 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCTS-CBS: A New Approach for Multi-Agent Collaborative Task Sequencing and Path Finding
Mar 26, 2025This paper addresses a generalization problem of Multi-Agent Pathfinding (MAPF), called Collaborative Task Sequencing - Multi-Agent Pathfinding (CTS-MAPF), where agents must plan collision-free paths and visit a series of intermediate task locations in a specific order before reaching their final destinations. To address this problem, we propose a new approach, Collaborative Task Sequencing - Conflict-Based Search (CTS-CBS), which conducts a two-level search. In the high level, it generates a search forest, where each tree corresponds to a joint task sequence derived from the jTSP solution. In the low level, CTS-CBS performs constrained single-agent path planning to generate paths for each agent while adhering to high-level constraints. We also provide heoretical guarantees of its completeness and optimality (or sub-optimality with a bounded parameter). To evaluate the performance of CTS-CBS, we create two datasets, CTS-MAPF and MG-MAPF, and conduct comprehensive experiments. The results show that CTS-CBS adaptations for MG-MAPF outperform baseline algorithms in terms of success rate (up to 20 times larger) and runtime (up to 100 times faster), with less than a 10% sacrifice in solution quality. Furthermore, CTS-CBS offers flexibility by allowing users to adjust the sub-optimality bound omega to balance between solution quality and efficiency. Finally, practical robot tests demonstrate the algorithm's applicability in real-world scenarios.
Understanding Driver Cognition and Decision-Making Behaviors in High-Risk Scenarios: A Drift Diffusion Perspective
Mar 16, 2025

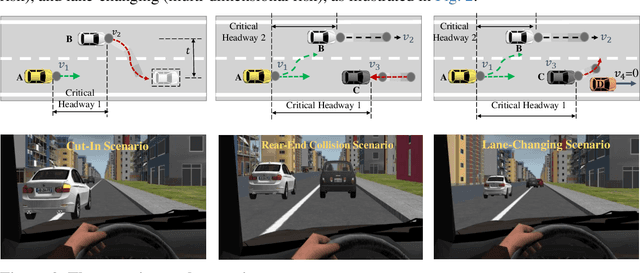
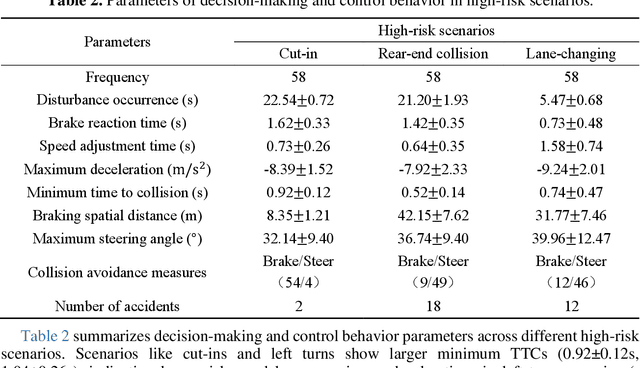
Ensuring safe interactions between autonomous vehicles (AVs) and human drivers in mixed traffic systems remains a major challenge, particularly in complex, high-risk scenarios. This paper presents a cognition-decision framework that integrates individual variability and commonalities in driver behavior to quantify risk cognition and model dynamic decision-making. First, a risk sensitivity model based on a multivariate Gaussian distribution is developed to characterize individual differences in risk cognition. Then, a cognitive decision-making model based on the drift diffusion model (DDM) is introduced to capture common decision-making mechanisms in high-risk environments. The DDM dynamically adjusts decision thresholds by integrating initial bias, drift rate, and boundary parameters, adapting to variations in speed, relative distance, and risk sensitivity to reflect diverse driving styles and risk preferences. By simulating high-risk scenarios with lateral, longitudinal, and multidimensional risk sources in a driving simulator, the proposed model accurately predicts cognitive responses and decision behaviors during emergency maneuvers. Specifically, by incorporating driver-specific risk sensitivity, the model enables dynamic adjustments of key DDM parameters, allowing for personalized decision-making representations in diverse scenarios. Comparative analysis with IDM, Gipps, and MOBIL demonstrates that DDM more precisely captures human cognitive processes and adaptive decision-making in high-risk scenarios. These findings provide a theoretical basis for modeling human driving behavior and offer critical insights for enhancing AV-human interaction in real-world traffic environments.
CSDO: Enhancing Efficiency and Success in Large-Scale Multi-Vehicle Trajectory Planning
May 31, 2024This paper presents an efficient algorithm, naming Centralized Searching and Decentralized Optimization (CSDO), to find feasible solution for large-scale Multi-Vehicle Trajectory Planning (MVTP) problem. Due to the intractable growth of non-convex constraints with the number of agents, exploring various homotopy classes that imply different convex domains, is crucial for finding a feasible solution. However, existing methods struggle to explore various homotopy classes efficiently due to combining it with time-consuming precise trajectory solution finding. CSDO, addresses this limitation by separating them into different levels and integrating an efficient Multi-Agent Path Finding (MAPF) algorithm to search homotopy classes. It first searches for a coarse initial guess using a large search step, identifying a specific homotopy class. Subsequent decentralized Quadratic Programming (QP) refinement processes this guess, resolving minor collisions efficiently. Experimental results demonstrate that CSDO outperforms existing MVTP algorithms in large-scale, high-density scenarios, achieving up to 95% success rate in 50m $\times$ 50m random scenarios around one second. Source codes are released in https://github.com/YangSVM/CSDOTrajectoryPlanning.
DenserRadar: A 4D millimeter-wave radar point cloud detector based on dense LiDAR point clouds
May 08, 2024



The 4D millimeter-wave (mmWave) radar, with its robustness in extreme environments, extensive detection range, and capabilities for measuring velocity and elevation, has demonstrated significant potential for enhancing the perception abilities of autonomous driving systems in corner-case scenarios. Nevertheless, the inherent sparsity and noise of 4D mmWave radar point clouds restrict its further development and practical application. In this paper, we introduce a novel 4D mmWave radar point cloud detector, which leverages high-resolution dense LiDAR point clouds. Our approach constructs dense 3D occupancy ground truth from stitched LiDAR point clouds, and employs a specially designed network named DenserRadar. The proposed method surpasses existing probability-based and learning-based radar point cloud detectors in terms of both point cloud density and accuracy on the K-Radar dataset.
PreGSU-A Generalized Traffic Scene Understanding Model for Autonomous Driving based on Pre-trained Graph Attention Network
Apr 16, 2024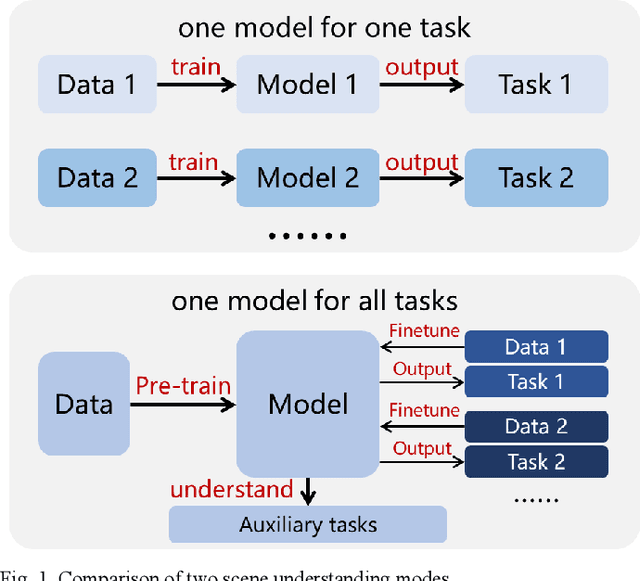
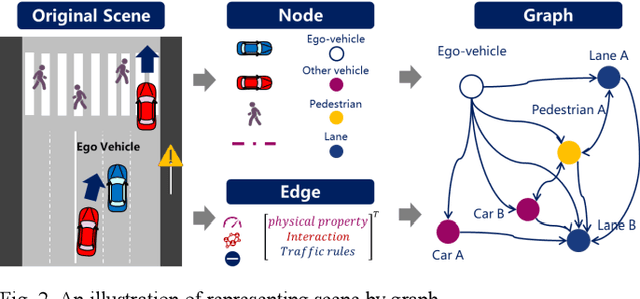
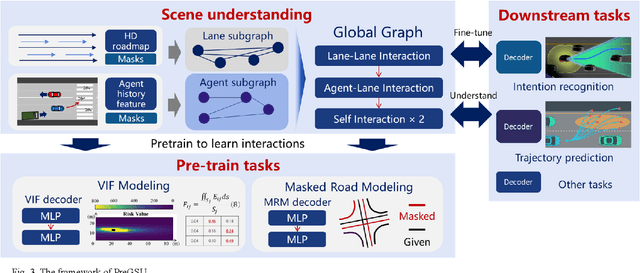
Scene understanding, defined as learning, extraction, and representation of interactions among traffic elements, is one of the critical challenges toward high-level autonomous driving (AD). Current scene understanding methods mainly focus on one concrete single task, such as trajectory prediction and risk level evaluation. Although they perform well on specific metrics, the generalization ability is insufficient to adapt to the real traffic complexity and downstream demand diversity. In this study, we propose PreGSU, a generalized pre-trained scene understanding model based on graph attention network to learn the universal interaction and reasoning of traffic scenes to support various downstream tasks. After the feature engineering and sub-graph module, all elements are embedded as nodes to form a dynamic weighted graph. Then, four graph attention layers are applied to learn the relationships among agents and lanes. In the pre-train phase, the understanding model is trained on two self-supervised tasks: Virtual Interaction Force (VIF) modeling and Masked Road Modeling (MRM). Based on the artificial potential field theory, VIF modeling enables PreGSU to capture the agent-to-agent interactions while MRM extracts agent-to-road connections. In the fine-tuning process, the pre-trained parameters are loaded to derive detailed understanding outputs. We conduct validation experiments on two downstream tasks, i.e., trajectory prediction in urban scenario, and intention recognition in highway scenario, to verify the generalized ability and understanding ability. Results show that compared with the baselines, PreGSU achieves better accuracy on both tasks, indicating the potential to be generalized to various scenes and targets. Ablation study shows the effectiveness of pre-train task design.
A Risk-aware Planning Framework of UGVs in Off-Road Environment
Feb 04, 2024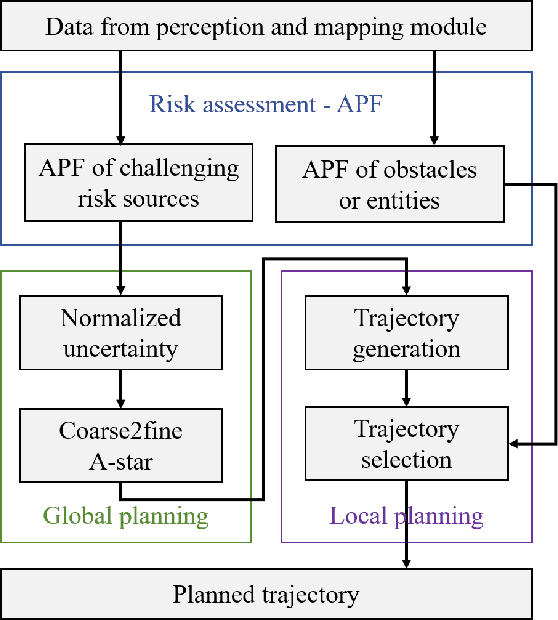
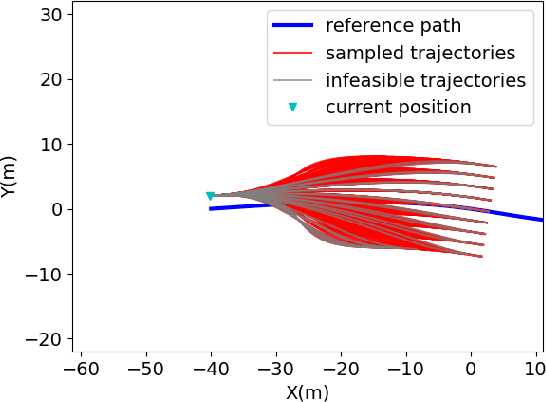
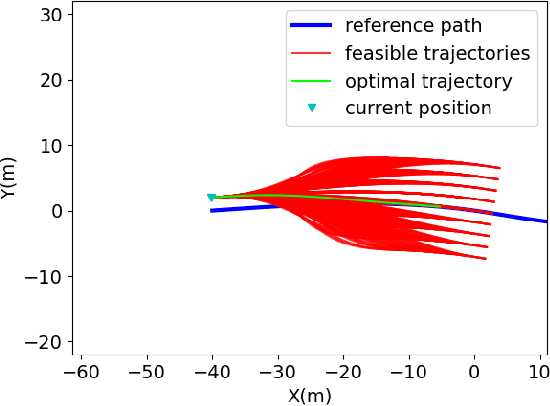
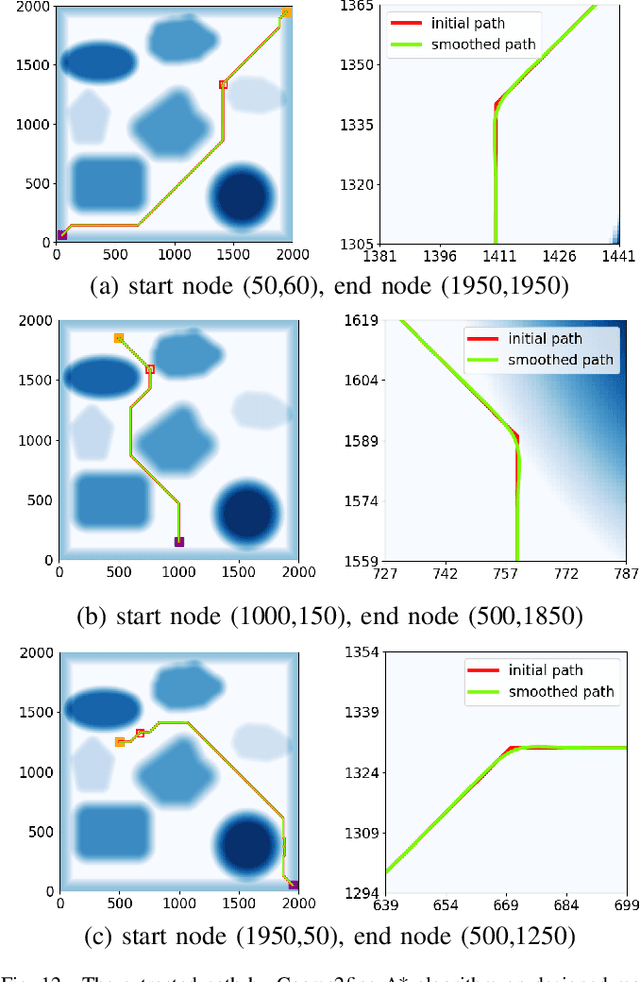
Planning module is an essential component of intelligent vehicle study. In this paper, we address the risk-aware planning problem of UGVs through a global-local planning framework which seamlessly integrates risk assessment methods. In particular, a global planning algorithm named Coarse2fine A* is proposed, which incorporates a potential field approach to enhance the safety of the planning results while ensuring the efficiency of the algorithm. A deterministic sampling method for local planning is leveraged and modified to suit off-road environment. It also integrates a risk assessment model to emphasize the avoidance of local risks. The performance of the algorithm is demonstrated through simulation experiments by comparing it with baseline algorithms, where the results of Coarse2fine A* are shown to be approximately 30% safer than those of the baseline algorithms. The practicality and effectiveness of the proposed planning framework are validated by deploying it on a real-world system consisting of a control center and a practical UGV platform.