 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReducing Object Detection Uncertainty from RGB and Thermal Data for UAV Outdoor Surveillance
Paper and Code
Aug 21, 2023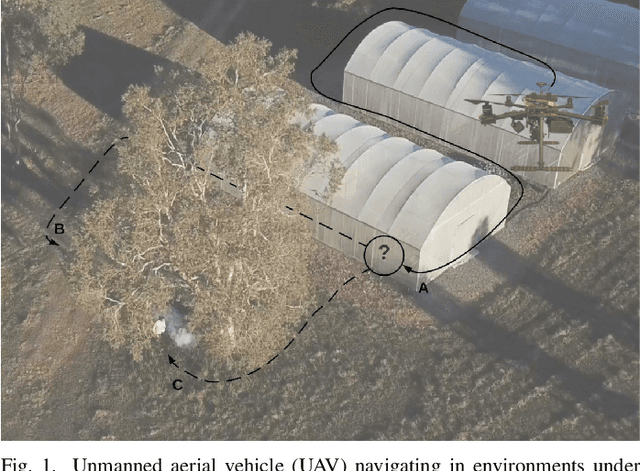
Recent advances in Unmanned Aerial Vehicles (UAVs) have resulted in their quick adoption for wide a range of civilian applications, including precision agriculture, biosecurity, disaster monitoring and surveillance. UAVs offer low-cost platforms with flexible hardware configurations, as well as an increasing number of autonomous capabilities, including take-off, landing, object tracking and obstacle avoidance. However, little attention has been paid to how UAVs deal with object detection uncertainties caused by false readings from vision-based detectors, data noise, vibrations, and occlusion. In most situations, the relevance and understanding of these detections are delegated to human operators, as many UAVs have limited cognition power to interact autonomously with the environment. This paper presents a framework for autonomous navigation under uncertainty in outdoor scenarios for small UAVs using a probabilistic-based motion planner. The framework is evaluated with real flight tests using a sub 2 kg quadrotor UAV and illustrated in victim finding Search and Rescue (SAR) case study in a forest/bushland. The navigation problem is modelled using a Partially Observable Markov Decision Process (POMDP), and solved in real time onboard the small UAV using Augmented Belief Trees (ABT) and the TAPIR toolkit. Results from experiments using colour and thermal imagery show that the proposed motion planner provides accurate victim localisation coordinates, as the UAV has the flexibility to interact with the environment and obtain clearer visualisations of any potential victims compared to the baseline motion planner. Incorporating this system allows optimised UAV surveillance operations by diminishing false positive readings from vision-based object detectors.