted on a hand rehabilitation robot that provides skin stretch at four fingertips, from the index through the little finger. To accurately control the rendered forces, we included a custom magnetic-based force sensor to control the tactile interface in a closed loop. The technical evaluation showed that our custom force sensor achieved measurable shear forces of +-8N with accuracies of 95.2-98.4% influenced by hysteresis, viscoelastic creep, and torsional deformation. The tactile interface accurately rendered forces with a step response steady-state accuracy of 97.5-99.4% and a frequency response in the range of most activities of daily living. Our sensor showed the highest measurement-range-to-size ratio and comparable accuracy to sensors of its kind. These characteristics enabled the closed-loop force control of the tactile interface for precise rendering of multi-finger two-dimensional skin stretch. The proposed system is a first step towards more realistic and rich haptic feedback during robotic sensorimotor rehabilitation, potentially improving therapy outcomes.