 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEHRMamba: Towards Generalizable and Scalable Foundation Models for Electronic Health Records
May 23, 2024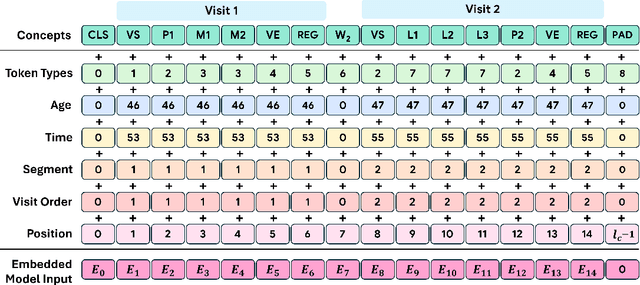
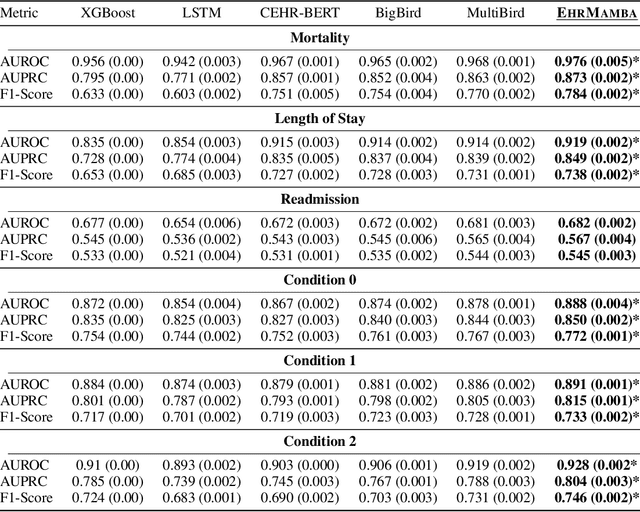
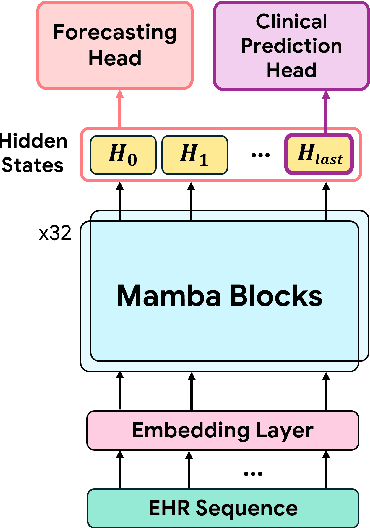
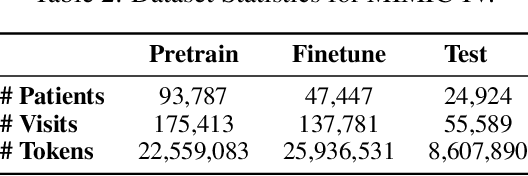
Transformers have significantly advanced the modeling of Electronic Health Records (EHR), yet their deployment in real-world healthcare is limited by several key challenges. Firstly, the quadratic computational cost and insufficient context length of these models pose significant obstacles for hospitals in processing the extensive medical histories typical in EHR data. Additionally, existing models employ separate finetuning for each clinical task, complicating maintenance in healthcare environments. Moreover, these models focus exclusively on either clinical prediction or EHR forecasting, lacking the flexibility to perform well across both. To overcome these limitations, we introduce EHRMamba, a robust foundation model built on the Mamba architecture. EHRMamba can process sequences up to four times longer than previous models due to its linear computational cost. We also introduce a novel approach to Multitask Prompted Finetuning (MTF) for EHR data, which enables EHRMamba to simultaneously learn multiple clinical tasks in a single finetuning phase, significantly enhancing deployment and cross-task generalization. Furthermore, our model leverages the HL7 FHIR data standard to simplify integration into existing hospital systems. Alongside EHRMamba, we open-source Odyssey, a toolkit designed to support the development and deployment of EHR foundation models, with an emphasis on data standardization and interpretability. Our evaluations on the MIMIC-IV dataset demonstrate that EHRMamba advances state-of-the-art performance across 6 major clinical tasks and excels in EHR forecasting, marking a significant leap forward in the field.
FENDA-FL: Personalized Federated Learning on Heterogeneous Clinical Datasets
Sep 28, 2023



Federated learning (FL) is increasingly being recognized as a key approach to overcoming the data silos that so frequently obstruct the training and deployment of machine-learning models in clinical settings. This work contributes to a growing body of FL research specifically focused on clinical applications along three important directions. First, an extension of the FENDA method (Kim et al., 2016) to the FL setting is proposed. Experiments conducted on the FLamby benchmarks (du Terrail et al., 2022a) and GEMINI datasets (Verma et al., 2017) show that the approach is robust to heterogeneous clinical data and often outperforms existing global and personalized FL techniques. Further, the experimental results represent substantive improvements over the original FLamby benchmarks and expand such benchmarks to include evaluation of personalized FL methods. Finally, we advocate for a comprehensive checkpointing and evaluation framework for FL to better reflect practical settings and provide multiple baselines for comparison.
MLHOps: Machine Learning for Healthcare Operations
May 04, 2023



Machine Learning Health Operations (MLHOps) is the combination of processes for reliable, efficient, usable, and ethical deployment and maintenance of machine learning models in healthcare settings. This paper provides both a survey of work in this area and guidelines for developers and clinicians to deploy and maintain their own models in clinical practice. We cover the foundational concepts of general machine learning operations, describe the initial setup of MLHOps pipelines (including data sources, preparation, engineering, and tools). We then describe long-term monitoring and updating (including data distribution shifts and model updating) and ethical considerations (including bias, fairness, interpretability, and privacy). This work therefore provides guidance across the full pipeline of MLHOps from conception to initial and ongoing deployment.
Characterising the Robustness of Reinforcement Learning for Continuous Control using Disturbance Injection
Oct 27, 2022In this study, we leverage the deliberate and systematic fault-injection capabilities of an open-source benchmark suite to perform a series of experiments on state-of-the-art deep and robust reinforcement learning algorithms. We aim to benchmark robustness in the context of continuous action spaces -- crucial for deployment in robot control. We find that robustness is more prominent for action disturbances than it is for disturbances to observations and dynamics. We also observe that state-of-the-art approaches that are not explicitly designed to improve robustness perform at a level comparable to that achieved by those that are. Our study and results are intended to provide insight into the current state of safe and robust reinforcement learning and a foundation for the advancement of the field, in particular, for deployment in robotic systems.
Mono-Camera 3D Multi-Object Tracking Using Deep Learning Detections and PMBM Filtering
Feb 27, 2018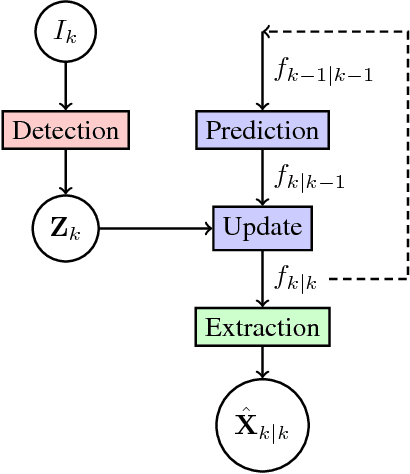
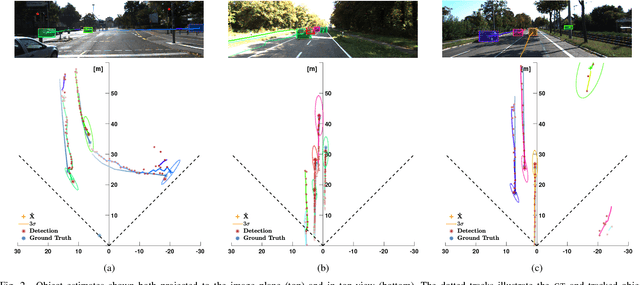

Monocular cameras are one of the most commonly used sensors in the automotive industry for autonomous vehicles. One major drawback using a monocular camera is that it only makes observations in the two dimensional image plane and can not directly measure the distance to objects. In this paper, we aim at filling this gap by developing a multi-object tracking algorithm that takes an image as input and produces trajectories of detected objects in a world coordinate system. We solve this by using a deep neural network trained to detect and estimate the distance to objects from a single input image. The detections from a sequence of images are fed in to a state-of-the art Poisson multi-Bernoulli mixture tracking filter. The combination of the learned detector and the PMBM filter results in an algorithm that achieves 3D tracking using only mono-camera images as input. The performance of the algorithm is evaluated both in 3D world coordinates, and 2D image coordinates, using the publicly available KITTI object tracking dataset. The algorithm shows the ability to accurately track objects, correctly handle data associations, even when there is a big overlap of the objects in the image, and is one of the top performing algorithms on the KITTI object tracking benchmark. Furthermore, the algorithm is efficient, running on average close to 20 frames per second.