 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemini 1.5: Unlocking multimodal understanding across millions of tokens of context
Mar 08, 2024In this report, we present the latest model of the Gemini family, Gemini 1.5 Pro, a highly compute-efficient multimodal mixture-of-experts model capable of recalling and reasoning over fine-grained information from millions of tokens of context, including multiple long documents and hours of video and audio. Gemini 1.5 Pro achieves near-perfect recall on long-context retrieval tasks across modalities, improves the state-of-the-art in long-document QA, long-video QA and long-context ASR, and matches or surpasses Gemini 1.0 Ultra's state-of-the-art performance across a broad set of benchmarks. Studying the limits of Gemini 1.5 Pro's long-context ability, we find continued improvement in next-token prediction and near-perfect retrieval (>99%) up to at least 10M tokens, a generational leap over existing models such as Claude 2.1 (200k) and GPT-4 Turbo (128k). Finally, we highlight surprising new capabilities of large language models at the frontier; when given a grammar manual for Kalamang, a language with fewer than 200 speakers worldwide, the model learns to translate English to Kalamang at a similar level to a person who learned from the same content.
A Neural Emulator for Uncertainty Estimation of Fire Propagation
May 15, 2023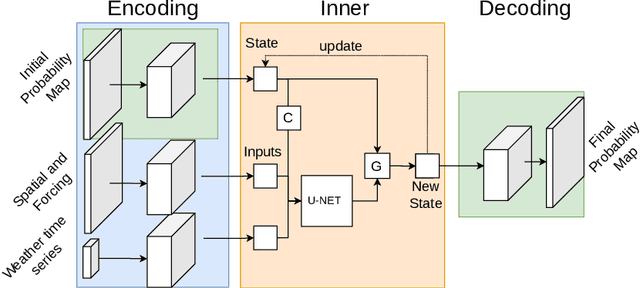
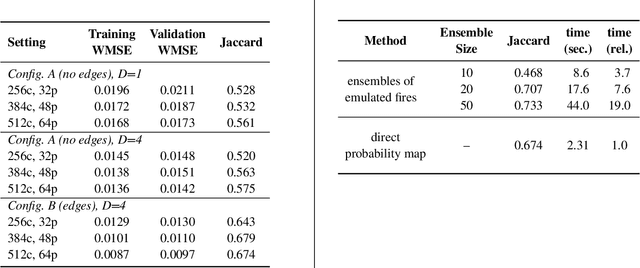
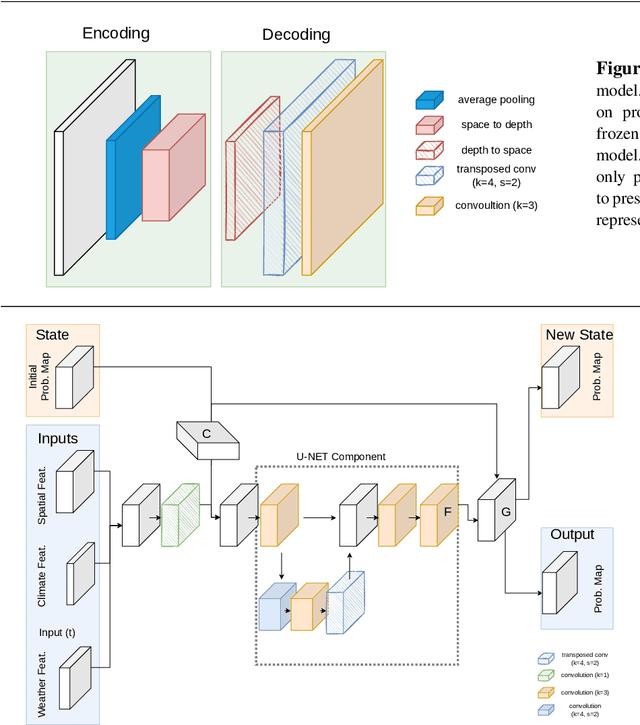
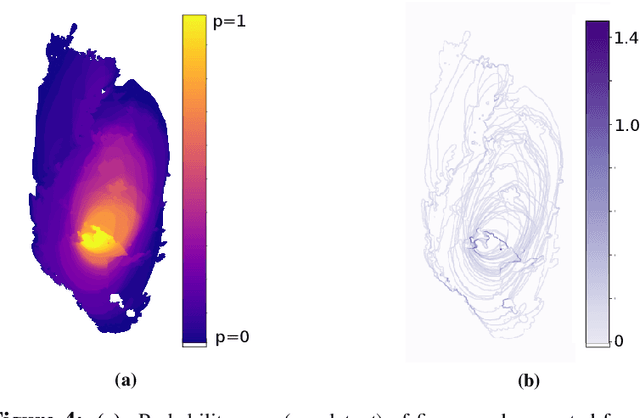
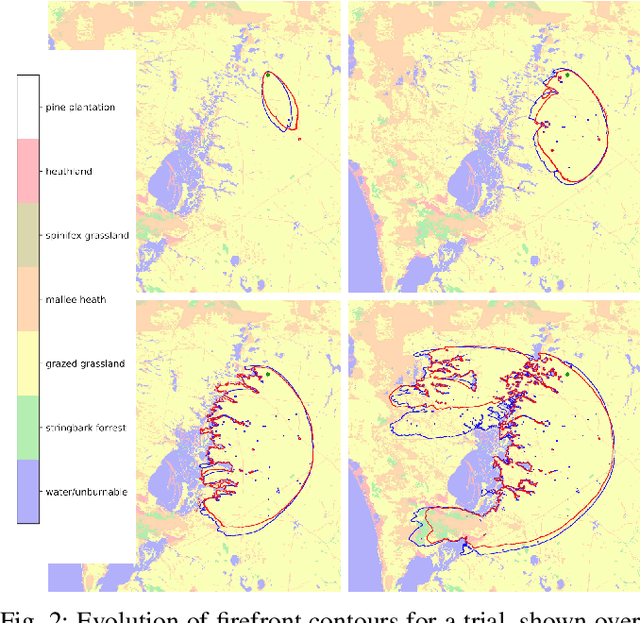
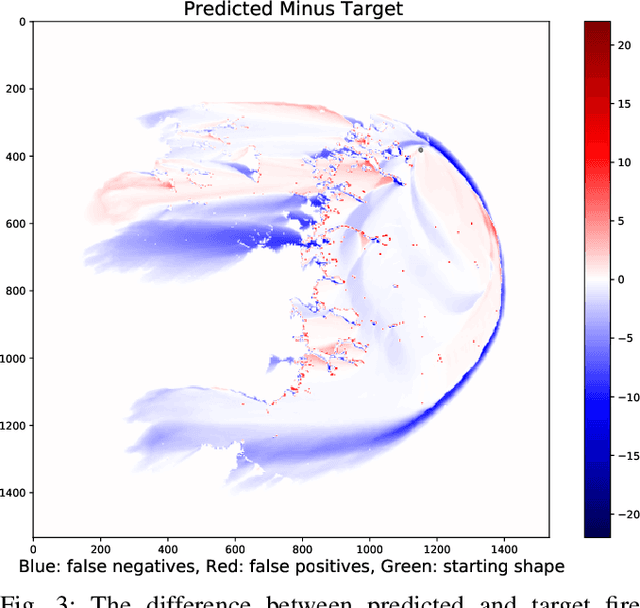
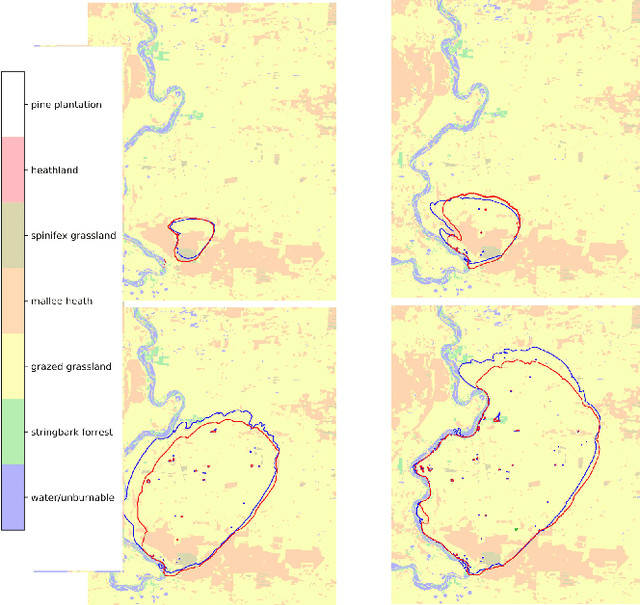
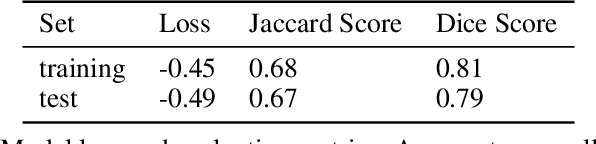
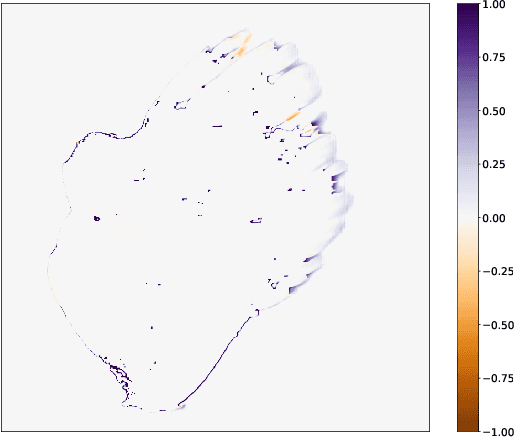
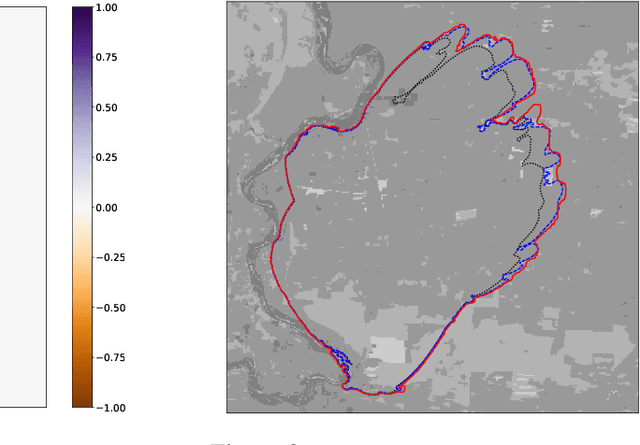
Wildfire propagation is a highly stochastic process where small changes in environmental conditions (such as wind speed and direction) can lead to large changes in observed behaviour. A traditional approach to quantify uncertainty in fire-front progression is to generate probability maps via ensembles of simulations. However, use of ensembles is typically computationally expensive, which can limit the scope of uncertainty analysis. To address this, we explore the use of a spatio-temporal neural-based modelling approach to directly estimate the likelihood of fire propagation given uncertainty in input parameters. The uncertainty is represented by deliberately perturbing the input weather forecast during model training. The computational load is concentrated in the model training process, which allows larger probability spaces to be explored during deployment. Empirical evaluations indicate that the proposed model achieves comparable fire boundaries to those produced by the traditional SPARK simulation platform, with an overall Jaccard index (similarity score) of 67.4% on a set of 35 simulated fires. When compared to a related neural model (emulator) which was employed to generate probability maps via ensembles of emulated fires, the proposed approach produces competitive Jaccard similarity scores while being approximately an order of magnitude faster.
Bayesian Physics Informed Neural Networks for Data Assimilation and Spatio-Temporal Modelling of Wildfires
Dec 02, 2022We apply Physics Informed Neural Networks (PINNs) to the problem of wildfire fire-front modelling. The PINN is an approach that integrates a differential equation into the optimisation loss function of a neural network to guide the neural network to learn the physics of a problem. We apply the PINN to the level-set equation, which is a Hamilton-Jacobi partial differential equation that models a fire-front with the zero-level set. This results in a PINN that simulates a fire-front as it propagates through a spatio-temporal domain. We demonstrate the agility of the PINN to learn physical properties of a fire under extreme changes in external conditions (such as wind) and show that this approach encourages continuity of the PINN's solution across time. Furthermore, we demonstrate how data assimilation and uncertainty quantification can be incorporated into the PINN in the wildfire context. This is significant contribution to wildfire modelling as the level-set method -- which is a standard solver to the level-set equation -- does not naturally provide this capability.
A Spatio-Temporal Neural Network Forecasting Approach for Emulation of Firefront Models
Jun 22, 2022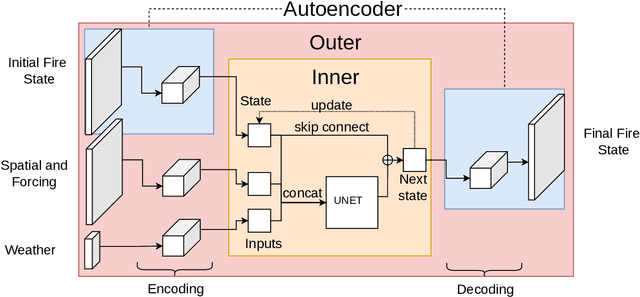
Computational simulations of wildfire spread typically employ empirical rate-of-spread calculations under various conditions (such as terrain, fuel type, weather). Small perturbations in conditions can often lead to significant changes in fire spread (such as speed and direction), necessitating a computationally expensive large set of simulations to quantify uncertainty. Model emulation seeks alternative representations of physical models using machine learning, aiming to provide more efficient and/or simplified surrogate models. We propose a dedicated spatio-temporal neural network based framework for model emulation, able to capture the complex behaviour of fire spread models. The proposed approach can approximate forecasts at fine spatial and temporal resolutions that are often challenging for neural network based approaches. Furthermore, the proposed approach is robust even with small training sets, due to novel data augmentation methods. Empirical experiments show good agreement between simulated and emulated firefronts, with an average Jaccard score of 0.76.
An Emulation Framework for Fire Front Spread
Mar 23, 2022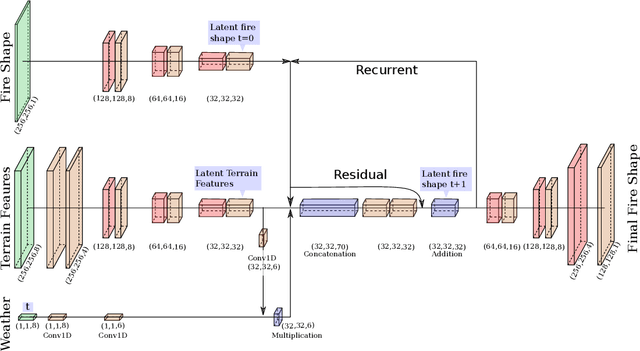
Forecasting bushfire spread is an important element in fire prevention and response efforts. Empirical observations of bushfire spread can be used to estimate fire response under certain conditions. These observations form rate-of-spread models, which can be used to generate simulations. We use machine learning to drive the emulation approach for bushfires and show that emulation has the capacity to closely reproduce simulated fire-front data. We present a preliminary emulator approach with the capacity for fast emulation of complex simulations. Large numbers of predictions can then be generated as part of ensemble estimation techniques, which provide more robust and reliable forecasts of stochastic systems.
Using Unity to Help Solve Intelligence
Nov 18, 2020
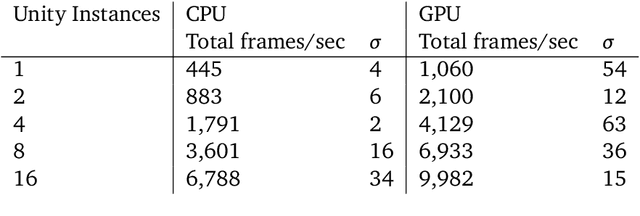
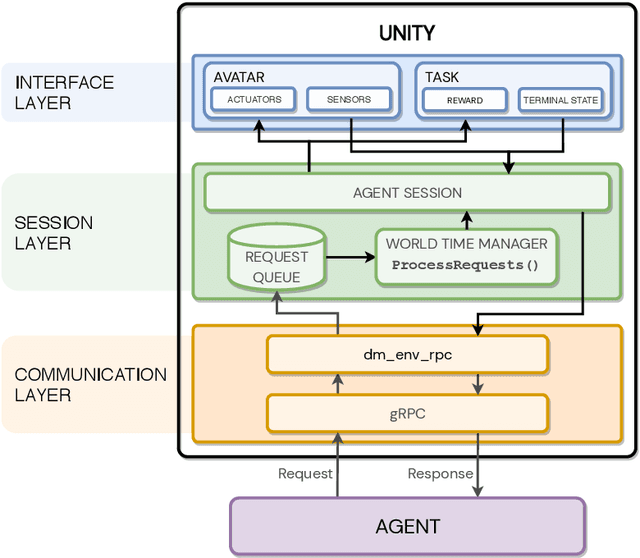
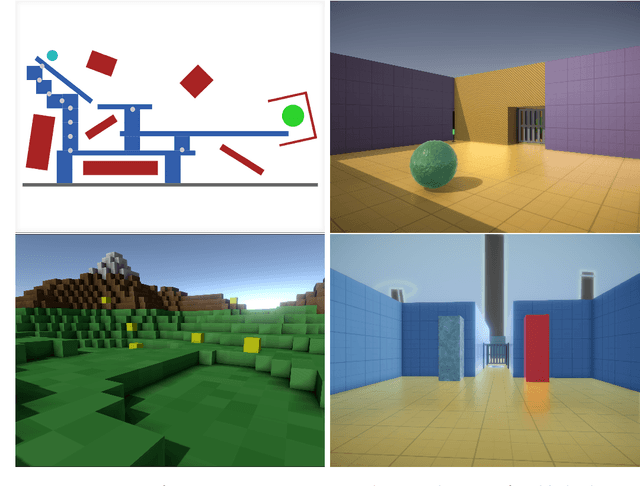
In the pursuit of artificial general intelligence, our most significant measurement of progress is an agent's ability to achieve goals in a wide range of environments. Existing platforms for constructing such environments are typically constrained by the technologies they are founded on, and are therefore only able to provide a subset of scenarios necessary to evaluate progress. To overcome these shortcomings, we present our use of Unity, a widely recognized and comprehensive game engine, to create more diverse, complex, virtual simulations. We describe the concepts and components developed to simplify the authoring of these environments, intended for use predominantly in the field of reinforcement learning. We also introduce a practical approach to packaging and re-distributing environments in a way that attempts to improve the robustness and reproducibility of experiment results. To illustrate the versatility of our use of Unity compared to other solutions, we highlight environments already created using our approach from published papers. We hope that others can draw inspiration from how we adapted Unity to our needs, and anticipate increasingly varied and complex environments to emerge from our approach as familiarity grows.
Learned human-agent decision-making, communication and joint action in a virtual reality environment
May 07, 2019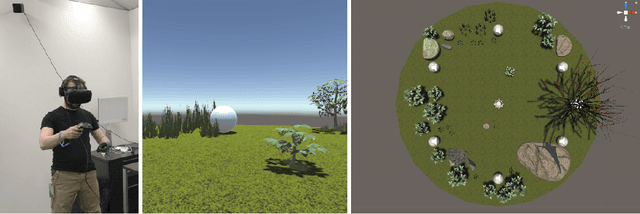
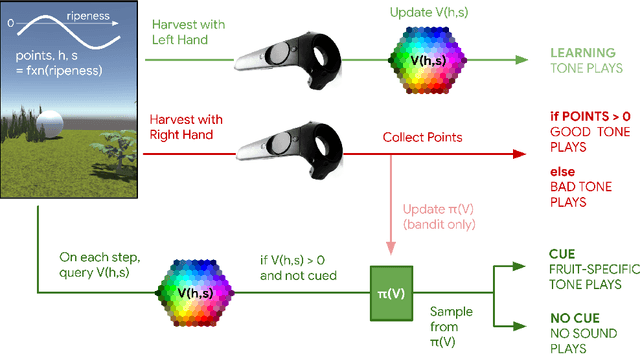
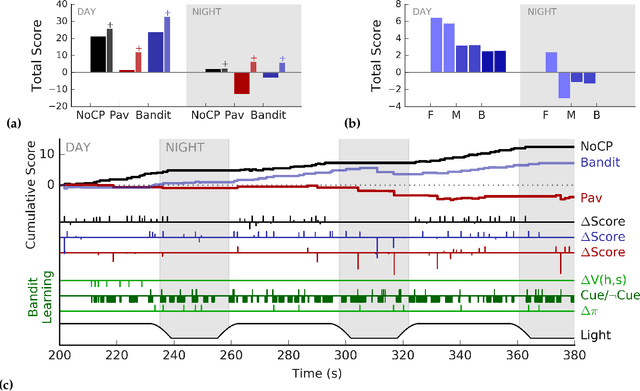
Humans make decisions and act alongside other humans to pursue both short-term and long-term goals. As a result of ongoing progress in areas such as computing science and automation, humans now also interact with non-human agents of varying complexity as part of their day-to-day activities; substantial work is being done to integrate increasingly intelligent machine agents into human work and play. With increases in the cognitive, sensory, and motor capacity of these agents, intelligent machinery for human assistance can now reasonably be considered to engage in joint action with humans---i.e., two or more agents adapting their behaviour and their understanding of each other so as to progress in shared objectives or goals. The mechanisms, conditions, and opportunities for skillful joint action in human-machine partnerships is of great interest to multiple communities. Despite this, human-machine joint action is as yet under-explored, especially in cases where a human and an intelligent machine interact in a persistent way during the course of real-time, daily-life experience. In this work, we contribute a virtual reality environment wherein a human and an agent can adapt their predictions, their actions, and their communication so as to pursue a simple foraging task. In a case study with a single participant, we provide an example of human-agent coordination and decision-making involving prediction learning on the part of the human and the machine agent, and control learning on the part of the machine agent wherein audio communication signals are used to cue its human partner in service of acquiring shared reward. These comparisons suggest the utility of studying human-machine coordination in a virtual reality environment, and identify further research that will expand our understanding of persistent human-machine joint action.