 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtreme Value Modelling of Feature Residuals for Anomaly Detection in Dynamic Graphs
Oct 08, 2024Detecting anomalies in a temporal sequence of graphs can be applied is areas such as the detection of accidents in transport networks and cyber attacks in computer networks. Existing methods for detecting abnormal graphs can suffer from multiple limitations, such as high false positive rates as well as difficulties with handling variable-sized graphs and non-trivial temporal dynamics. To address this, we propose a technique where temporal dependencies are explicitly modelled via time series analysis of a large set of pertinent graph features, followed by using residuals to remove the dependencies. Extreme Value Theory is then used to robustly model and classify any remaining extremes, aiming to produce low false positives rates. Comparative evaluations on a multitude of graph instances show that the proposed approach obtains considerably better accuracy than TensorSplat and Laplacian Anomaly Detection.
Approximate Nearest Neighbour Search on Dynamic Datasets: An Investigation
Apr 30, 2024Approximate k-Nearest Neighbour (ANN) methods are often used for mining information and aiding machine learning on large scale high-dimensional datasets. ANN methods typically differ in the index structure used for accelerating searches, resulting in various recall/runtime trade-off points. For applications with static datasets, runtime constraints and dataset properties can be used to empirically select an ANN method with suitable operating characteristics. However, for applications with dynamic datasets, which are subject to frequent online changes (like addition of new samples), there is currently no consensus as to which ANN methods are most suitable. Traditional evaluation approaches do not consider the computational costs of updating the index structure, as well as the frequency and size of index updates. To address this, we empirically evaluate 5 popular ANN methods on two main applications (online data collection and online feature learning) while taking into account these considerations. Two dynamic datasets are used, derived from the SIFT1M dataset with 1 million samples and the DEEP1B dataset with 1 billion samples. The results indicate that the often used k-d trees method is not suitable on dynamic datasets as it is slower than a straightforward baseline exhaustive search method. For online data collection, the Hierarchical Navigable Small World Graphs method achieves a consistent speedup over baseline across a wide range of recall rates. For online feature learning, the Scalable Nearest Neighbours method is faster than baseline for recall rates below 75%.
Resolving Ethics Trade-offs in Implementing Responsible AI
Jan 16, 2024While the operationalisation of high-level AI ethics principles into practical AI/ML systems has made progress, there is still a theory-practice gap in managing tensions between the underlying AI ethics aspects. We cover five approaches for addressing the tensions via trade-offs, ranging from rudimentary to complex. The approaches differ in the types of considered context, scope, methods for measuring contexts, and degree of justification. None of the approaches is likely to be appropriate for all organisations, systems, or applications. To address this, we propose a framework which consists of: (i) proactive identification of tensions, (ii) prioritisation and weighting of ethics aspects, (iii) justification and documentation of trade-off decisions. The proposed framework aims to facilitate the implementation of well-rounded AI/ML systems that are appropriate for potential regulatory requirements.
Solving Travelling Thief Problems using Coordination Based Methods
Oct 11, 2023A travelling thief problem (TTP) is a proxy to real-life problems such as postal collection. TTP comprises an entanglement of a travelling salesman problem (TSP) and a knapsack problem (KP) since items of KP are scattered over cities of TSP, and a thief has to visit cities to collect items. In TTP, city selection and item selection decisions need close coordination since the thief's travelling speed depends on the knapsack's weight and the order of visiting cities affects the order of item collection. Existing TTP solvers deal with city selection and item selection separately, keeping decisions for one type unchanged while dealing with the other type. This separation essentially means very poor coordination between two types of decision. In this paper, we first show that a simple local search based coordination approach does not work in TTP. Then, to address the aforementioned problems, we propose a human designed coordination heuristic that makes changes to collection plans during exploration of cyclic tours. We further propose another human designed coordination heuristic that explicitly exploits the cyclic tours in item selections during collection plan exploration. Lastly, we propose a machine learning based coordination heuristic that captures characteristics of the two human designed coordination heuristics. Our proposed coordination based approaches help our TTP solver significantly outperform existing state-of-the-art TTP solvers on a set of benchmark problems. Our solver is named Cooperation Coordination (CoCo) and its source code is available from https://github.com/majid75/CoCo
Reducing Object Detection Uncertainty from RGB and Thermal Data for UAV Outdoor Surveillance
Aug 21, 2023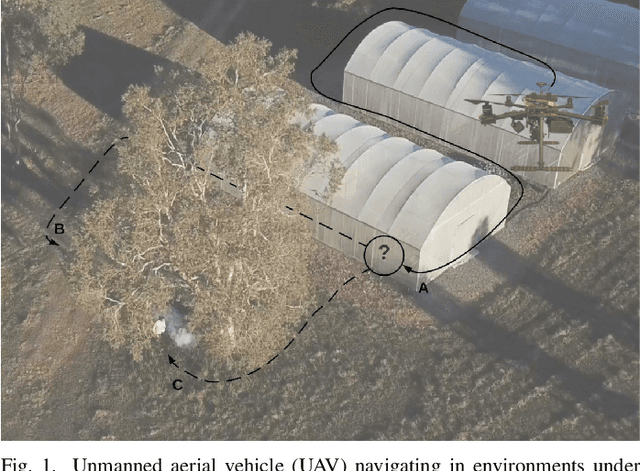
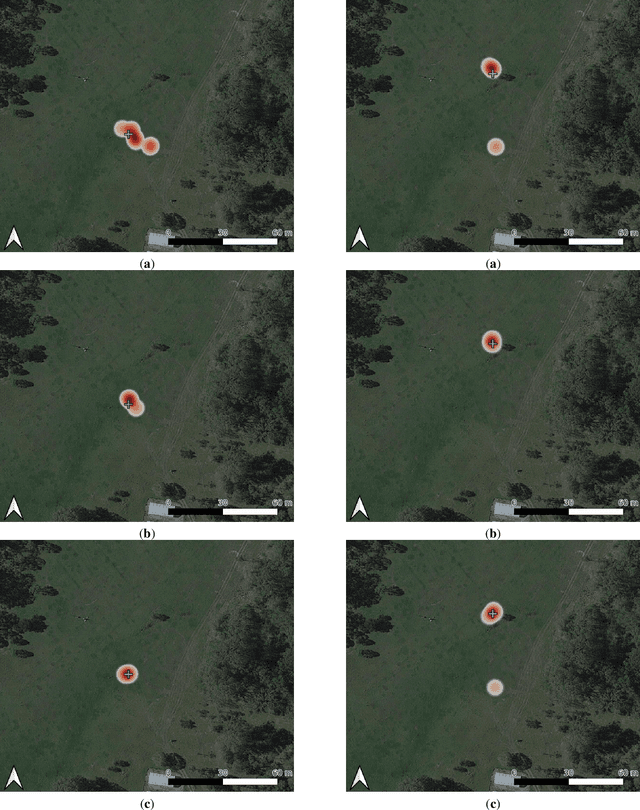
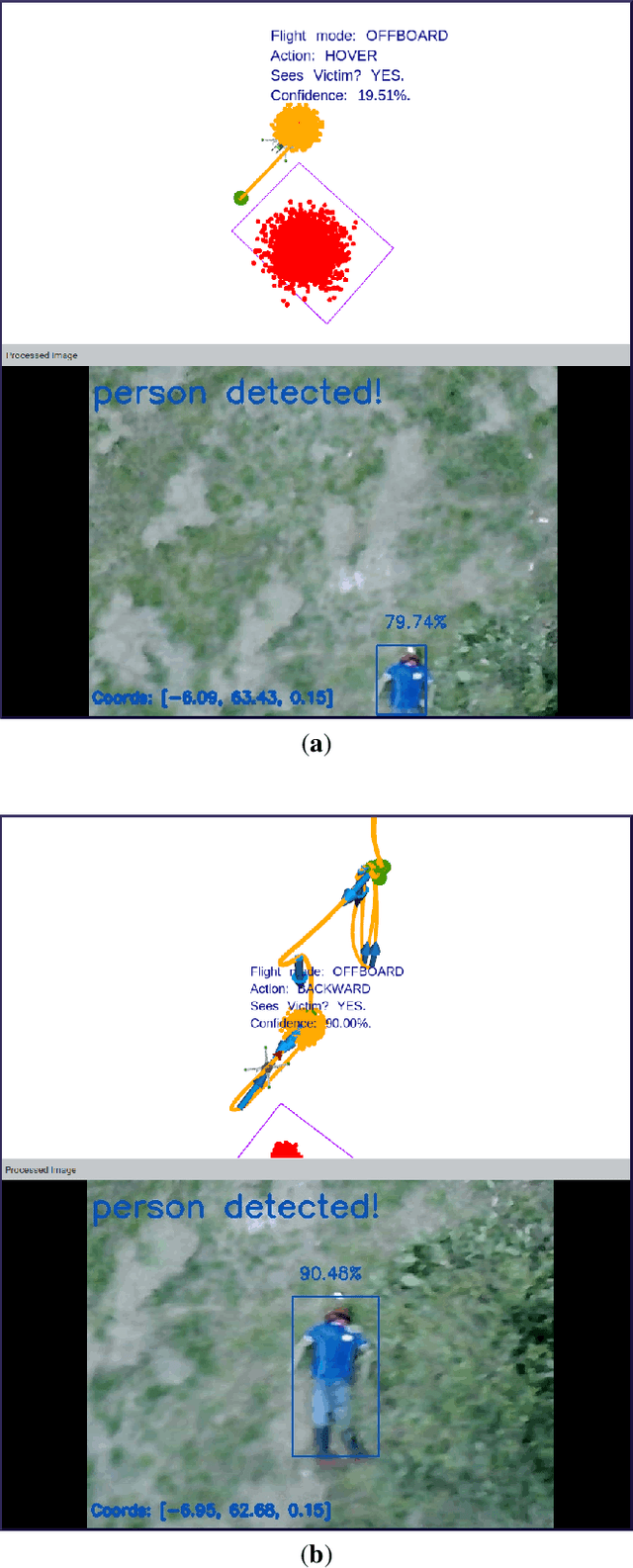
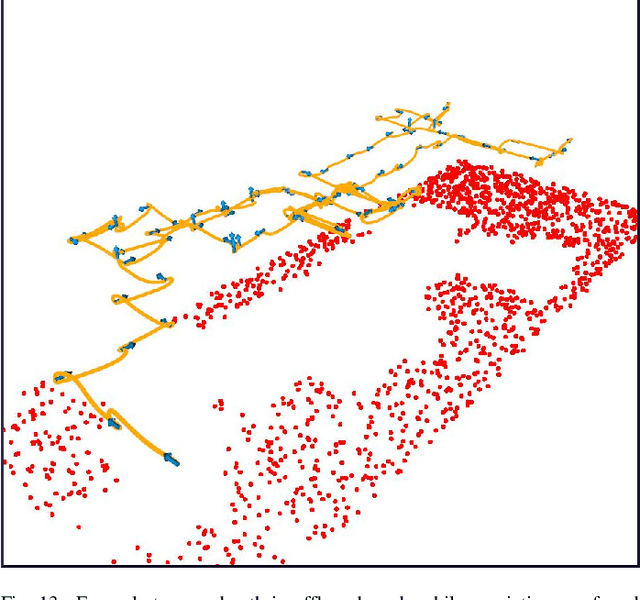
Recent advances in Unmanned Aerial Vehicles (UAVs) have resulted in their quick adoption for wide a range of civilian applications, including precision agriculture, biosecurity, disaster monitoring and surveillance. UAVs offer low-cost platforms with flexible hardware configurations, as well as an increasing number of autonomous capabilities, including take-off, landing, object tracking and obstacle avoidance. However, little attention has been paid to how UAVs deal with object detection uncertainties caused by false readings from vision-based detectors, data noise, vibrations, and occlusion. In most situations, the relevance and understanding of these detections are delegated to human operators, as many UAVs have limited cognition power to interact autonomously with the environment. This paper presents a framework for autonomous navigation under uncertainty in outdoor scenarios for small UAVs using a probabilistic-based motion planner. The framework is evaluated with real flight tests using a sub 2 kg quadrotor UAV and illustrated in victim finding Search and Rescue (SAR) case study in a forest/bushland. The navigation problem is modelled using a Partially Observable Markov Decision Process (POMDP), and solved in real time onboard the small UAV using Augmented Belief Trees (ABT) and the TAPIR toolkit. Results from experiments using colour and thermal imagery show that the proposed motion planner provides accurate victim localisation coordinates, as the UAV has the flexibility to interact with the environment and obtain clearer visualisations of any potential victims compared to the baseline motion planner. Incorporating this system allows optimised UAV surveillance operations by diminishing false positive readings from vision-based object detectors.
A Neural Emulator for Uncertainty Estimation of Fire Propagation
May 15, 2023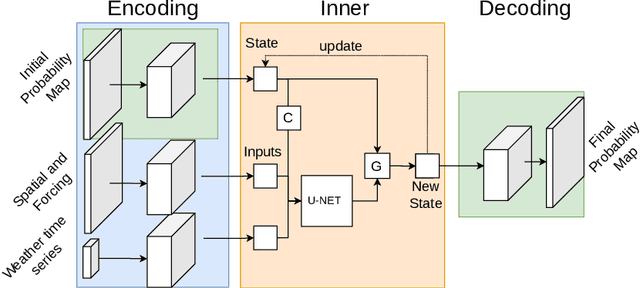
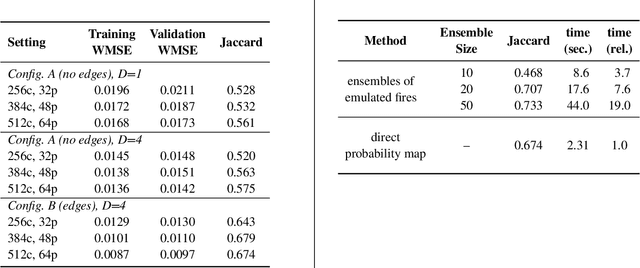
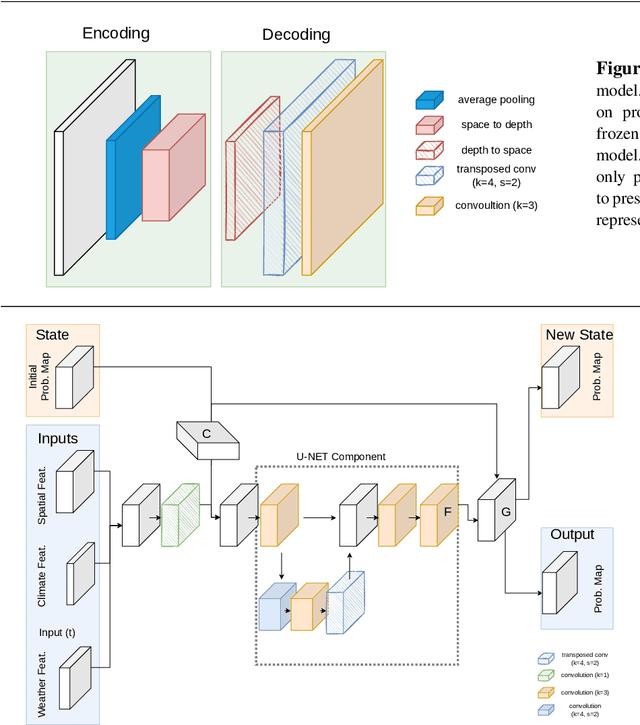
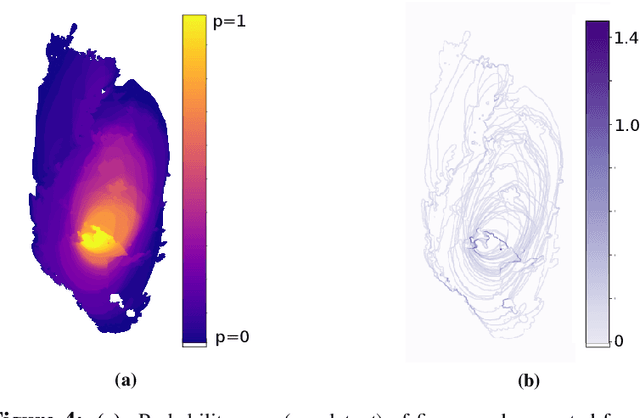
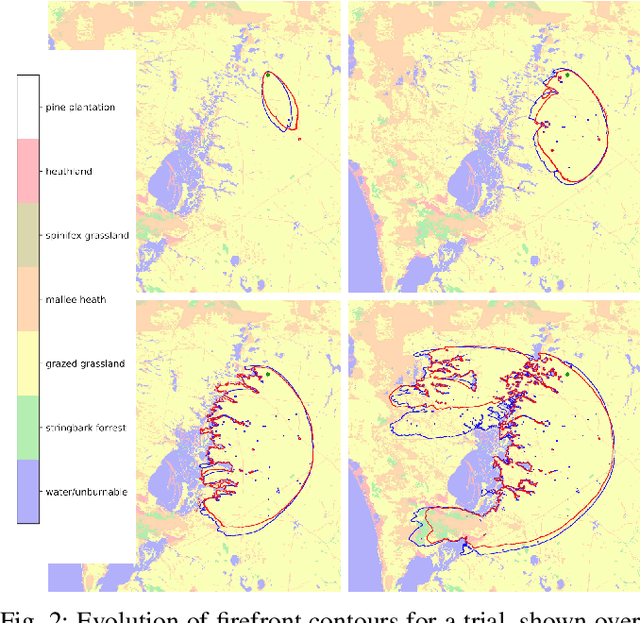
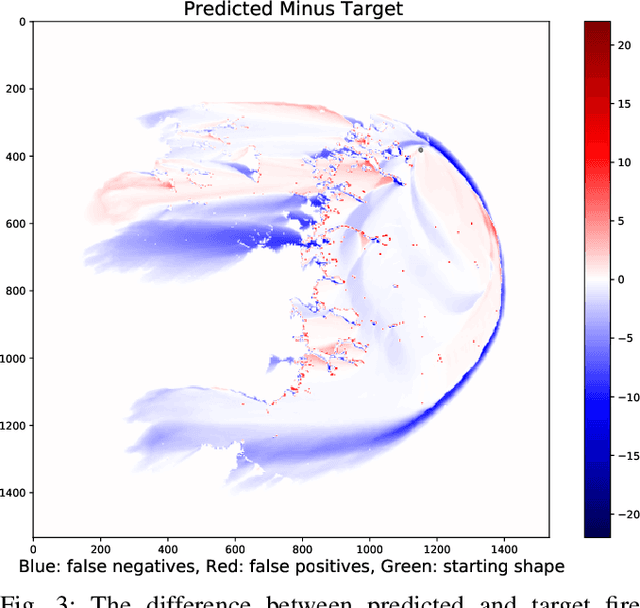
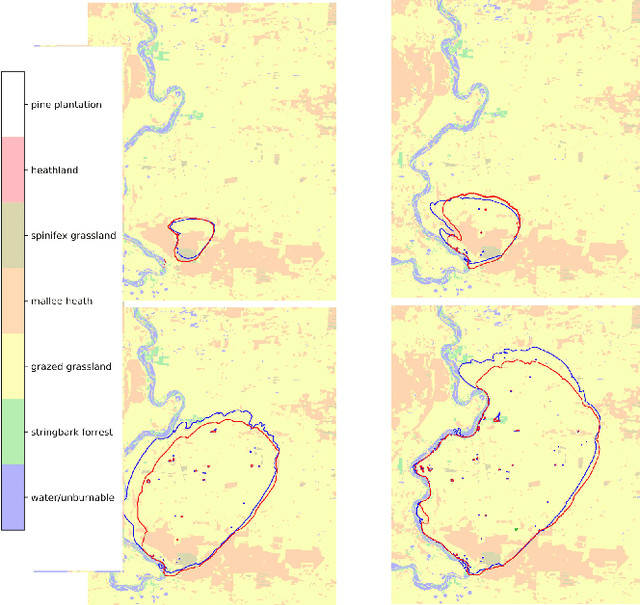
Wildfire propagation is a highly stochastic process where small changes in environmental conditions (such as wind speed and direction) can lead to large changes in observed behaviour. A traditional approach to quantify uncertainty in fire-front progression is to generate probability maps via ensembles of simulations. However, use of ensembles is typically computationally expensive, which can limit the scope of uncertainty analysis. To address this, we explore the use of a spatio-temporal neural-based modelling approach to directly estimate the likelihood of fire propagation given uncertainty in input parameters. The uncertainty is represented by deliberately perturbing the input weather forecast during model training. The computational load is concentrated in the model training process, which allows larger probability spaces to be explored during deployment. Empirical evaluations indicate that the proposed model achieves comparable fire boundaries to those produced by the traditional SPARK simulation platform, with an overall Jaccard index (similarity score) of 67.4% on a set of 35 simulated fires. When compared to a related neural model (emulator) which was employed to generate probability maps via ensembles of emulated fires, the proposed approach produces competitive Jaccard similarity scores while being approximately an order of magnitude faster.
Implementing Responsible AI: Tensions and Trade-Offs Between Ethics Aspects
Apr 21, 2023Many sets of ethics principles for responsible AI have been proposed to allay concerns about misuse and abuse of AI/ML systems. The underlying aspects of such sets of principles include privacy, accuracy, fairness, robustness, explainability, and transparency. However, there are potential tensions between these aspects that pose difficulties for AI/ML developers seeking to follow these principles. For example, increasing the accuracy of an AI/ML system may reduce its explainability. As part of the ongoing effort to operationalise the principles into practice, in this work we compile and discuss a catalogue of 10 notable tensions, trade-offs and other interactions between the underlying aspects. We primarily focus on two-sided interactions, drawing on support spread across a diverse literature. This catalogue can be helpful in raising awareness of the possible interactions between aspects of ethics principles, as well as facilitating well-supported judgements by the designers and developers of AI/ML systems.
Bayesian Physics Informed Neural Networks for Data Assimilation and Spatio-Temporal Modelling of Wildfires
Dec 02, 2022We apply Physics Informed Neural Networks (PINNs) to the problem of wildfire fire-front modelling. The PINN is an approach that integrates a differential equation into the optimisation loss function of a neural network to guide the neural network to learn the physics of a problem. We apply the PINN to the level-set equation, which is a Hamilton-Jacobi partial differential equation that models a fire-front with the zero-level set. This results in a PINN that simulates a fire-front as it propagates through a spatio-temporal domain. We demonstrate the agility of the PINN to learn physical properties of a fire under extreme changes in external conditions (such as wind) and show that this approach encourages continuity of the PINN's solution across time. Furthermore, we demonstrate how data assimilation and uncertainty quantification can be incorporated into the PINN in the wildfire context. This is significant contribution to wildfire modelling as the level-set method -- which is a standard solver to the level-set equation -- does not naturally provide this capability.
A Spatio-Temporal Neural Network Forecasting Approach for Emulation of Firefront Models
Jun 22, 2022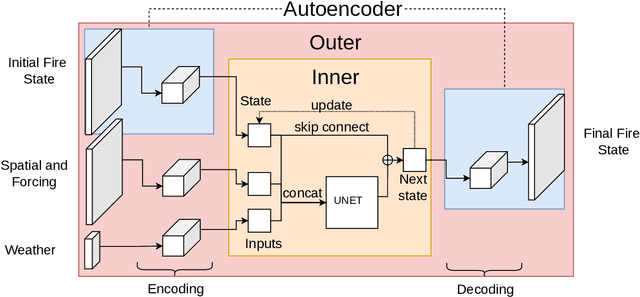
Computational simulations of wildfire spread typically employ empirical rate-of-spread calculations under various conditions (such as terrain, fuel type, weather). Small perturbations in conditions can often lead to significant changes in fire spread (such as speed and direction), necessitating a computationally expensive large set of simulations to quantify uncertainty. Model emulation seeks alternative representations of physical models using machine learning, aiming to provide more efficient and/or simplified surrogate models. We propose a dedicated spatio-temporal neural network based framework for model emulation, able to capture the complex behaviour of fire spread models. The proposed approach can approximate forecasts at fine spatial and temporal resolutions that are often challenging for neural network based approaches. Furthermore, the proposed approach is robust even with small training sets, due to novel data augmentation methods. Empirical experiments show good agreement between simulated and emulated firefronts, with an average Jaccard score of 0.76.
AI Ethics Principles in Practice: Perspectives of Designers and Developers
Dec 14, 2021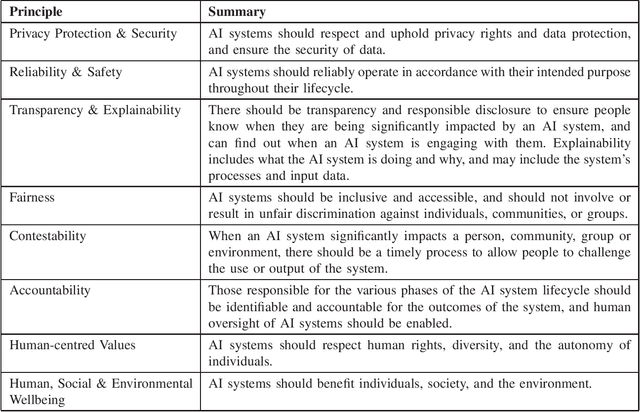
As consensus across the various published AI ethics principles is approached, a gap remains between high-level principles and practical techniques that can be readily adopted to design and develop responsible AI systems. We examine the practices and experiences of researchers and engineers from Australia's national scientific research agency (CSIRO), who are involved in designing and developing AI systems for a range of purposes. Semi-structured interviews were used to examine how the practices of the participants relate to and align with a set of high-level AI ethics principles that are proposed by the Australian Government. The principles comprise: Privacy Protection & Security, Reliability & Safety, Transparency & Explainability, Fairness, Contestability, Accountability, Human-centred Values, and Human, Social & Environmental Wellbeing. The insights of the researchers and engineers as well as the challenges that arose for them in the practical application of the principles are examined. Finally, a set of organisational responses are provided to support the implementation of high-level AI ethics principles into practice.